1.本发明的一方面涉及一种用于识别车辆与生物的潜在碰撞的方法。本发明的另一方面涉及一种停车场管理系统(parkhausmanagementsystem)。
背景技术:
2.现代的驾驶员辅助系统(其安装在车辆本身处)能够直接检测机动车辆的周围环境中的物体并且就此而言还能够识别生物。这例如可利用机动车的摄像机实现。
3.此外,为了避免与车门碰撞,通常实现多个车辆彼此之间的信息交换。这样的例如由文件de 10 2014 219 388 a1已知。如那里所阐述的那样,在那里也可设置成,观察设备检测带有应保护的车门的车辆或接近的车辆,并且然后将相应的消息输入到车辆自组织网络(fahrzeug
‑
ad
‑
hoc
‑
netzwerk)中,然后该消息警告带有应保护的车门的车辆和/或接近的车辆。就此而言也可能的是,还可通过观察设备将行人纳入。
4.此外,由文件de 10 2011 082 325 a1已知,如果门被打开,这样的车辆(其打开门且其门应被保护免于碰撞)自主地给出信号。
5.独立于所阐述的这些场景,对于车辆可出现可与生物潜在碰撞的个别情况,其中,就此而言在特定地点处的生物可以是预期不到的。
技术实现要素:
6.本发明的目的是,提供一种方法以及一种停车场管理系统,在其中可改善地避免在停车场中与生物碰撞。
7.该目的通过根据独立权利要求的方法和停车场管理系统来实现。
8.本发明的一方面涉及一种用于识别车辆与生物的潜在碰撞的方法。监控车辆所处的停车场中功能单元的至少一个运行状态。如果通过监控装置识别功能单元的这样的特征性运行状态(其表征生物在停车场中的直接潜在的和因此可能的出现),那么将提示信息传递到车辆处并且/或者改变车辆的运行方式。通过这样的操作方式来提高停车场中的运行安全性。因此恰恰在可发生关于出现的生物的各种不同情况的停车场中,可实现根据相当特定的标准(即停车场的至少一个技术功能单元的识别出的特征性运行状态)来识别可能在可预见的时间或立即随后至少一个生物将在停车场中出现。通过停车场本身的至少一个功能单元(其因此持久地属于停车场)的这样的特征性运行状态,可存在一定的概率和因此推测,即生物处于停车场中或在停车场中的特定地点处或将出现。通过特征性运行状态来间接地(即使生物还不存在和/或可识别)指出生物的潜在存在。因此在这样的场景中,还实现如果生物还不在停车场中的特定地点处并且可能也还没有被识别、尤其还没有被车辆识别,那么然而已可推断生物至少有可能将在特定的地点处出现。由此,现在可通过本发明对此作出反应。尤其地,对此可将提示传递到车辆处并且/或者可改变车辆的运行方式。该改变也可通过车辆本身自动地来执行。生物例如可以是人类,例如儿童或老人或成人。然而,生物也可以是动物。因此,通过该设计方案可实现恰恰在停车场中改善地防止与生物的可
能碰撞。
9.在一有利的实施方案中设置成,将车辆的当前位置传送到停车场的停车场管理系统处。如果停车场的功能单元在车辆的当前位置的区域中并且/或者预期生物在当前位置的区域中的潜在出现,将提示信息传送到车辆处。该预期可以是立即随后的或者可在特定的时间区间之内提供。如果识别出生物可在这样的地点(车辆处于其处或就处于其之前)处直接出现,那么恰恰可进行提示信息的相应的传递和/或车辆的运行方式的改变。因此可前瞻性地预防潜在的碰撞。因此在该有利的实施方案中,智能地检查可能的生物是否处于停车场中的某个地方,在那里根本不能出现与车辆的非危急情况并且因此潜在的碰撞是不可能的。通过该有利的实施方案即检查这样的生物可在哪里,或者根据当前时间点在一定的时间窗口中大概率可在哪里,以及那么这是否相应于车辆的当前位置,从而实际上可出现潜在的碰撞。通过这样的设计方案尤其仅考虑这样的场景,其实际上也可导致潜在碰撞。由此避免不必需的提示信息的不必要过载。由此也可防止车辆的运行方式的不必要改变。
10.优选地设置成,根据功能单元的特征性运行状态、尤其通过停车场管理系统来估计生物到达当前位置处的时间点,并且根据车辆的当前运行方式来确定车辆在所估计的时间点是否还处于当前位置周围的对于碰撞关键的区域中。这是另一非常有利的实施方案,因为就此而言也前瞻性地对于未来的潜在碰撞进行判断或评估,并且然后进行相应的提示信息和/或运行方式的改变。就此而言,也可发生交叉的场景。就此而言,例如可马上已给出以下提示信息,即可能由于当前的条件在可能的时间区间x中可出现与生物的潜在碰撞。尤其如果继续监视该潜在碰撞并且根据该至少一个功能单元的特征性运行状态来评估生物的可能的出现地点和此外还实际的出现,那么在时间上随后也可进行车辆的运行方式的实际改变。
11.通过这样的操作,一方面再次更精确地且更符合需求地执行潜在碰撞的判断。因此,可改善地考虑实际的潜在碰撞并且可更精确地判定是否且必要时何时输出提示信息,并且/或者是否且必要时何时进行车辆的运行方式的改变。如果潜在碰撞不能被直接预期,而是可在相对于当前时间点的一定的时间窗口中延迟地出现,那么这尤其有利。
12.在一有利的实施方案中设置成,在车辆的显示单元中显示图像,在该图像中至少局部地显示停车场。尤其可设置成,在该图像上显示车辆的当前位置和/或与生物的潜在碰撞可出现的地点。在一有利的实施方案中可设置成,在该图像中显示车辆与潜在碰撞地点之间的间距。该距离也可动态变化地来显示。就此而言,尤其还可在这样的图像中显示停车场中车辆的行驶轨迹。尤其地,这可以是这样的行驶轨迹,其通向潜在的停车区。就此而言,那么尤其还可识别出沿着该行驶轨迹观察在哪个地点处可出现潜在的碰撞。尤其地,通过这样的实施方案可将更好的直观理解(潜在的碰撞地点可能在哪里)传达给车辆用户。
13.因此尤其在如下停车场(在其中通常由于停放的车辆和/或墙壁和/或入口和出口和/或楼梯间和/或电梯和/或最多样化蜿蜒的预设的车道和/或用于到达停车场的其他层的螺旋形盘绕的车道构造有不可见的和/或不清楚的区域)中,可改善地了解与生物的预期不到碰撞地点并且更简单地理解和避免与生物的预期不到碰撞地点。
14.优选地设置成,尤其根据当前的和/或未来可预期的车辆信息来估计车辆在停车场中的未来位置并且将其传送到车辆的停车场管理系统处。如果功能单元在未来位置的区域中并且/或者预期生物在车辆的未来位置或地点的区域中的潜在出现,将提示信息传送
到车辆处。就此而言还可设置成,根据功能单元的特征性运行状态来估计生物潜在到达车辆的该未来位置处的时间点,并且根据车辆的当前运行方式和车辆的未来可预期的运行方式来确定车辆在所估计的时间点是否处于未来的位置。
15.在一有利的实施方案中设置成,作为功能单元,尤其利用监控装置来监控停车场中的电梯。该电梯的特征性运行状态是尤其到车辆当前所处的和/或未来可预期所在的层上的移动和停靠。如果识别出电梯的这样的特定的特征性运行状态,可出现生物与车辆的潜在碰撞。电梯的这些信息(其何时移动以及其向哪里移动以及其移动到哪个层上)可经由停车场管理系统来管理。基于这些信息,那么还可确定电梯何时到达相应层中的登入口位置(zustiegsstelle)和/或登出口位置以及因此生物可能可在哪个时间点从在特定层上的电梯中出来。如果该时间点和与此有关的地点那么是这样的(那么车辆在哪个时间点和在哪个地点处于那里),可通过停车场管理系统识别潜在的碰撞情况。尤其地,那么可在这样的场景中将至少一个提示信息传送到车辆处并且/或者改变车辆的运行方式。
16.如果该情况涉及如下电梯(其登入口和/或登出口在车辆的当前位置的和/或车辆的未来可预期的位置的区域中),那么恰恰本发明是有利的。如果生物在电梯门打开时直接并且尤其可能在没有注意停车场中的情况的情况下出来,那么恰恰可在车辆接近时出现碰撞,该碰撞通过该有利的实施方案来避免。
17.在一有利的实施方案中设置成,作为功能单元,监控停车场中的电动打开的门。作为该电动打开的门的特征性运行状态,判断并且相应地识别尤其在车辆当前所处的和/或未来可预期所在的层上的打开。电动打开的门尤其是这样的,其在生物处于附近时自动打开。尤其地,门在此在生物无须抓取门本身且例如利用门把手打开门的情况下打开。电动打开的门尤其是这样的,在其中例如通过移动警报器(bewegungsmelder)来识别生物接近到门处,并且门就此而言那么提早地且在生物到达门之前打开。此外,这样电动打开的门还可通过开启开关(oeffnungsschalter)实现,该开启开关布置在门外部(例如与门有若干间距地固定在墙壁处)并且该开启开关可通过用户或生物来操纵。就此而言,那么还在生物直接且立即处于门处之前实现门的自动打开。即使还没有识别到和检测到生物,门的这样的打开也能够大概率推测生物的出现将出现、尤其就即将来临。当即识别出门的这样的打开时,如果然后车辆处于打开的门的区域中的该当前位置处,则又可经由停车场管理系统推断与车辆的潜在碰撞。
18.在另一有利的实施方案中可设置成,作为功能单元,尤其在车辆当前所处的和/或未来可预期所在的层上监控停车场中的移动警报器。如果移动警报器被触发或生物在其检测区域中移动,相应地探测该生物。尤其地,基于利用移动警报器的这种探测进行进一步的处理。尤其地,例如可根据此接通停车场在某一层上或在某一区域中的照明。因此,可基于通过移动警报器的探测和/或由此进行的处理(在其中改变停车场的另外的功能单元的运行状态)推断如下生物,其处于移动警报器的区域中,或者立即或未来在特定的可确定的时间区间中处于停车场中的该激活的功能元件所处的地点处。由此,那么可推断生物在该地点或停车场的该区域中的潜在出现。如果车辆那么在该时间点还处于移动警报器的该区域中和/或处于该区域(在其中通过移动警报器的信息使停车场的其他功能单元的运行方式改变)中,则可推断出车辆与潜在生物的潜在碰撞情况。就此而言,那么可符合需求地进行到车辆处的提示信息和/或车辆的运行方式的改变。
19.在一有利的实施方案中设置成,作为功能单元,监控停车场中停车区的占用传感器。作为该占用传感器的特征性运行状态,识别尤其在车辆当前所处的和/或未来可预期所在的层上当前由该占用传感器产生的占用信号。就此而言,尤其检测停车区的当前的或目前进行的以车辆的占用。因为恰恰在这样的场景中就接下来或在该占用之后的短时间区间之内可预期生物从停放到停车区中的该车辆中出来,就此而言也可出现碰撞情况。如果车辆处于该停车区(另一车辆直接停入了其中)的区域内,可由于生物从停放的车辆中可预期的登出和接近的其他车辆而产生潜在碰撞情况。这也被检测、评估和判断,并且必要时执行到车辆处的提示信息和/或车辆的运行方式的改变。
20.在一有利的实施方案中可设置成,停车场的光学检测设备、尤其摄像机直接检测生物并且根据此将提示信息传递到车辆处,并且/或者在停车场中其他车辆的检测单元直接检测生物并且通过停车场中其他车辆的检测单元检测停车场的功能单元的特征性运行状态并且根据此将提示信息传递到可能与生物碰撞的车辆处。
21.可设置成,该至少一个监控装置(利用其监控至少一个功能单元)布置在可能遭受与生物的潜在碰撞的车辆外部。该监控装置布置在停车场中。监控装置也可布置在车辆处。尤其地,这可以是这样的车辆,其可能与在停车场中的生物潜在碰撞。
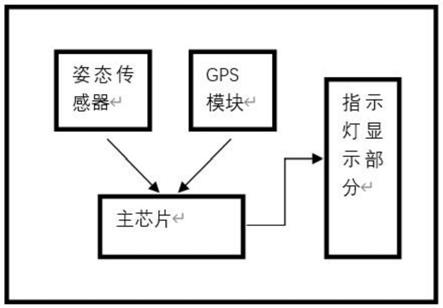
22.本发明的另一方面涉及一种停车场管理系统,其带有至少一个功能单元和车辆。停车场管理系统构造用于执行根据上面所提到的方面或其中的一有利设计方案的方法。尤其地,该方法利用停车场管理系统来执行。停车场管理系统可具有至少一个控制单元。该停车场管理系统可具有至少一个存储单元。优选地,停车场管理系统还可具有评估单元。停车场管理系统优选地具有计算机程序。该计算机程序具有指令,所述指令(当其存储在计算机、尤其控制单元上时)可执行根据上面所提到的方面或其中的一有利设计方案的方法。
23.通过本发明的所提到的方面,还提供了一种用于停车场的碰撞评价方法。
24.作为车辆的运行方式的改变,可设置有特定的转向操纵和/或速度变化。尤其地,这可作为到手动操纵车辆的车辆驾驶员处的信息实现。在自动车辆中,运行方式的这些改变可通过车辆本身来执行。
25.本发明还包括所说明的实施形式的特征的组合。
附图说明
26.接下来说明本发明的实施例。对此,唯一的图示出了停车场的示意图。
27.接下来所阐述的实施例是本发明的一优选实施形式。在该实施例中,实施形式的所说明的组件相应示出了本发明的应彼此独立地考虑的各个特征,所述特征还相应彼此独立地改进本发明并且因此还可被单独地或以不同于所示的组合视为本发明的组成部分。此外,所说明的实施形式还可通过本发明的已说明的特征中的另外特征来补充。
具体实施方式
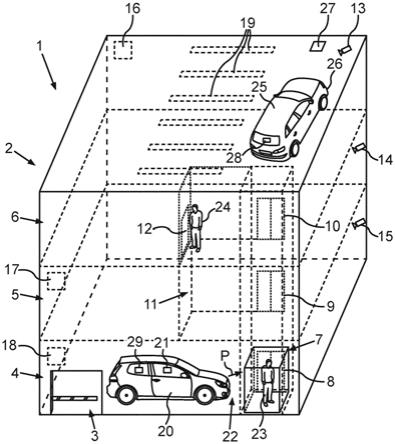
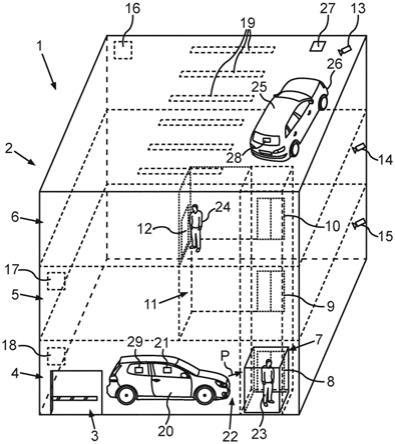
28.在唯一的图中以示意图示出了停车场1。停车场1具有停车场管理系统2。利用电子停车场管理系统可至少减少停车场中的车辆与停车场中的生物之间的潜在的碰撞情况。
29.停车场1具有驶入口3,车辆可经由驶入口驶入到停车场1中和/或可驶出。停车场1例如具有第一层4,其是底层。此外,停车场1例如具有第二层5和第三层6。车辆可被停放在
所有层4至6中。对此,相应构造有预设的停车区。
30.此外,停车场1具有至少一个电梯7。在不同的层4至6中,在电梯7中构造有登入口和/或登出口8,9和10。此外,停车场1例如还具有楼梯间11。该楼梯间同样在不同层上具有门,可从所述门离开楼梯间11进入到相应层4至6的停车区域中或者可从这些门中出来。例如,在图中在层6中示出了门12。该门尤其是电动打开的门。
31.此外,停车场1具有至少一个监控装置13。可在每个层上布置有监控装置13,14,15。也可相应设置有多个监控装置。电梯7和门12是停车场1的技术功能单元。另外的技术功能单元例如可以是至少一个移动警报器16。可设置有多个移动警报器16,17,18。这些移动警报器也是停车场1的功能单元。另外的技术功能单元例如可以是照明装置19,其中在此仅光源中的若干个设有附图标记。尤其地,照明装置可自动运行。例如,这就此可以是这种情况:即如果生物进入在层4至6的停车区域中,那么自动激活照明装置19。这例如可以是这种情况:取决于通过移动警报器16至18来识别生物的这样的进入。设置成,监控车辆20所处的停车场1中所提到的功能单元中的至少一个的至少一个运行状态。如果通过至少一个监控装置13至15和/或通过车辆2的监控装置21识别功能单元的特征性运行状态,该运行状态表征生物在停车场1中、尤其在这样的区域(车辆可在其中移动并且车辆可被停放在其中)中的直接潜在出现,那么将提示信息传递到车辆20处并且/或者改变车辆20的运行方式。这可通过车辆20的控制单元29来评估和控制。因此避免处于停车场1中的还移动或者此后还将移动的车辆20与这样的生物碰撞。因此通过该操作方式,使能够根据功能单元的运行状态实现如下评估:生物是否将在停车场1的特定区域中出现。因此,该方法使能够在没有已直接检测到或识别到可能的生物的情况下就此判断是否须考虑到生物的出现。这些特征性运行状态就此是特定的,即其可通过生物来触发和/或仅可通过生物来触发。因此,功能单元的这些特征性运行状态示出了如下标准,其能够大概率或可靠地推断至少一个生物在场或将在不久的未来在场。
32.可设置成,将车辆20的当前位置22传送到停车场管理系统2处,并且如果功能单元处于当前位置22的区域中并且/或者预期生物在当前位置22的区域中的潜在出现,将提示信息传递到车辆20处。如此,那么这可以是在图中这种情况:人23在层4中从电梯7中登出。例如,特征性运行状态就此来识别,即电梯7从层6或层5向下行驶或已向下行驶,并且在登入口和/或登出口地点8处从电梯7中的登出就即将来临。因为车辆20处于电梯7、尤其在楼层4中的登入口和/或登出口8的区域中,可能在生物23(其在此是人类)出来时出现在箭头p的方向上移动的车辆20与该生物23之间的碰撞。
33.可设置成,根据功能单元(在此电梯7)的特征性运行状态来估计生物23潜在到达当前位置处的时间点,并且根据车辆20的当前运行方式来确定车辆20在所估计的时间点是否还处于当前位置22周围的对于碰撞关键的区域中。如果车辆20在所估计的时间点还将处于该区域中,那么进行到车辆20处的提示信息和/或车辆20的运行方式的改变。相应的也可关于车辆20在停车场1中的未来可预期的位置进行。这可根据当前的和/或未来可预期的车辆信息来估计。
34.同样附加于此或替代于此,如果车辆20例如将处于层6中,门20的打开可作为特征性运行状态来检测。那么可推断生物24通过门12走到停车场在层6中的这样的区域(车辆在其中移动和/或停放)中。在此,那么也可发生如之前关于在电梯7中的生物23所阐述的那样
的相应场景。同样可能的是,如果生物24将走进层6并且对此直接提前使门12自动打开,那么这通过移动警报器16来检测。同样可设置成,根据生物24在停车场1的该区域中的进入来自动激活照明装置19,并且检测功能单元19的该特征性运行状态(即从解除激活状态变成激活状态),并且由此推断生物24的就即将来临的出现。如果车辆20在层6上处于楼梯间11的区域中并且因此处于门12的区域中,那么还可推测与可能进来的生物24的潜在碰撞。那么还可进行到车辆20处的相应的提示信息和/或车辆20的运行方式的改变。
35.在另一示例中可设置成,在停车场1中存在另外的车辆25。可设置成,车辆25刚好停入到停车区26中。这可通过该停车区26的移动传感器27来探测。在此产生占用信号,其示出了从空闲状态到占用状态的直接变化。该信息可被传送到停车场管理系统2处。因为在这样的情况中可预期生物从另一车辆25中的就即将来临的登出,如果车辆20处于层6上并且尤其在车道上接近车辆25,那么可进行到车辆20处的提示信息和/或车辆20的运行方式的改变。因此还可避免处于车辆25中的生物与车辆20潜在碰撞。如果另一车辆25的生物从该另一车辆中登出并且那么可能将走到层6中的邻接于停车区26的车道上,那么尤其如此。
36.恰恰在总常常由于现状多角的结构占主导并且就此而言不清楚的现状占主导的停车场中,可通过所提出的方法和所提出的停车场管理系统来实现改善地避免车辆和生物的碰撞。这不仅可在通过驾驶员手动控制的车辆中来实现,而且可在至少部分地、尤其全自动驾驶的车辆中来实现。潜在的碰撞可被提早识别,如果与潜在碰撞有关的潜在生物也还没有被车辆本身识别并且也还没有被直接检测,那么还如此。
37.同样可能的是,车辆20利用监控装置21检测车辆中的周围环境,并且就此而言还可检测功能单元的这样的特征性运行状态。附加于此或替代于此还可能的是,另外的车辆、例如在停车场1中的车辆25也可利用车辆内部的监控装置28检测周围环境,并且就此而言还可检测功能单元的特征性运行状态。这些信息可从车辆25被传递到车辆20处和/或到停车场管理系统2处。
38.车辆的运行方式的改变可以是转向操纵的执行或转向操纵的执行的准备。附加于此或替代于此,还可执行速度改变、尤其制动或者可进行这样的速度改变过程的准备。可设置成,如果车辆20通过驾驶员手动地来操纵,然而当驾驶员没有进行必需的反应时,那么还可进行车辆20的电子车辆引导系统的自动干预。可设置成,停车场1和因此还停车场管理系统2仅将功能单元(如电梯7和/或可电子打开的门12和/或移动警报器16至18和/或照明装置19)中的原始数据传递到车辆20处。这些原始数据的进一步处理然后通过车辆20本身的控制单元29进行。还可设置成,原始数据的该处理通过停车场管理系统2来执行。在这样的实施方案中,那么将已被处理的数据传送到车辆20。
39.停车场管理系统还可理解成如下系统,在其中车辆可被停放在为此限定地设置的停车区中。因此就此而言,停车场无须强制性地是封闭的建筑物。就此而言,其还可以是仅处于一层中的有限的停车区域,该停车区域具有附加的特定的代表性功能单元,所述功能单元可占据特征性运行状态,所述运行状态能够推断生物在功能单元的区域中的存在。然而优选地,停车场是带有至少一个层的由墙壁限制的建筑物,从而就此而言例如存在电梯7和/或楼梯间11和/或电动打开的门12和/或照明装置19和/或移动警报器16至18和/或紧急出口等。
40.附图标记清单
1 停车场2 停车场管理系统3 驶入口4 第一层5 第二层6 第三层7 电梯8 登入口和/或登出口9 登入口和/或登出口10登入口和/或登出口11 楼梯间12 门13 监控装置14 监控装置15 监控装置16 移动警报器17 移动警报器18 移动警报器19 照明装置20 车辆21 监控装置22 位置23 生物24 生物25 车辆26 停车区27 移动传感器28 监控装置29 控制单元。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。