嵌套阵列非高斯环境下的正交匹配追踪doa估计方法
技术领域
1.本发明属于波达方向(direction of arrival,doa)估计技术领域。
背景技术:
2.最近,一种新型的稀疏阵列得到了广泛关注,即嵌套阵列,它由两个均匀线阵组合而成。m1 m2阵元的嵌套阵列可以获得2m2(m1 1)
‑
1的虚拟线阵连续自由度(degree of freedom,dof),而阵元个数相同的均匀线阵(uniform linear array,ula)只能获得m1 m2‑
1的dof。因此,嵌套阵列结构大大提高了可探测信源数,能够获得角度估计性能的提升。大多数doa估计方法均假设环境噪声为高斯分布。然而,实际中的噪声往往表现出非高斯特性,可能会表现出高脉冲特性,从而导致doa估计不够精确。
技术实现要素:
3.发明目的:为了解决上述现有技术存在的问题,本发明提供了一种嵌套阵列非高斯环境下的正交匹配追踪doa估计方法。
4.技术方案:本发明提供了一种嵌套阵列非高斯环境下的正交匹配追踪doa估计方法,包括如下步骤:
5.s1:通过嵌套阵列结构的阵列天线接收信号,得到接收信号信息x;
6.s2:根据接收信号信息x,计算相位分数低阶矩估计矩阵r
pflom
;
7.s3:将r
pflom
进行向量化处理,得到向量化后的虚拟阵列接收信号z
pflom
;
8.s4:去除z
pflom
中冗余项,得到阵元间距为半波长的虚拟均匀线阵接收信号
9.s5:基于阵元间距为半波长的虚拟均匀线阵接收信号并采用正交匹配追踪方法得到doa的精确估计。
10.进一步的,所述s1中嵌套阵列结构的阵列天线包括阵元数为m1的第一子阵和阵元数为m2的第二子阵;所述第一子阵的阵元间距为d0,第二子阵的阵元间距为(m1 1)d0,其中d0=λ/2,λ为载波波长。
11.进一步的,所述s1中接收信号信息x的表达式如下所示:
12.x(l)=as(l) n(l)
13.其中,x(l)为x中的第l个时域快拍,a为方向矩阵,a=[a(θ1),
…
,a(θ
k
),
…
a(θ
k
)],其中a(θ
k
)为方向矢量,t为矩阵转置,θ
k
为第k个窄带信号的doa,k=1,2,
…
,k,k为窄带信号的总个数;l
f
为将第一子阵的阵元位置和第二子阵的阵元位置按照从小到大排序后的第f个阵元位置,n(l)是服从对称α稳定分布的脉冲噪声项,α是特征指数,0<α≤2,s(l)=[s1(l),
…
,s
k
(l),
…
s
k
(l)]
t
为信号矢量,s
k
(l)为第k个信号矢量。
[0014]
进一步的,所述s3中虚拟均匀线阵接收信号z
pflom
为:
[0015]
z
pflom
=(a
*
⊙
a)s
pflom
υ
pflom
[0016]
其中*为共轭操作,表示kronecker积,
⊙
表示k
‑
r积,s
pflom
表示信号能量,υ
pflom
表示脉冲噪声项拉伸后的向量。
[0017]
进一步的,所述s2中相位分数低阶矩估计矩阵r
pflom
为:
[0018][0019][0020]
其中,r
pflom
(i,j)表示r
pflom
中第i行第j列的元素,x
i
(l)表示x中第i行的第l个快拍,x
j
(l)表示x中第j行的第l个快拍,b表示矩的阶数,表示期望函数,l表示总的快拍数。
[0021]
进一步的,所述s5中正交匹配追踪方法中通过最小化如下公式恢复信号:
[0022][0023]
是预设的网格化导向矩阵a
θ
的第j
[i]
列,i为迭代次数,i=1,2,
…
,k,k为窄带信号的总个数,为第i个恢复后的信号,为第i个待恢复信号,argmin为取最小值函数;所述预设的网格化导向矩阵a
θ
的表达式如下所示:
[0024][0025][0026]
其中,g为网格数,θ
g
表示网格角度,t为转置,d=m2(m1 1)
‑
1。
[0027]
进一步的,所述s4中虚拟均匀线阵接收信号表示如下:
[0028][0029]
为阵元间距为半波长的虚拟均匀线阵导向矩阵,为阵元间距为半波长的脉冲噪声向量,s
pflom
表示信号能量。
[0030]
有益效果:本发明提出的一种嵌套阵列非高斯环境下的正交匹配追踪doa估计方法,实现了嵌套阵列脉冲噪声环境下的doa精确估计,提高了自由度,且估计性能优于传统均匀线阵doa估计方法。
附图说明
[0031]
图1是本发明的嵌套阵列结构示意图;
[0032]
图2是本发明嵌套线阵虚拟阵列结构示意图;
[0033]
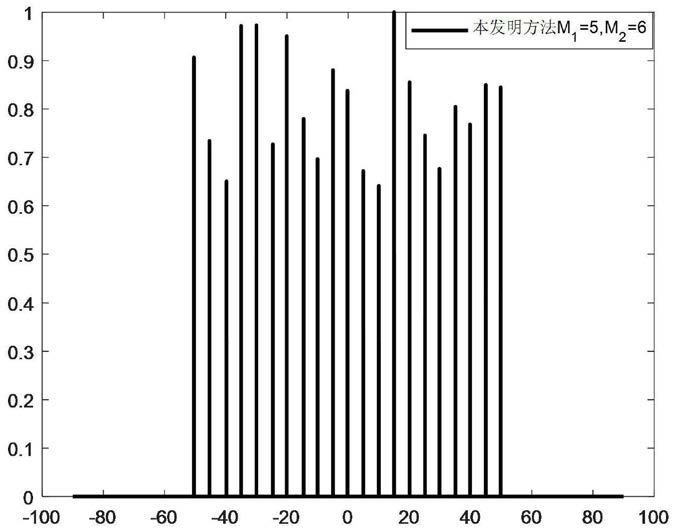
图3是当11个信源入射到嵌套阵列,且m1=m2=4,α=1.3时,采用本发明的方法在单次mc实验下doa估计谱峰搜索示意图;
[0034]
图4是当7个信源入射到嵌套阵列,且m1=m2=4时,运行500次mc实验比较采用本发明方法与其他算法在不同广义信噪比条件下的rmse性能示意图;
[0035]
图5是当7个信源入射到嵌套阵列,且m1=m2=4时,运行500次mc实验比较采用本发明方法与其他算法在不同快拍数条件下的rmse性能示意图;
[0036]
图6是当7个信源入射到嵌套阵列,且m1=m2=4时,运行500次mc实验比较采用本发明方法与其他算法在不同特征指数条件下的rmse性能示意图。
具体实施方式
[0037]
构成本发明的一部分的附图用来提供对本发明的进一步理解,本发明的示意性实施例及其说明用于解释本发明,并不构成对本发明的不当限定。
[0038]
本实施例基于如下原理提供一种嵌套阵列非高斯环境下的正交匹配追踪doa估计方法,本实施例的具体方法为:
[0039]
一、嵌套阵列噪声模型和数据模型
[0040]
噪声模型:
[0041]
在如雷达回波、低频大气噪声和水声信号研究中,噪声往往由幅度较大的不规则脉冲或噪声尖峰组成,即脉冲噪声。近年来,sαs分布能够很好地描述这类具有显著尖峰脉冲特性,可以用特征函数φ(t)表示为:
[0042][0043][0044][0045]
其中,t是特征函数的变量,0<α≤2是特征指数,它的大小能够影响此分布的脉冲程度,j为虚数单位,γ是分散参数,其含义与高斯分布的方差一致;β是偏度参数,δ是位置参数,当β=δ=0时的分布为对称α稳定(sαs)分布。
[0046]
数据模型:
[0047]
如图1所示的阵列天线结构由两个阵元数分别为m1和m2的子阵组成,阵元数为m1的均匀线阵阵元间距是d0,阵元数为m2的阵元间距是(m1 1)d0,其中d0=λ/2为半波长,则阵元位置集合为:
[0048][0049]
令是从小到大按照第一个阵元作为参考系的阵列间距排序操作,l
f
是阵元位置从小到大排序后的第f个阵元位置。
[0050]
假设k个窄带信号的doa分别为θ
k
,k=1,2,
…
,k,入射到如图1所示的嵌套线阵上,则阵列接收信号可表示为:
[0051]
x(l)=as(l) n(l)
[0052]
其中,x(l)为x中的第l个时域快拍,a=[a(θ1),
…
,a(θ
k
),
…
a(θ
k
)]为方向矩阵,
为方向矢量,n(l)是服从对称α稳定分布的脉冲噪声项,s(l)=[s1(l),
…
,s
k
(l),
…
s
k
(l)]
t
为信号矢量,t为矩阵转置。
[0053]
二、角度估计方法
[0054]
本实施例中将上述噪声模型和数据模型应用于本发明的doa估计算法中,也就是omp方法,其具体包括如下步骤:
[0055]
步骤1,计算pflom估计协方差矩阵r
pflom
。
[0056]
根据数据模型可以得到接收信号量测信息,计算pflom估计协方差矩阵r
pflom
:
[0057]
pflom估计协方差矩阵:
[0058][0059]
其中c为x
i
(l)或x
j
(l)
[0060]
其中i,j表示pflom估计协方差矩阵中的行,r
pflom
(i,j)表示r
pflom
中第i行第j列的元素;x
j
(l)表示矩阵x中第j行的第l个快拍,x
i
(l)表示矩阵x中第i行的第l个快拍,b表示矩的阶数,表示期望函数,l表示总的快拍数。
[0061]
步骤2,虚拟化。
[0062]
2.1、将步骤一得到的协方差矩阵r
pflom
进行向量化处理得到z
pflom
:
[0063]
z
pflom
=vec(r
pflom
)=(a
*
⊙
a)s
pflom
υ
pflom
[0064]
其中表示kronecker积,
⊙
表示k
‑
r积,*表示共轭操作,θ
k
为第k个窄带信号的doa,k=1,2,
…
,k,其中k为窄带信号的总个数。a(θ
k
)为θ
k
方向上的方向向量,s
pflom
表示信号能量,υ
pflom
表示脉冲噪声项拉伸后的向量,vec(
·
)表示向量化操作。
[0065]
2.2、由于嵌套阵列的虚拟阵列是由差阵构成,定义:
[0066]
差阵:
[0067]
根据差阵虚拟阵元位置排序,对重复位置的信息取平均(称作去冗余),得到阵元间距为半波长的虚拟均匀线阵接收信号
[0068][0069]
其中为阵元间距为半波长的虚拟均匀线阵导向矩阵,d=m2(m1 1)
‑
1,为阵元间距为半波长的脉冲噪声向量,如图2所示是m1=4,m2=4时的虚拟阵列。
[0070]
步骤3,正交匹配追踪(omp)算法。
[0071]
由上述步骤2最后得到了阵元间距为半波长的虚拟均匀线阵接收信号通过以下步骤即可得到doa的精确估计:
[0072]
3.1、定义一个网格化的导向矩阵:
[0073]
[0074][0075]
其中g为网格数,本实施例取g=18001,即θ1:θ
g
=
‑
90
°
:0.01
°
:90
°
以0.01
°
为间隔。
[0076]
3.2、omp算法流程
[0077]
omp方法是通过最小化下式来恢复信号:
[0078][0079]
其中是网格化导向矩阵a
θ
的第j
[i]
列,i是迭代次数,为第i个恢复后的信号,为第i个待恢复信号。
[0080]
输入:a
θ
,k;
[0081]
初始化:残差待恢复信号索引集
[0082]
for i=1 to k
[0083]
step1:计算内积:其中[
·
]
h
表示共轭转置;
[0084]
step2:找出使得内积最大的索引:
[0085]
step3:更新索引集:j
[i]
=j
[i
‑
1]
∪j
[i]
;
[0086]
step4:计算最小二乘解:
[0087]
step5:更新残差:
[0088]
end for
[0089]
输出:
[0090]
找出中的非零元素位置即可得到每个窄带信号的doa估计。
[0091]
三、性能分析和实验分析
[0092]
1、空间自由度分析(degree of freedom,dof)
[0093]
由上述分析可知,本发明方法得到的空间自由度为dof=2d 1,d=m2(m1 1)
‑
1,而传统均匀线阵在相同阵元数的情况下,空间自由度为m1 m2‑
1,本发明增加了一定的自由度。
[0094]
2、复杂度分析
[0095]
以复乘次数作为计算复杂度评判标准,本发明方法的复杂度主要包括:pflom估计协方差矩阵的复杂度为o{3p2l},其中o{.}为复杂度计算函数,计算内积计算复杂度为o{(2d 1)g},最小二乘解此时的k为k个窄带信号,更新残差故本发明方法的总复杂度为:
[0096]
[0097]
3、实验分析
[0098]
为了验证上述方法的效果,本实施例中进行了多次仿真实验,并且对实验性能进行了分析,具体如下:
[0099]
1、实验性能评价指标
[0100]
在脉冲噪声环境下,广义信噪比定义为:
[0101][0102]
s表示信号矢量,γ表示脉冲噪声的分散参数。
[0103]
性能估计标准为联合均方根误差(root mean square error,rmse)定义为:
[0104][0105]
其中,为第j’次蒙特卡罗过程第k个信源doa的精确估计值,k表示信源个数,mc表示蒙特卡罗试验次数。
[0106]
2、实验效果图
[0107]
图3是当k=11个信源入射到嵌套阵列时,doa为
‑
50
°
5
°
(k
‑
1),k=1,
…
,k,利用本发明方法得到的谱峰搜索图,本实施例仅运行了一次mc实验。此时嵌套阵列的子阵阵元数分别为m1=5,m2=6,快拍l=500,gsnr=6db。脉冲噪声特征指数α=1.3,可以看出,本发明方法能够得到准确的doa估计。
[0108]
图4是在α=1.3,快拍l=500的情况下,不同广义信噪比下的算法性能比较,本实施例运行了500次mc实验,7个信源的方位角为[
‑
10
°
,0
°
,10
°
]。可以看出,在相同广义信噪比条件下,本发明方法具有更好的doa估计性能。
[0109]
图5是在gsnr=5db,α=1.3的情况下,不同快拍数下的算法性能比较,本实施例运行了500次mc实验,7个信源的方位角为[
‑
10
°
,0
°
,10
°
]。可以看出,本实施例方法性能随着快拍数的增加而提升,相同快拍条件下,本发明方法估计性能优于传统均匀线阵doa估计方法。
[0110]
图6是在gsnr=5db,快拍l=500的情况下,不同特征指数条件下的算法性能比较,本实施例运行了500次mc实验,3个信源的方位角为[
‑
10
°
,0
°
,10
°
]。可以看出,本发明方法性能随着特征指数α的增加而提升,相同α条件下,本发明方法估计性能较好。
[0111]
综上所述,从仿真效果图的分析可知,本发明提出的一种嵌套阵列非高斯环境下的正交匹配追踪doa估计方法,实现了嵌套阵列脉冲噪声环境下的doa精确估计。提高了自由度,且估计性能优于传统均匀线阵doa估计方法。
[0112]
上面结合附图对本发明的实施方式作了详细说明,但是本发明并不限于上述实施方式,在本领域普通技术人员所具备的知识范围内,还可以在不脱离本发明宗旨的前提下做出各种变化。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。