1.本发明属于冶炼技术领域,特别涉及一种缓冷场内渣包位状态的识别方法。
背景技术:
2.我国的冶炼技术快速发展的同时,矿产原料日渐匮乏,为提高资源的综合利用率,将冶炼炉渣进行缓冷后选矿回收有价金属已逐渐成为处理铜冶炼炉渣的主流工艺。在缓冷炉渣时,先在缓冷场中自然缓冷,待炉渣冷却至目标温度时,向渣包喷淋冷却水,加快其冷却速度,促进结晶析出以获得较大的结晶,有利于后续的选矿。
3.缓冷场中渣包位众多且渣包的温度高达1000℃,人工记录、监测缓冷状态存在安全隐患且信息传递效率低,容易因渣包缓冷不到位导致喷淋时渣包温度过高发生爆包或倒包时出现红包的问题。为解决上述问题,中国专利cn106406146a公开了一种炉渣缓冷过程智能控制系统及方法,该方法对渣包进行编号,在放包、取包作业时,对渣包标签进行识别对比以防止错取渣包,然而渣包在使用时温度高,渣包缓冷场所湿度大,使得渣包标签造价高、易损坏,识别困难;该方法预设时间段,当自然冷却时间达到设定值后自动开启喷淋水加快冷却速度,待喷淋冷却时间达到预设值后,系统自动关闭喷淋水,然而,在不同季节不同天气情况下,自然冷却时间和喷淋水冷却时间不同,采用相同的预设时间,仍旧无法保证渣包的高效安全缓冷。
技术实现要素:
4.本发明的目的在于提供一种能准确、可靠地获知缓冷场内渣包位状态的识别方法。
5.为实现以上目的,本发明采用的技术方案为:一种缓冷场内渣包位状态的识别方法,门式起重机位移后停止时,将其大车、小车的坐标与缓冷场内的渣包位进行匹配;若匹配失败,待小车下一次位移后停止时再次匹配;若匹配成功,标记该渣包位为当前渣包位,根据当前渣包位的历史状态和吊钩的运行情况更新当前渣包位的状态。
6.与现有技术相比,本发明存在以下技术效果:无需在渣包位处或渣包上另设标记,匹配门式起重机上大车、小车与渣包位的坐标后,在门式起重机进行转运作业时及时记录对应渣包位的状态变化,能高效率、低成本地实现渣包位状态的实时、准确同步,避免放包、取包错误导致的生产事故。
附图说明
7.下面对本说明书各附图所表达的内容及图中的标记作简要说明:
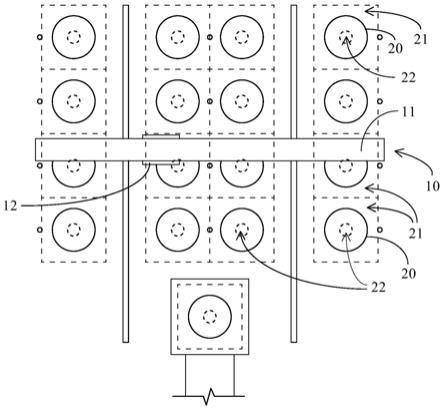
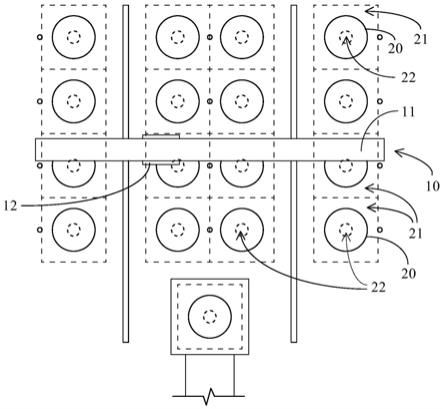
8.图1是本发明的俯视示意图;
9.图2是本发明的立面示意图;
10.图中:10.门式起重机,11.大车,12.小车,13.吊钩,20.渣包,21.渣包位,21a.当前渣包位,22.渣包位匹配区域。
具体实施方式
11.下面结合附图1、2,通过对实施例的描述,对本发明的具体实施方式作进一步详细说明。
12.一种缓冷场内渣包位状态的识别方法,本实施例采用门式起重机10转运渣包20。门式起重机10位移至目标位后,其大车11、小车12均处于停止状态时,将大车11、小车12的坐标与缓冷场内的渣包位21进行匹配,
13.若匹配失败,说明门式起重机10上小车12的当前停止位置偏离渣包位21,无法进行渣包20的转运作业,不会发生因渣包20转运导致的渣包位21状态变化,故而,待小车12下一次位移后停止时再次匹配;
14.若匹配成功,说明门式起重机10上小车12的当前停止位置位于渣包位21的操作范围内,能够进行渣包20的转运作业,故而,标记该渣包位21为当前渣包位21a,然后根据当前渣包位21a的历史状态和吊钩13的运行情况更新当前渣包位21a的状态。这样就能在门式起重机10进行渣包转运作业时,实时记录对应渣包位21的状态变化,从而保证渣包位状态的及时、准确同步,保障缓冷作业的安全可靠完成。
15.根据吊钩13上的载重情况,可分为无包、空包或满包。由于渣包20的材质、尺寸、形状固定,使得渣包20内承载有炉渣和空载时的重量也相对固定,故而,当吊钩13空载时,判定为空包状态,吊钩13上的载重与渣包20的重量相符时,判定为空包,吊钩13上的载重与渣包20满载炉渣时的重量相符时,判定为满包。
16.渣包位21包括如下四种状态:无包、空包、空冷、水冷。渣包位21内未放置渣包20时,判断为无包状态;渣包位21内放置的渣包20空置时,判定为空包状态;渣包位21内放置有渣包20且渣包20自然缓冷时,判定为空冷状态;渣包位21内放置有渣包20且冷却水喷淋渣包20时,判断为水冷状态。
17.所述的历史状态包括渣包位21最近一次更新的状态,定义渣包位21最近一次更新的状态为最近历史状态。渣包位21的初始状态为无包。
18.本实施例中,匹配成功后,首先根据当前渣包位21a的状态与吊钩13的载重情况,指导吊钩13动作。即步骤b11,若当前渣包位21a的状态不是无包状态,同时吊钩13的状态为空包或满包,限定吊钩13的最大下降位。避免吊挂有渣包20的吊钩13下降导致吊挂的渣包20与位于当前渣包位21a内的渣包20接触发生安全事故。
19.再根据当前渣包位21a的历史状态和喷淋水球阀的打开情况,更新当前渣包位21a的状态。即步骤b21,若当前渣包位21a的最近历史状态为空冷且其所对应的喷淋水球阀为打开状态,将当前渣包位21a的状态更新为水冷。更进一步的,渣包位21还包括缓冷完成状态。即步骤b21还包括,若当前渣包位21a的最近历史状态为水冷且其所对应的喷淋水球阀为闭合状态,将当前渣包位21a的状态更新为缓冷完成。
20.最后,根据吊钩13下降与上升时的载重情况,更新当前渣包位21a的状态。具体包括如下步骤,
21.b31、吊钩13下降时,记录吊钩13上的重量并标记吊钩13的下降状态;
22.b32、吊钩13上升时,记录吊钩13上的重量并标记吊钩13的上升状态;
23.b33、若吊钩13的下降状态与上升状态一致,则当前渣包位21a的状态不变;
24.若吊钩13的下降状态为无包、上升状态为空包或满包,则当前渣包位21a的状态更
新为无包;
25.若吊钩13的下降状态为空包、上升状态为无包,则当前渣包位21a的状态更新为空包;
26.若吊钩13的下降状态为满包、上升状态为无包,则当前渣包位21a的状态更新为空冷;
27.若吊钩13的下降状态、上升状态为其他情况,校准吊钩13的当前状态。
28.进一步的,结合吊钩13的下降状态和校准得到的当前状态,判定当前渣包位21a的状态。即步骤b33中,若吊钩13的下降状态、上升状态为其他情况,校准吊钩13的当前状态,进入步骤b41:
29.若吊钩13的下降状态为满包、校准后的当前状态为无包,则当前渣包位21a的状态更新为空冷;
30.若吊钩13的下降状态为满包、校准后的当前状态为满包,则当前渣包位21a的状态不变;
31.若吊钩13的下降状态为空包、校准后的当前状态为无包,则当前渣包位21a的状态更新为空包;
32.若吊钩13的下降状态为空包、校准后的当前状态为空包,则当前渣包位21a的状态不变。
33.更进一步的,若吊钩13的下降状态、校准后的当前状态为其他情况,结合吊钩13的当前状态、历史状态和当前渣包位21a的历史状态,人工判定当前渣包位21a的状态。此处历史状态包括吊钩12、渣包位21的状态更新记录。
34.在其他实施例中,在大车11、小车12的坐标与缓冷场内的渣包位21匹配成功后,可以省略步骤b11,直接进入步骤b21,或省略步骤b11、步骤b21,直接进入步骤b31。
35.在另一实施例中,可以采用如下方案替换步骤b21,即省略步骤b21,并在门式起重机10行驶过程中,采集信息并更新各渣包位21的状态。具体包括如下步骤:
36.在门式起重机10行驶过程中,安装在大车12上的测温探头30采集红外图像信息,结合大车支腿12的坐标信息获取途经渣包位21内渣包的温度值,结合渣包位21对应喷淋水阀的开闭情况更新渣包位21的状态;
37.当测得渣包位21内渣包的温度值低于水冷设定值时,若该渣包位21的最近历史状态为空冷其所对应的喷淋水球阀为关闭状态,打开该渣包位21的喷淋水球阀并将该渣包位21的状态更新为水冷;
38.当测得渣包位21内渣包的温度值低于缓冷设定值时,若该渣包位21的最近历史状态为水冷且其所对应的喷淋水球阀为开启状态,关闭该渣包位21的喷淋水球阀并将该渣包位21的状态更新为缓冷完成。
39.本实施例在对缓冷池内渣包位状态进行识别前,先驱动门式起重机10的大车11、小车12、吊钩13位移,依次采集并标记吊钩13位于缓冷场内各渣包位21中心点时大车11、小车12的坐标,根据该坐标得到各渣包位21的渣包位匹配区域22。在其他实施例中,也可以根据缓冷场的布置人为标记各渣包位21的渣包位匹配区域22。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。