技术特征:
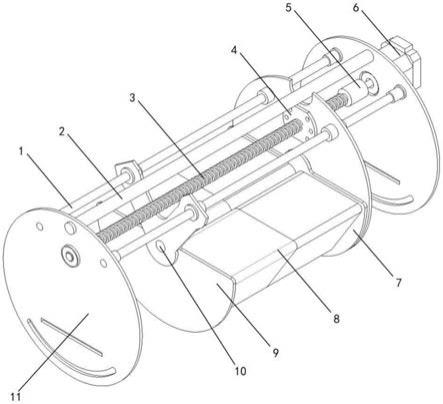
1.一种基于陀螺仪技术的飞行器自稳定装置,其特征在于,包括固定架、调节机构和驱动单元,所述调节机构包括丝杆(3)、连接架和配重块(8),所述丝杆(3)可转动安装在固定架上,所述配重块(8)固定在连接架的底部,所述连接架的顶部滑接在固定架上且与丝杆(3)螺纹连接,所述驱动单元固定在固定架上,所述驱动单元动力输出至丝杆(3)的一端。2.根据权利要求1所述的基于陀螺仪技术的飞行器自稳定装置,其特征在于,所述固定架包括第一固定板(11)、第二固定板(18)、第一光轴(1)和第二光轴(2),所述第一固定板(11)与第二固定板(18)平行且呈对称结构设置,所述第一固定板(11)与第二固定板(18)的内侧分别固定连接至第一光轴(1)和第二光轴(2)的端部,所述丝杆(3)两侧呈对称结构设置有两根第一光轴(1),所述丝杆(3)位于第二光轴(2)的正下方,所述连接架的顶部可滑动连接至第一光轴(1)。3.根据权利要求2所述的基于陀螺仪技术的飞行器自稳定装置,其特征在于,所述连接架包括中间移动板(15)和y型移动板(14),所述中间移动板(15)和y型移动板(14)的顶部两端分别滑动连接至两根第二光轴(1),所述配重块(8)的两侧固定连接至中间移动板(15)和y型移动板(14)的内侧壁,所述中间移动板(15)设有丝杆螺母(4),所述丝杆螺母(4)螺纹连接至丝杆(3)。4.根据权利要求3所述的基于陀螺仪技术的飞行器自稳定装置,其特征在于,所述驱动单元包括水平步进电机(6),所述水平步进电机(6)安装在第二固定板(18)的外侧壁,所述水平步进电机(6)的动力输出轴贯穿第二固定板(18)后通过联轴器(5)与丝杆(3)的一端固定连接,所述丝杆(3)的另一端通过旋转轴承(12)连接至第一固定板(11)的内侧壁。5.根据权利要求4所述的基于陀螺仪技术的飞行器自稳定装置,其特征在于,所述调节机构还包括第一半圆板(9)、第二半圆板(7)、涡轮(20)和蜗杆(22),所述配重块(8)呈半圆柱体结构,所述第一半圆板(9)、第二半圆板(7)分别呈对称结构固定在配重块(8)的两侧,所述第一半圆板(9)的轴心位置设有第一半圆板突出轴(10),所述第二半圆板(7)的轴心位置设有第二半圆板突出轴(16),所述第一半圆板突出轴(10)可转动连接至y型连接的底端,所述第二半圆板突出轴(16)可转动连接至中间移动板(15)的中心处,所述第一半圆板突出轴(10)贯穿中间移动板(15)后与涡轮(20)固定连接,所述蜗杆(22)与涡轮(20)啮合,所述驱动单元动力输出至蜗杆(22)。6.根据权利要求5所述的基于陀螺仪技术的飞行器自稳定装置,其特征在于,所述驱动单元还包括旋转步进电机(24),所述中间移动板(15)的外侧壁固定有步进电机支架(21),所述旋转步进电机(24)安装在步进电机支架(21),所述旋转步进电机(24)的动力输出端与蜗杆(22)的一端固定连接。7.根据权利要求6所述的基于陀螺仪技术的飞行器自稳定装置,其特征在于,所述第二半圆板(9)的外壁设置有限位轴(23),所述限位轴(23)位于第二半圆板(9)的圆心的正下方,所述中间移动板(15)上对应限位轴(23)设置有弧形限位槽(17)。8.一种用于控制权利要求1
‑
7任意一项所述基于陀螺仪技术的飞行器自稳定装置的控制系统,其特征在于,包括陀螺仪模组,包括安装在飞行器各部位的若干陀螺仪,用于采集飞行器的实际飞行参数数据;定时器模块,用于对陀螺仪模组采集的实际飞行参数数据进行高频采样;
陀螺仪数据处理模块,用于对采样的实际飞行参数数据进行处理;数据存储模块,用于存储经陀螺仪数据处理模块处理后的实际飞行参数数据,另外还存储有飞行器的给定飞行参数数据,以及驱动单元运行的关系式数据;陀螺仪数据转换模块,用于读取数据存储模块中经处理后的实际飞行参数数据以及给定飞行参数数据,并进行比对,进而得到实际飞行参数数据与给定飞行参数数据的偏差值,最后存储至数据存储至数据存储模块;配重方案实时计算模块,用于实时读取数据库中实际飞行参数数据与给定飞行参数数据的偏差值以及驱动单元运行的关系式数据,得到驱动单元的运行参数;pid控制模块,用于接收配重方案实时计算模块计算得到的驱动单元的运行参数,进而输出控制信号驱动单元;驱动单元,接收到控制信号后驱动调节机构运行。9.根据权利要求8所述的基于陀螺仪技术的飞行器自稳定装置,其特征在于,所述实际飞行参数数据与给定飞行参数数据的偏差值包括偏移量、偏移速度和偏移加速度。10.一种飞行器,包括权利要求1
‑
7任意一项所述的基于陀螺仪技术的飞行器自稳定装置。
技术总结
本发明公开了一种基于陀螺仪技术的飞行器自稳定装置,包括固定架、调节机构和驱动单元,所述调节机构包括丝杆、连接架和配重块,所述丝杆可转动安装在固定架上,所述配重块固定在连接架的底部,所述连接架的顶部滑接在固定架上且与丝杆螺纹连接,所述驱动单元固定在固定架上,所述驱动单元动力输出至丝杆的一端,协同考虑硬件资源和软件资源的需求,解决了稳定调节精度差和现有控制方法性能差的问题,使飞行器在受到气流影响时能够快速、精准的自动调整重心的位置,使飞行器安全的恢复到稳定运行状态。行状态。行状态。
技术研发人员:杨楠 龚友平 赵鹏
受保护的技术使用者:杭州电子科技大学
技术研发日:2021.10.14
技术公布日:2021/12/14
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。