技术特征:
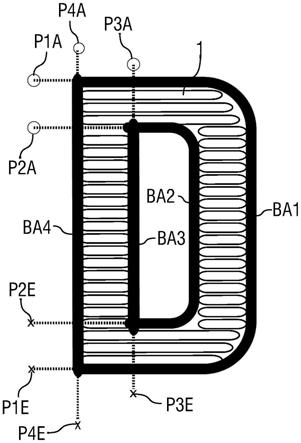
1.一种用于用涂覆剂涂覆部件、特别是用于涂装机动车辆车身部件的涂覆方法,其包括以下步骤:a)在待涂覆的部件的部件表面上限定图案(3),所述图案(3)是以轮廓(2;5、6)为边界的表面区域,以及b)在轮廓(2;5、6)内用涂覆剂对部件表面进行区域涂覆,其特征在于以下步骤:c)沿着图案(3)的轮廓(2;5、6)的至少一部分用涂覆剂对部件表面进行锐边涂覆。2.根据前述权利要求中任一项所述的涂覆方法,其特征在于,在轮廓(2;5、6)内的区域涂覆以比沿着轮廓(2;5、6)的锐边涂覆更大的面积涂覆性能进行。3.根据权利要求1所述的涂覆方法,其特征在于a)涂覆是借助于具有多个喷嘴的施涂器(13)执行的,所述多个喷嘴能够单独地或成组地启用或停用以用于涂覆,b)对于轮廓(2;5、6)内的区域涂覆,与沿着轮廓(2;5、6)的锐边涂覆的情况相比,为涂覆启用更多数量的喷嘴,c)对于沿着轮廓(2;5、6)的锐边涂覆,优选施涂器(13)的少于20、10、5个喷嘴或仅单个喷嘴被启用以用于涂覆。4.根据前述权利要求中任一项所述的涂覆方法,其特征在于a)沿着图案(3)的轮廓(2;5、6)的锐边涂覆是借助于由机械手(12)、特别是具有串联机器人运动学特性的多轴涂覆机器人(12)沿着轮廓(2;5、6)移动的施涂器(13)执行的,以及b)施涂器(13)在锐边涂覆期间沿着轮廓(2;5、6)以一定的流动速率施涂涂覆剂,以及c)在锐边涂覆期间,机械手(12)沿着轮廓(2;5、6)以特定速度在部件表面之上移动施涂器(13),以及d)在沿着轮廓(2;5、6)进行锐边涂覆期间d1)涂覆剂的流动速率根据移行速度来调整,以便在部件表面上获得尽可能恒定的涂层厚度,或d2)涂覆剂的流动速率保持恒定。5.根据前述权利要求中任一项所述的涂覆方法,其特征在于a)沿着图案(3)的轮廓(2;5、6)的锐边涂覆是借助于由机械手(12)、特别是具有串联机器人运动学特性的多轴涂覆机器人(12)沿着轮廓(2;5、6)移动的施涂器(13)执行的,以及b)在锐边涂覆期间,机械手(12)沿着轮廓(2;5、6)以特定的移行速度在部件表面之上移动施涂器(13)并且沿轮廓(2;5、6)移行,以及c)机械手(12)不是连续沿轮廓(2;5、6)移行,而是在多个路径区段(ba1
‑
ba4)中移行,以及d)施涂器(13)在轮廓(2;5、6)的紧接相继的路径区段(ba1
‑
ba4)的涂覆之间中断涂覆剂的输送。6.根据权利要求5所述的涂覆方法,
其特征在于a)紧接相继的路径区段(ba1
‑
ba4)在轮廓(2;5、6)的问题点(7
‑
10)处、特别是在轮廓(2;5、6)的弯折点处彼此邻接,所述问题点(7
‑
10)的特征在于,机械手(12)只有在移行速度急剧下降、特别是下降超过50%、70%、80%或90%的情况下才能够不间断地通过所述问题点(7
‑
10),和/或b)机械手(12)在紧接相继的路径区段(ba1
‑
ba4)的涂覆之间在问题点(7
‑
10)处执行无弯折的开始运动,以便在紧接随后的路径区段处再次开始。7.根据前述权利要求中任一项所述的涂覆方法,其特征在于a)轮廓(2;5、6)的锐边涂覆是用在射流的纵向方向上接续的涂覆剂射流进行的,或b)轮廓(2;5、6)的锐边涂覆首先用在射流的纵向方向上接续的涂覆剂射流进行,然后用由在射流的纵向方向上不接续的大量液滴组成的液滴射流进行。8.根据前述权利要求中任一项所述的涂覆方法,其特征在于,图案(3)的区域涂覆和轮廓(2;5、6)的锐边涂覆是用在射流的纵向上接续的涂覆剂射流和用由在射流的纵向上不接续的大量液滴组成的液滴射流交替地进行的,并且实际上a)在时间上交替,或b)在图案(3)与轮廓(2;5、6)之间交替。9.根据前述权利要求中任一项所述的涂覆方法,其特征在于以下步骤:a)首先涂覆图案(3),然后涂覆轮廓(2;5、6),或b)首先涂覆轮廓(2;5、6),然后涂覆图案(3)。10.根据前述权利要求中任一项所述的涂覆方法,其特征在于以下步骤:a)首先涂覆图案(3),然后涂覆轮廓(2;5、6),以及b)借助于测量系统(11)、特别是借助于光学测量系统(11),被施涂到部件表面的图案(3)在其空间位置和范围方面被检测,以便在图案(3)的区域涂覆之后确定轮廓(2;5、6)。11.根据权利要求1至9中任一项所述的涂覆方法,其特征在于以下步骤:a)首先涂覆轮廓(2;5、6),然后涂覆图案(3),以及b)借助于测量系统(11)、特别是借助于光学测量系统(11)检测被施涂到部件表面的轮廓(2;5、6),以便确定图案(3)的区域范围。12.根据权利要求10或11所述的涂覆方法,其特征在于a)测量系统(11)附接到机械手(12)并与机械手(12)一起移动,或b)测量系统(11)与机械手(12)分开地以固定方式布置。13.根据前述权利要求中任一项所述的涂覆方法,其特征在于a)轮廓(2;5、6)内的区域涂覆与沿着轮廓(2;5、6)的锐边涂覆相比用不同的涂覆剂、特别是用不同颜色的涂覆剂进行,和/或
b)不同图案(3)的区域涂覆用不同的涂覆剂、特别是用不同颜色的涂覆剂进行,和/或c)不同轮廓(2;5、6)的锐边涂覆用不同的涂覆剂、特别是用不同颜色的涂覆剂进行。14.根据前述权利要求中任一项所述的涂覆方法,其特征在于a)涂覆剂在被施涂到部件表面之后,仅能够在一定的流动时间内流动,以便在部件表面上形成平面连续涂层,以及b)图案(3)的区域涂覆和沿着相邻的轮廓(2;5、6)的锐边涂覆以比流动时间短的时间间隔实现,使得轮廓(2;5、6)的和表面的涂覆剂能够融混在一起。15.根据权利要求1至13中任一项所述的涂覆方法,其特征在于a)轮廓(2;5、6)内的区域涂覆与沿着轮廓(2;5、6)的锐边涂覆相比用不同的涂覆剂、特别是用不同颜色的涂覆剂进行,以及b)涂覆剂在被施涂到部件表面之后,仅能够在一定的流动时间内流动,以便在部件表面的整个区域之上形成平面连续涂层,以及c)图案(3)的区域涂覆和沿着相邻的轮廓(2;5、6)的锐边涂覆以大于流动时间的时间间隔进行,使得轮廓(2;5、6)的和表面的不同的涂覆剂不融混在一起。16.根据前述权利要求中任一项所述的涂覆方法,其特征在于a)涂覆剂是由不发射喷雾射流、而是发射狭窄受限的涂覆剂射流的施涂器(13)施涂的,和/或b)涂覆剂射流b1)由在射流的纵向方向上彼此分离的涂覆剂液滴组成,或b2)在射流的纵向方向上是接续的,和/或c)施涂器(13)由机械手(12)、特别是由具有串联机器人运动学特性的多轴涂覆机器人(12)在部件表面之上移动,和/或d)机械手(12)具有比5mm、2mm或0.5mm更精确的空间定位精度和/或可重复性精度,和/或e)涂覆剂是涂料、特别是单组分涂料或双组分涂料、水性涂料或溶剂型涂料、或粘附剂、粘附促进剂、底漆、膏状材料、密封剂、绝缘材料,和/或f)涂覆剂是以施涂器(13)与部件表面之间的一定施涂距离施涂的,其中,所述施涂距离为1mm
‑
80mm、5mm
‑
50mm或10mm
‑
25mm。17.根据前述权利要求中任一项所述的涂覆方法,其特征在于以下步骤中的至少一个:a)确定用于引导施涂器的机械手的类型,b)从存储器中读出机械手所特定的参数集,所述机械手所特定的参数集表示机械手的属性,c)限定施涂器的类型,d)从存储器中读取施涂器所特定的参数集,所述施涂器所特定的参数集表示施涂器的属性,
e)限定路径程序所特定的参数集,所述路径程序所特定的参数集限定机器人路径的属性,特别是e1)涂覆路径宽度,e2)机器人路径的曲线半径,e3)涂层体积流量,e4)最大路径速度,f)从存储器中读取图案,g)分析读出的图案以确定轮廓,h)计算路径程序,路径程序特别是带有h1)接近路径,h2)离开路径,h3)接通点,和/或h4)关闭点,i)可视化路径程序。18.一种用于用涂覆剂涂覆部件、特别是用于涂装机动车辆车身部件的涂覆设备,其具有a)用于施涂涂覆剂的施涂器(13),b)用于在部件表面之上移动施涂器(13)的机械手(12)、特别是具有串联机器人运动学特性的多轴涂覆机器人(12)的形式的机械手(12),以及c)用于控制机械手(12)和施涂器(13)的控制系统(14),其特征在于d)控制系统(14)能执行根据前述权利要求中任一项所述的涂覆方法。19.根据权利要求18所述的涂覆设备,其特征在于,用于检测图案(3)和/或轮廓(2;5、6)的空间位置和范围的测量系统(11),所述测量系统(11)与控制系统(14)处于信号连接。20.一种其上存储有计算机程序的计算机可读介质、特别是计算机存储器,当计算机程序在施涂系统的控制系统上执行时,所述计算机程序使施涂系统执行根据权利要求1至17中任一项所述的涂覆方法。
技术总结
本发明涉及一种用涂覆剂(例如涂料)涂覆部件(例如机动车辆车身部件)的涂覆方法,所述涂覆方法包括以下步骤:
技术研发人员:H-G
受保护的技术使用者:杜尔系统股份公司
技术研发日:2020.05.04
技术公布日:2021/12/14
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。