1.本发明涉及建筑领域,更具体地说是一种全过程智能建筑工程监理设备。
背景技术:
2.建筑监理设备包括通讯设备、测量设备、运输设备等,所使其通过测量设备能有效的将建筑工程之中的实际长度与建模设计长度进行校准对比,从而有效提升相应的建筑质量以及建筑安全性能等效果;综上所述本发明人发现,现有的监理设备主要存在以下缺陷:监理设备自身的建筑测量器在进行房屋墙梁拐角处测量相应的长度以及间距时,由于房屋拐角处为“l”形状或“v”形状,所使测量器在对于交接处无法进行弯曲固定,从而在对于特殊形状拐角处的部位则容易出现无法快速进行测量以及智能机器本身出现数据判定错误等问题。
技术实现要素:
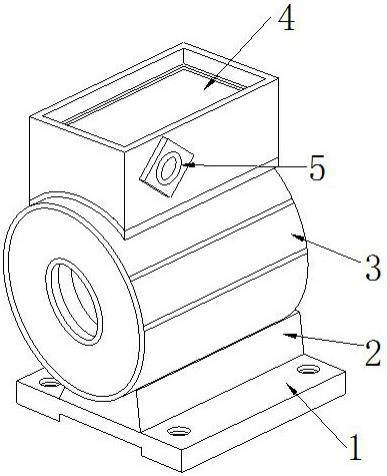
3.本发明实现技术目的所采用的技术方案是:一种全过程智能建筑工程监理设备,其结构包括,定位板、底座、测量器、数据端、控制块,所述定位板上端与底座进行固定连接,所述测量器嵌入于底座之中,所述数据端与测量器相连接,所述控制块与数据端进行控制连接,所述测量器通过数据端与控制端进行通电连接。
4.所述测量器设有平衡杆、腔体、通孔、测量杆、活动座,所述平衡杆嵌入于腔体之中,所述通孔与腔体为一体,所述测量杆贯穿于通孔之中,所述活动座与测量杆进行活动连接,所述测量杆通过活动座与控制块进行控制连接,所述测量杆与数据端进行控制连接,所述测量杆与底座进行定位连接,所述平衡杆两侧装有相应的固定块并且自身内部嵌有多个滑轮。
5.作为本发明的进一步改进,所述测量杆设有实心杆、转动体、凸块,所述实心杆与转动体进行活动连接,所述凸块与实心杆为一体,所述转动体与通孔相通,所述转动体与活动座进行活动连接,所述实心杆为实心状态并且自身存有相应的测量块与各部件形成相互连接的状态。
6.作为本发明的进一步改进,所述转动体设有中心轮、提升环、活动体,所述中心轮与提升环进行活动连接,所述活动体安装于提升环的外侧,所述活动体与实心杆进行活动连接,所述中心轮外侧装有四根顶杆,提升环内部含有多个滚珠,活动体为弧形形状。
7.作为本发明的进一步改进,所述活动体设有柔韧块、三角体、控制圈、滑杆、连接块,所述柔韧块与三角体进行固定连接,所述控制圈嵌入于三角体的上端,所述滑杆与控制圈进行活动连接,所述连接块与滑杆进行固定连接,所述控制圈与提升环进行活动连接,所述柔韧块为橡胶材质所制成,三角体为实心状态,控制圈镶嵌在三角体的上端,从而滑杆为弧形形状,以至于连接块具有相应的卡扣。
8.作为本发明的进一步改进,所述控制圈设有外壳、衔接槽、集卷环、卡合环、吸附块,所述外壳与衔接槽为一体,所述集卷环与衔接槽相通,所述卡合环嵌入于集卷环之中,
所述吸附块与卡合环进行固定连接,所述集卷环与滑杆进行活动连接,所述外壳与三角体进行固定连接,所述外壳为实心状态,衔接槽为双层空心现象,集卷环内侧含有反弹轴。
9.作为本发明的进一步改进,所述凸块设有顶杆、驱动块、伸缩器,所述顶杆下端与驱动块进行活动连接,所述伸缩器与驱动块进行活动连接,所述伸缩器下端与实心杆进行定位连接,所述伸缩器在驱动块的两侧各设有一块,并且形成对称状态。
10.作为本发明的进一步改进,所述伸缩器设有中心轴、伸缩杆、接触块,所述中心轴与伸缩杆进行间隙配合,所述接触块与伸缩杆为一体,所述接触块通过中心轴与驱动块进行活动连接,所述接触块为半圆形状。
11.作为本发明的进一步改进,所述接触块设有限位体、支撑杆、缓冲块,所述限位体与支撑杆进行固定连接,所述缓冲块嵌入于支撑杆的上端,所述限位体与伸缩杆进行固定连接,所述支撑杆通过伸缩杆与中心轴进行活动连接,所述缓冲块具有极强的韧性以及吸附效果。
12.与现有技术相比,本发明具有如下有益效果:1.本发明由测量器改进后,测量杆的转动体能随着墙梁体的形状变化而调整实心杆的形状,以至于能在墙梁体为“v”形、“l”形状态下进行测量,致使转动体通过中心轮调整形状的同时自身活动体的柔韧块可随着夹角形状变化对滑杆挤压以至于将柔韧块全部挤压在三角体表端从而形成相应的“v”形形状,以至于能有效的解决房屋拐角处的测量问题,断绝了机器无法对拐角处的测量效果,同时提升了测量拐角处的固定效果防止测量过程产生的位置偏移以及测量杆掉落的现象。
13.2.本发明由实心杆上凸块所改进后通过自身所新增的顶杆受墙体挤压后能带动驱动块对伸缩器的触发效果,以至于伸缩器根据自身伸缩杆上端的接触块能有效的适应墙体硬度的变化并且能根据缓冲块内部的吸附块定位在相应的部位之中,以至于能有效的加强凸块与墙体的固定效果进一步的提升测量稳定性同时能对墙体的硬度进行测量。
附图说明
14.图1属于一种全过程智能建筑工程监理设备的结构示意图。
15.图2属于一种测量器侧视的结构示意图。
16.图3属于一种测量杆改进后正视的结构示意图。
17.图4属于一种转动体剖视的结构示意图。
18.图5属于一种活动体正视的结构示意图。
19.图6属于一种控制圈内部正视的结构示意图。
20.图7属于一种凸块改进后正视的结构示意图。
21.图8属于一种伸缩器活动正视的结构示意图。
22.图9属于一种接触块正视的结构示意图。
23.图中:定位板
‑
1、底座
‑
2、测量器
‑
3、数据端
‑
4、控制块
‑
5、平衡杆
‑
31、腔体
‑
32、通孔
‑
33、测量杆
‑
34、活动座
‑
35、实心杆
‑
341、转动体
‑
342、凸块
‑
343、中心轮
‑
a1、提升环
‑
a2、活动体
‑
a3、柔韧块
‑
a31、三角体
‑
a32、控制圈
‑
a33、滑杆
‑
a34、连接块
‑
a35、外壳
‑
b1、衔接槽
‑
b2、集卷环
‑
b3、卡合环
‑
b4、吸附块
‑
b5、顶杆
‑
c1、驱动块
‑
c2、伸缩器
‑
c3、中心轴
‑
c31、伸缩杆
‑
c32、接触块
‑
c33、限位体
‑
d1、支撑杆
‑
d2、缓冲块
‑
d3。
具体实施方式
24.以下结合附图对本发明做进一步描述:实施例1:图1至图6所示:本发明提供一种全过程智能建筑工程监理设备,其结构包括,定位板1、底座2、测量器3、数据端4、控制块5,所述定位板1上端与底座2进行固定连接,所述测量器3嵌入于底座2之中,所述数据端4与测量器3相连接,所述控制块5与数据端4进行控制连接,所述测量器3通过数据端4与控制端5进行通电连接。
25.所述测量器3设有平衡杆31、腔体32、通孔33、测量杆34、活动座35,所述平衡杆31嵌入于腔体32之中,所述通孔33与腔体32为一体,所述测量杆34贯穿于通孔33之中,所述活动座35与测量杆34进行活动连接,所述测量杆34通过活动座35与控制块5进行控制连接,所述测量杆34与数据端4进行控制连接,所述测量杆34与底座2进行定位连接,,所述平衡杆31两侧装有相应的固定块并且自身内部嵌有多个滑轮,所述平衡杆31通过两侧装有的固定块能加强自身的定位效果,以及滑轮能提升测量杆34的活动速度以及平衡性。
26.其中,所述测量杆34设有实心杆341、转动体342、凸块343,所述实心杆341与转动体342进行活动连接,所述凸块343与实心杆341为一体,所述转动体342与通孔33相通,所述转动体342与活动座35进行活动连接,所述实心杆341为实心状态并且自身存有相应的测量块与各部件形成相互连接的状态,所述实心杆341通过自身的实心状态能有效的维持测量效果并且根据测量块能将实时数据传输到相应的部件之中。
27.其中,所述转动体342设有中心轮a1、提升环a2、活动体a3,所述中心轮a1与提升环a2进行活动连接,所述活动体a3安装于提升环a2的外侧,所述活动体a3与实心杆341进行活动连接,所述中心轮a1外侧装有四根顶杆,提升环a2内部含有多个滚珠,活动体a3为弧形形状,所述中心轮a1通过外侧顶杆能维持自身的活动稳定性,以及提升环a2能提升相应的转变速度,致使活动体a3根据自身弧形形状能有效的与墙体的形状进行相互配合。
28.其中,所述活动体a3设有柔韧块a31、三角体a32、控制圈a33、滑杆a34、连接块a35,所述柔韧块a31与三角体a32进行固定连接,所述控制圈a33嵌入于三角体a32的上端,所述滑杆a34与控制圈a33进行活动连接,所述连接块a35与滑杆a34进行固定连接,所述控制圈a33与提升环a2进行活动连接,所述柔韧块a31为橡胶材质所制成,三角体a32为实心状态,控制圈a33镶嵌在三角体a32的上端,从而滑杆a34为弧形形状,以至于连接块a35具有相应的卡扣,所述柔韧块a31通过自身材质能与三角体a32进行快速的形状转变达到与墙体形状吻合的状态,并且控制圈a33根据自身的镶嵌部位能达到稳固效果,致使滑杆a34能维持柔韧块a31形状转变平衡效果,以至于连接块a35能增加滑杆a34与柔韧块a31内部的卡合性能。
29.其中,所述控制圈a33设有外壳b1、衔接槽b2、集卷环b3、卡合环b4、吸附块b5,所述外壳b1与衔接槽b2为一体,所述集卷环b2与衔接槽b2相通,所述卡合环b4嵌入于集卷环b3之中,所述吸附块b5与卡合环b4进行固定连接,所述集卷环b3与滑杆a34进行活动连接,所述外壳b1与三角体a32进行固定连接,所述外壳b1为实心状态,衔接槽b2为双层空心现象,集卷环b3内侧含有反弹轴,所述外壳b1通过自身的实心状态能维持衔接槽b2的位置,衔接槽b2通过自身的双层空心状态能与各部件形成相应的活动效果,致使集卷环b3根据自身的
反弹轴能有效的为后续部件的复位起到关键作用。
30.本实施例的具体功能与操作流程:本发明中,建筑工程监理设备通过自身的测量器3的定位板1与底座2能将本体进行定位在原点,以至于通过控制块5与数据端4的相互配合下能直接对测量器3进行控制达到测量墙梁体的效果,致使测量器3的活动座35将测量杆34伸出对墙梁测量时遇到相应的拐角处时,测量杆34的转动体342可随之将实心杆341的形状进行调换,进而凸块343能将各部件稳固在墙体之中,所使转动体342的中心轮a1在将实心杆341的形状转变时提升环a2则会增加相应的转变速度以及防止卡死现象的产生,致使外侧的活动体a3受墙梁拐角形成的“v”形状状态下能将柔韧块a31进行不断挤压以至于滑杆a34将被挤入控制圈a33的集卷环b3进行收集归纳,同时柔韧块a31最终会全部堆积在三角体a32的表端中从而形成相应的“v”形状达到对拐角的测量效果,致使控制圈a33通过衔接槽b2对滑杆a34进行归纳在集卷环b3之中后集卷环中心的吸附块b5则会固定在墙体上增加相应的测量固定效果,最终测量完毕后通过集卷环b3的反弹效果下能使各部件形成快速复原的效果,综上所述通过各个部件的相互配合下能有效的解决房屋拐角处的测量问题,断绝了机器无法对拐角处的测量效果,同时提升了测量拐角处的固定效果防止测量过程产生的位置偏移以及测量杆掉落的现象。
31.实施例2:图7至图9所示:本发明提供一种全过程智能建筑工程监理设备,其结构包括,所述凸块343设有顶杆c1、驱动块c2、伸缩器c3,所述顶杆c1下端与驱动块c2进行活动连接,所述伸缩器c3与驱动块c2进行活动连接,所述伸缩器c3下端与实心杆341进行定位连接,所述伸缩器c3在驱动块c2的两侧各设有一块,并且形成对称状态,所述伸缩器c3通过自身的数量与对称状态下能有效的提升对墙体的测量固定效果。
32.其中,所述伸缩器c3设有中心轴c31、伸缩杆c32、接触块c33,所述中心轴c31与伸缩杆c32进行间隙配合,所述接触块c33与伸缩杆c32为一体,所述接触块c33通过中心轴c31与驱动块c2进行活动连接,所述接触块c33为半圆形状,所述接触块c33通过半圆状态能延长自身的使用周期以及触碰墙体时能防止测量过程中产生的刮擦情况。
33.其中,所述接触块c33设有限位体d1、支撑杆d2、缓冲块d3,所述限位体d1与支撑杆d2进行固定连接,所述缓冲块d3嵌入于支撑杆c2的上端,所述限位体d1与伸缩杆c32进行固定连接,所述支撑杆d2通过伸缩杆c32与中心轴c31进行活动连接,所述缓冲块d3具有极强的韧性以及吸附效果,所述缓冲块d3通过自身的韧性以及吸附性能加强自身的测量效果以及固定效果。
34.本实施例的具体功能与操作流程:本发明中,通过实施例1的基础作用下,所使实心杆341上端凸块343所进一步改进后通过自身顶杆c1被墙体终点定位挤压后能带动驱动块c2对伸缩器c3进行控制,以至于伸缩器c3通过自身的中心轴c31能将伸缩杆c32进行伸出达到将接触块c33与墙面形成相互贴合的状态,以至于接触块c33的缓冲块d3能通过自身的柔韧性不断对墙体挤压并且根据自身的吸附性能定位在原点,同时支撑杆d2能位置相应的稳定效果,综上所述通过各个部件的相互配合下能有效的加强凸块与墙体的固定效果进一步的提升测量稳定性同时能对墙
体的硬度进行测量提升相应的测量效率。
35.利用本发明所述技术方案,或本领域的技术人员在本发明技术方案的启发下,设计出类似的技术方案,而达到上述技术效果的,均是落入本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。