1.本发明属于光测实验力学和数字摄影测量技术领域,具体涉及一种基于形态学特征的亚像素级边缘检测方法。
背景技术:
2.在光测实验力学和数字摄影测量实验中,往往利用圆形标记点作为测量目标。例如在结构动力学的光学测量中,就需要对圆形标记点中心的位置坐标进行实时测量,获取结构振动过程中的位移响应数据;点云匹配过程中,也需要利用圆形标记点进行坐标辨识与图像拼接。但在实验过程中,往往由于结构的变形与拍摄角度的改变使得实际得到的圆形标记点的图像变为椭圆形。因此,对椭圆标记点的有效检测是解决工程测量问题的基础。椭圆检测算法同样也被应用与交通标志检测、医学研究、车轮检测等诸多应用领域,具有广泛的应用价值。
3.目前常见的椭圆检测方法有拟合方法、基于霍夫变换的椭圆检测方法以及随机椭圆检测方法等。拟合方法受噪声影响较大,当目标图像受到明显噪声污染时,其检测精度将无法满足实际需求;基于霍夫变换的椭圆检测方法虽然在去噪方面存在优势,但对内存要求高,运算效率低,无法满足快速检测的需要;随机椭圆检测算法在一定程度上改进了基于霍夫变换的椭圆检测方法在检测效率上的不足,但该方法严格由参数控制,且相关参数往往不易取到合适值,因此无法保证其具有很强的鲁棒性。并且现有椭圆检测方法的检测精度往往仅停留在整像素级别,检测出的椭圆几何信息的精度普遍不高,且存在非目标椭圆误检测等问题。亚像素级的椭圆检测方法目前鲜有发明。因此,为满足工程实际需求,急需对现有的椭圆检测算法进行改进,从而实现对椭圆边缘的精确检测。
技术实现要素:
4.要解决的技术问题
5.为解决当前检测技术所存在的问题,本发明提够了一种基于形态学特征的亚像素级椭圆检测方法。
6.技术方案
7.一种基于形态学特征的亚像素级椭圆检测方法,其特征在于步骤如下:
8.步骤1:获取目标图像,并对目标图像进行预处理:采用形态学处理里面的闭运算对目标图像进行处理;
9.步骤2:采用基于局部子区的亚像素级边缘检测算法对步骤1处理后的图像进行亚像素级边缘检测,得到边缘点信息;
10.步骤3:将步骤2中得到的亚像素级边缘点的坐标信息进行四舍五入取整操作,从而得到边缘的整像素坐标信息;
11.步骤4:对整像素边缘信息进行精确筛选;
12.首先对步骤3中得到的边缘点计算连通区域并进行编号,从而排除非连通区域的
边缘信息;进而根据目标椭圆的几何特征设定相应的筛选准则,对检测到的连通区域进行进一步筛选排除,最终得到准确的像素级椭圆边缘点坐标位置信息;
13.步骤5:通过步骤4得到的目标椭圆整像素边缘坐标信息及索引数组,索引得到对应的亚像素级边缘点坐标;
14.步骤6:采用最小二乘法对步骤5中得到的亚像素级椭圆边缘点坐标进行椭圆拟合,从而得到椭圆的几何信息,即:椭圆中心点坐标、长短半轴。
15.本发明进一步的技术方案:步骤1预处理还包括对非灰度图像进行灰度处理。
16.本发明进一步的技术方案:步骤1中用半径为1个像素的圆盘形结构元素进行闭运算。
17.本发明进一步的技术方案:所述的圆盘形结构元素可以替换为矩形结构元素。
18.本发明进一步的技术方案:所述步骤2的具体过程为:
19.首先对目标图像f(x,y)进行平滑处理得到平滑去噪后的目标图像g(x,y),取一定的窗口大小的局部子区进行分析;假设局部边缘线的表达式为y=ax2 bx c;若像素点未被边缘线贯穿,则该像素点强度即为其灰度值;若像素点被边缘线贯穿,则被贯穿的像素点强度用如下公式计算得到:
[0020][0021]
其中,f(i,j)表示坐标(i,j)点处的像素强度值;p
i,j
表示该像素点在边缘线下方的面积;h表示一个像素点的长度;a、b表示该像素点在边缘线两侧像素区域的强度,可由如下表达式计算得到:
[0022][0023]
局部边缘线方程的系数可通过如下表达式进行计算得到:
[0024][0025][0026][0027]
其中,s
l
、s
m
、s
n
分别为子区窗口中左、中、右三列像素的强度之和;l、m、n分别表示子区窗口中各列对应的边缘线下方区域的面积;
[0028]
利用计算得到的局部边缘线的方程即可得到边缘的亚像素位置坐标。
[0029]
本发明进一步的技术方案:所述步骤4中的筛选准则为:连通区域面积筛选范围π
·
r2<area<π
·
r2,椭圆长轴大于2r个像素,椭圆偏心率e小于0.7;其中r、r分别为椭圆的长短半轴。
[0030]
有益效果
[0031]
本发明提出了一种基于形态学特征的亚像素级椭圆检测方法,将亚像素级边缘检
测算法与椭圆的形态学特征相结合,将检测误差从整像素级降低为亚像素级,有效提高了椭圆检测的精度。该方法具有高精度、高效率的优点。为光测实验力学和数字摄影测量领域提供了一个可行的技术手段。
[0032]
步骤一中的形态学闭运算操作,确保检测到的目标椭圆区域连通。步骤二利用基于局部子区的亚像素级边缘检测算法,将边缘点坐标由整像素级提高到亚像素级,大大提高了检测精度,为结构动力学分析提供了高信噪比的实验数据。步骤三、四中的连通区域计算与基于目标椭圆的形态学特征的边缘筛选,实现了目标椭圆的边缘保留与非目标区域的筛选排除,有效避免了非目标椭圆误检测的问题。步骤五中的索引方法可以将整像素级坐标与亚像素级坐标相联系,使得亚像素级边缘检测算法与整像素级的形态学分析方法相结合,提高椭圆检测的准确性。最终通过步骤六的最小二乘法椭圆拟合算法,得到目标椭圆的基本方程及几何信息。
附图说明
[0033]
附图仅用于示出具体实施例的目的,而并不认为是对本发明的限制,在整个附图中,相同的参考符号表示相同的部件。
[0034]
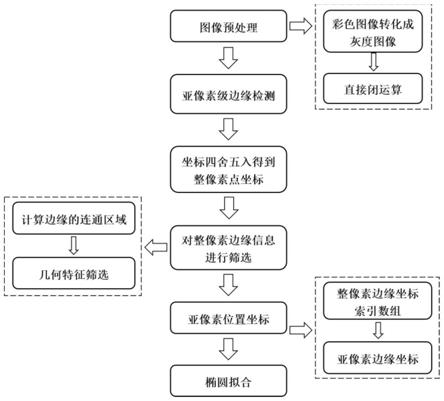
图1是本发明一种基于形态学特征的亚像素级椭圆检测方法的流程图;
[0035]
图2是亚像素级边缘检测的大小为5
×
3的局部子区;
[0036]
图3是本发明检测两个椭圆目标的检测结果。
[0037]
图4所示为利用此种方法和传统方法进行光测结构动力学实验的时域数据对比图。
[0038]
图5所示为利用此种方法和传统方法进行光测结构动力学实验的频域数据对比图。
具体实施方式
[0039]
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图和实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本发明,并不用于限定本发明。此外,下面描述的本发明各个实施方式中所涉及到的技术特征只要彼此之间未构成冲突就可以相互组合。
[0040]
如图1所示,本发明提出的一种基于形态学特征的亚像素级椭圆检测方法,具体步骤如下:
[0041]
步骤一:图像采集及图像预处理。利用相机等相关手段对目标图像进行采集,将采集到的图像记作f(x,y)。若f(x,y)为彩色图像则需转化为灰度图像;若f(x,y)为灰度图像则直接使用;为保证目标椭圆的连通性,将f(x,y)用半径为1个像素的圆盘形结构元素进行直接闭运算操作,用来填充物体内细小空洞、连接临近物体,并且在平滑其边界的同时并不明显改变其面积。
[0042]
步骤二:进行基于局部子区的亚像素级边缘检测。将步骤一中得到的图像f(x,y)进行平滑处理得到平滑去噪后的目标图像g(x,y);进而选取大小为5
×
3的局部子区进行边缘分析,如图2所示。设边缘线方程为y=ax2 bx c;某一像素点的强度值用f(i,j)表示,若该像素点被边缘线贯穿,则该像素点的强度值用如下表达式表示:
[0043][0044]
其中,f(i,j)表示坐标(i,j)点处的像素强度值;p
i,j
表示该像素点在边缘线下方的面积;h表示一个像素点的长度。a、b表示边缘线两侧像素区域的强度估计值,可由如下表达式计算得到:
[0045][0046]
设s
l
、s
m
、s
n
分别为子区窗口中左、中、右三列像素的强度之和,其表达式为:
[0047][0048][0049][0050]
其中l、m、n分别表示各列对应的边缘线下方区域的面积,有如下表达式:
[0051][0052][0053][0054]
由此,即可求得全部未知量,局部边缘线方程的系数即可通过如下表达式进行计算得到:
[0055][0056][0057][0058]
步骤三:由亚像素级坐标转化为整像素级坐标。将步骤二中得到的亚像素级边缘点坐标进行四舍五入取整,从而将其转化成整像素级边缘点坐标,且二者对应的索引数组不变,便于后期进行索引查找。
[0059]
步骤四:边缘信息筛选。将步骤三中得到的整像素边缘点信息选择8连通计算方式进行连通区域计算,并进行编号。由此可以将非连通区域进行筛选排除,仅保留类椭圆形状的连通区域边缘点信息。进而根据目标椭圆的几何信息设定参考阈值,即椭圆的长短半轴r、r和椭圆偏心率e。根据如下筛选准则进行筛选排除:
[0060]
π
·
r2<area<π
·
r2,且椭圆长轴大于2r个像素,且椭圆偏心率e小于0.7。
[0061]
因此,根据以上筛选准则将满足筛选准则的边缘信息予以保留,从而获得准确的椭圆边缘的整像素点位置信息。
[0062]
步骤五:索引得到亚像素级边缘点位置坐标。由于椭圆边缘整像素点坐标索引数组与亚像素点一一对应,因此可以根据步骤四中经过筛选得到的椭圆边缘整像素点位置坐标的索引数组索引得到对应的亚像素点的椭圆边缘点位置坐标。
[0063]
步骤六:利用步骤五中得到的椭圆边缘点的亚像素级坐标信息进行最小二乘椭圆拟合,得到椭圆一般方程ax2 bxy cy2 dx ey 1=0中的相关系数。利用得到的椭圆方程即可使用下述公式计算得到椭圆的几何中心坐标及长短半轴的长度。
[0064]
椭圆几何中心为:
[0065]
长短半轴分别为:
[0066]
图3为利用此种方法检测运动机构中双椭圆图像得到的椭圆边缘检测情况。
[0067]
为验证此种方法的有效性,利用本发明进行光测结构动力学实验验证,并与传统像素级椭圆检测方法进行对比。实验结果表明,本发明所提方法对于光测结构动力学中椭圆中心点检测的时域和频域分析均具有更低的检测误差,检测结果具有更高的准确性。
[0068]
图4所示为利用此种方法和传统方法进行光测结构动力学实验的时域对比图。
[0069]
将利用激光测试系统的光测测试结果作为基准,将两种检测方法分别得到的时域振动位移结果与基准结果进行误差分析。结果表明,传统方法的测试误差为0.0102mm;本发明方法的测试误差为0.0064mm,测量误差明显降低。
[0070]
图5所示为利用此种方法和传统方法进行光测结构动力学实验的频域对比图。
[0071]
可以看出,传统方法测试结果的本底噪声为0.0003mm;本发明方法测试结果的本底噪声为0.0001mm,噪声误差明显降低。
[0072]
综上所述,本发明公开了一种基于形态学特征的亚像素级椭圆检测方法,将亚像素级边缘检测算法与椭圆的形态学特征相结合,从图像中精确提取目标椭圆的亚像素级边缘点坐标,有效提高了椭圆检测的准确性,可以广泛应用于相关工业检测中。
[0073]
以上所述,仅为本发明的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明公开的技术范围内,可轻易想到各种等效的修改或替换,这些修改或替换都应涵盖在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。