1.本实用新型属于物位检测技术领域,具体涉及一种粉体物位间歇测量控制装置。
背景技术:
2.目前,对于开口容器的物位测量,在没有可靠测量仪器时,大多采用最原始、最古老的办法,就是利用绳索或者皮尺悬吊重物放到料仓内进行就地测量,测量方法虽然原始,但测量的数据真实性比较准确。对于长期需要运行的检测设备,利用人工进行监测增加了测量的劳动强度,达不到持续在线测量监控的目的。
3.现阶段,国内使用得较多的料位计测量装置为雷达料位计,其原理是利用雷达料位计天线发出微波脉冲信号,在被测物料表面产生反射,天线接收反射的微波脉冲将其传输给接收电路,微处理器对此信号进行处理,识别出微波脉冲在物料表面所产生的回波,并被雷达系统所接收,经过反馈的微波信号计算出料位的距离进行显示。然而雷达料位计对界线分层清晰的物位测量比较准确,例如:水位、油位、酸碱液位、房屋高度、水井深度等物位测量准确,但对煤粉、粉煤灰、水泥、矿粉等漂浮弥漫在空中的分界点不明朗的粉尘物料,界限不明,不易分辨,导致料位测量失准。另外,现有技术还存在其它测量方式,如:e h雷达导波料位计;超声波测量料位计;vega(天津天威)的导波雷达料位仪等。
4.然而,不管是导波雷达,还是超声波测量都存在以下几个问题:
①
非接触式料位计的测量装置都有一个共性,传感器无法克服现场环境对测量结果带来的真实性判断,特别是无法克服粉尘的漂浮、粘附、浓度对探头测量结果的影响;
②
无法准确标定物位的真实准确性;
③
对仓位堆放不规则,有高有低,有平有斜坡,影响了反射波的测量与接收,
④
现有测量物位仪器设备价位高,对漂浮物测量检测的可靠程度不能真实反映物料的准确性。
技术实现要素:
5.为此,本实用新型提供一种粉体物位间歇测量控制装置,解决因粉尘漂浮弥漫在空中分界点的悬浮不确定性,常规料位测量仪器探测不清料位的分界点,导致物位测量失准的问题。
6.为了实现上述目的,本实用新型提供如下技术方案:一种粉体物位间歇测量控制装置,包括料仓,所述料仓的顶部连接有隔板,还包括控制电机、绕线轮盘、计数转动轮、定向滑轮、重力检测杠杆、下降检测探头和上升检测探头;所述绕线轮盘连接所述控制电机的动力轴,绕线轮盘缠绕有绳索;所述绳索依次绕过所述计数转动轮和定向滑轮,绳索穿过所述隔板并伸入所述料仓的内部,绳索的末端连接有重锤;所述重力检测杠杆的一端连接所述定向滑轮;所述下降检测探头紧靠在所述重力检测杠杆的另外一端上方,下降检测探头用于进行绳索的行程控制;所述上升检测探头布置在所述绳索的一侧,上升检测探头用于进行控制电机的启停。
7.作为粉体物位间歇测量控制装置的优选方案,还包括控制器,所述控制器通过数据信号线分别与所述控制电机、下降检测探头和上升检测探头电连接。
8.作为粉体物位间歇测量控制装置的优选方案,所述下降检测探头内部设有弹簧支撑触点,所述弹簧支撑触点用于根据重锤接触到料仓内物体表面后重力的减轻来控制下降检测探头信号的通与断。
9.作为粉体物位间歇测量控制装置的优选方案,所述控制器设有重力感应传感器,所述重力感应传感器用于对重锤接触到料仓内物体表面进行识别。
10.作为粉体物位间歇测量控制装置的优选方案,还包括显示仪表,所述显示仪表与所述控制器电连接,显示仪表用于显示料仓内的物位高度。
11.作为粉体物位间歇测量控制装置的优选方案,所述计数转动轮连接有检测转换传感器,所述检测转换传感器与所述显示仪表之间电连接,检测转换传感器用于将计数转动轮的转动转换为绳索的移动距离。
12.作为粉体物位间歇测量控制装置的优选方案,所述控制器配置有逻辑比较电路,所述逻辑比较电路包括集成器件ic1和集成器件ic2,集成器件ic1和集成器件ic2采用555双极型集成器件。
13.作为粉体物位间歇测量控制装置的优选方案,所述逻辑比较电路还包括电机下降集成控制电路、电机下降控制回路、电机上升集成控制电路和电机上升控制回路。
14.作为粉体物位间歇测量控制装置的优选方案,所述逻辑比较电路还包括清零控制电路,所述清零控制电路用于将测量显示结果清零。
15.作为粉体物位间歇测量控制装置的优选方案,所述重力检测杠杆的下端连接有转动支撑点。
16.本实用新型具有如下优点:设有控制电机、绕线轮盘、计数转动轮、定向滑轮、重力检测杠杆、下降检测探头和上升检测探头;绕线轮盘连接控制电机的动力轴,绕线轮盘缠绕有绳索;绳索依次绕过计数转动轮和定向滑轮,绳索穿过隔板并伸入料仓的内部,绳索的末端连接有重锤;重力检测杠杆的一端连接定向滑轮;下降检测探头紧靠在重力检测杠杆的另外一端上方,下降检测探头用于进行绳索的行程控制;上升检测探头布置在绳索的一侧,上升检测探头用于进行控制电机的启停。本实用新型不受粉尘漂浮、浓度、湿度及煤层环境的影响,直接触及被测量介质的界面进行直接测量,可提供准确的物位测量数据,克服了环境因素的影响对粉体物位测量不准确的缺陷;实现自动控制方式,持续更新并显示当前物位的高度,随时掌握煤仓煤位运行情况,为现场人员提供准确可靠依据;便于提醒值班人员随时准备上料和停料提供依据保障,避免空仓、满仓事故的发生;检测探头触及物体表面后立即自动提升,避免被物料进料或堆积物料垮塌淹埋探头的风险;实现物位检测前数据自动清零的控制电路,避免了将上次测量结果累积叠加到本次的数据中,使得每一次测得的结果都是独立的数据,与前后所测的数据没有任何干扰;能够设置不同时间间隔时段的间歇测量,可任意设定从几秒钟测量一次到十几分钟测量一次,可供多个时间点的控制选用,运行人员随时根据现场需要测量数据的方便自由选择;每次下降得出的测量显示结果与上升测量显示结果数值基本一致,符号相反,达到上升与下降的测量检测数据自动校正的目的。
附图说明
17.为了更清楚地说明本实用新型的实施方式或现有技术中的技术方案,下面将对实
施方式或现有技术描述中所需要使用的附图作简单地介绍。显而易见地,下面描述中的附图仅仅是示例性的,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据提供的附图引伸获得其它的实施附图。
18.本说明书所绘示的结构、比例、大小等,均仅用以配合说明书所揭示的内容,以供熟悉此技术的人士了解与阅读,并非用以限定本实用新型可实施的限定条件,故不具技术上的实质意义,任何结构的修饰、比例关系的改变或大小的调整,在不影响本实用新型所能产生的功效及所能达成的目的下,均应仍落在本实用新型所揭示的技术内容能涵盖的范围内。
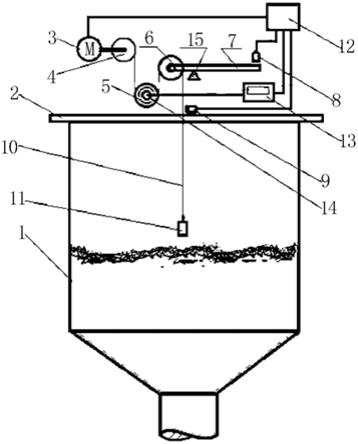
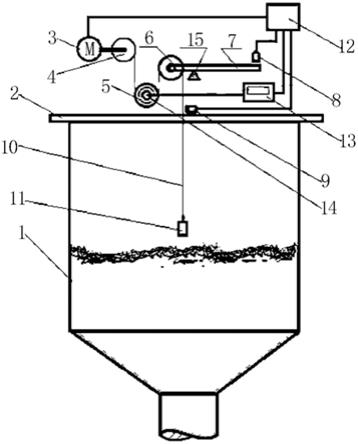
19.图1为本实用新型实施例中提供的粉体物位间歇测量控制装置结构示意图;
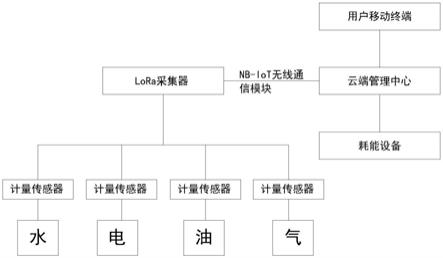
20.图2为本实用新型实施例中提供的粉体物位间歇测量控制装置电路原理框图;
21.图3为本实用新型实施例中提供的粉体物位间歇测量控制装置电路图。
22.图中,1、料仓;2、隔板;3、控制电机;4、绕线轮盘;5、计数转动轮;6、定向滑轮;7、重力检测杠杆;8、下降检测探头;9、上升检测探头;10、绳索;11、重锤;12、控制器;13、显示仪表;14、检测转换传感器;15、转动支撑点。
具体实施方式
23.以下由特定的具体实施例说明本实用新型的实施方式,熟悉此技术的人士可由本说明书所揭露的内容轻易地了解本实用新型的其他优点及功效,显然,所描述的实施例是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
24.参见图1,提供一种粉体物位间歇测量控制装置,包括料仓1,所述料仓 1的顶部连接有隔板2,还包括控制电机3、绕线轮盘4、计数转动轮5、定向滑轮6、重力检测杠杆7、下降检测探头8和上升检测探头9;所述绕线轮盘4 连接所述控制电机3的动力轴,绕线轮盘4缠绕有绳索10;所述绳索10依次绕过所述计数转动轮5和定向滑轮6,绳索10穿过所述隔板2并伸入所述料仓1的内部,绳索10的末端连接有重锤11;所述重力检测杠杆7的一端连接所述定向滑轮6,重力检测杠杆7的下端连接有转动支撑点15;所述下降检测探头8紧靠在所述重力检测杠杆7的另外一端上方,下降检测探头8用于进行绳索10的行程控制;所述上升检测探头9布置在所述绳索10的一侧,上升检测探头9用于进行控制电机3的启停。
25.本实施例中,还包括控制器12,所述控制器12通过数据信号线分别与所述控制电机3、下降检测探头8和上升检测探头9电连接。所述下降检测探头 8内部设有弹簧支撑触点,所述弹簧支撑触点用于根据重锤11接触到料仓1 内物体表面后重力的减轻来控制下降检测探头8信号的通与断。所述控制器 12设有重力感应传感器,所述重力感应传感器用于对重锤11接触到料仓1内物体表面进行识别。
26.本实施例中,还包括显示仪表13,所述显示仪表13与所述控制器12电连接,显示仪表13用于显示料仓1内的物位高度。所述计数转动轮5连接有检测转换传感器14,所述检测转换传感器14与所述显示仪表13之间电连接,检测转换传感器14用于将计数转动轮5的转动转换为绳索10的移动距离。
27.具体的,本实用新型的工作过程如下:
28.所测物料全部存储在料仓1内,将测量控制装置固定在料仓1顶部隔板2 上,利用绳索10一端悬吊重锤11,作为前端探测接触到物位的感应探头,绳索10的另一端固定在控制电机3的绕线轮盘4上,通过控制电机3旋转带动绳索10跨接的计数转动轮5和定向滑轮6的转动来测量绳索10的长度,而定向滑轮6又固定在重力检测杠杆7上,并以转动支撑点15进行重力检测杠杆 7的转动支撑。下降检测探头8紧靠在重力检测杠杆7的另一端,下降检测探头8为行程开关,依靠内部的弹簧支撑触点进行闭合与断开,从而将重锤11 接触到物体表面后重力的减轻来控制行程开关信号的通与断。
29.当绳索10旋放的重锤11接触到物体表面后,利用绳索10悬吊重锤11的重力,根据控制器12上安装的重力感应传感器可以自动识别出重锤11是否接触物体的表面,当重锤11接触到物体表面后自动控制电机3提升绳索10,到达上升检测探头9的规定位置后自动控制电机3停止。计数转动轮5上装有检测转换传感器14,数据信号线连接控制器12、检测转换传感器14以及显示仪表13,最终通过传输、转换、控制将当前测量的物位高度显示出来。
30.具体的,本实用新型设计有清零控制电路,当定时间歇测量时间一到,测量装置自动将上次测量显示结果自动清零,同时启动控制电机3将重锤11从料仓1规定的位置往下旋放绳索10,并开始计数旋放绳索10的长度,当重锤 11接触到物体表面后,仪表显示出当前下降的测量结果为负值,即刻后自动将下降的测量显示结果自动清零,马上控制电机3自动提升绳索10,又重新计数绳索10上升的长度,当提升绳索10到达上升检测探头9规定位置后自动停止到下一次定时间歇测量的间隔,此时显示仪表13显示的测量结果也一直保留到下一次定时间歇测量时间才重新刷新,显示的测量结果为正值,下降与上升的测量结果数值一致,数值得到相互验证,仅符号相反,进而实现利用绳索10旋放的长度达到物位测量显示结果的目的。
31.本实施例中,所述控制器12配置有逻辑比较电路,所述逻辑比较电路包括集成器件ic1和集成器件ic2,集成器件ic1和集成器件ic2采用555双极型集成器件。所述逻辑比较电路还包括电机下降集成控制电路、电机下降控制回路、电机上升集成控制电路和电机上升控制回路。所述逻辑比较电路还包括清零控制电路,所述清零控制电路用于将测量显示结果清零。
32.具体的,集成器件ic1和集成器件ic2主要包含一个r
‑
s触发器,两个电压比较器a1和a2,一个npn型三极管和三个等值电阻,这三个电阻对电源 u
cc
分压后,分别得到2u
cc
/3和u
cc
/3的电压加到比较器a1的同相输入端和比较器a2的反相输入端,其逻辑状态表如下:
33.34.参见图2和图3,根据以上逻辑表,设计出适用于物位控制的逻辑电,以下符号中:i代表电路框、r代表电阻、g代表常闭行程开关、c代表电容、f 代表保险、bg代表三极管、gk代表无触点固态继电器;电子元件符号后面的数字对不同的电子元件区分,此种表示方式为本领域技术人员知悉的惯用手段。
35.由电路i1、i2、i5、i7、i10、i11、常闭行程开关g1、g2和电容c1 构成电机下降集成控制电路;其中i1由r1、f1、c1、r3组成比较器的同向输入端;i2由r2、f2、c2、r4组成比较器的反向输入端;经i5的ic1集成器件电路比较逻辑判断后输出至i7,i7由r5、bg1、gk1组成下降控制回路, gk1采用无触点固态继电器,增强了装置的动作可靠性,克服常规继电器接点疲劳易烧结以及接触不良的问题;由g2、i10、i11及电容c5构成定时换挡触发控制电路,i10为74hc4060,14位二进制串行分频计数器,时间频率由连接在ic3集成器件上的第9、10、11脚中r6、c4进行调整,i11为多档时间切换开关。
36.同理,由i3、i4、i6、i8及常闭行程开关g2、常开行程开关g1和c9构成电机上升集成控制电路;i3由r7、f3、c6、r9组成比较器的同向输入端; i4由r8、f4、c7、r10组成比较器的反向输入端;经i6的ic2集成电路比较逻辑判断后输出至i8,i8由r11、bg2、gk2组成上升控制回路,gk2采用无触点固态继电器。由常开行程开关g1、电容c9构成瞬间触发控制电路,当重锤11触及物体表面16时,立即停止电机下降,并瞬间自动触发控制电路上升,防止被下落的物料堆积积压或被物料突然垮塌压埋重锤11,难以提升重锤11。由c10及gk1与gk2的组成的电路分别控制电机3的升、降和停止三种状态。i9分别由r13、d1和r14、d2构成或门,然后通过bg3、c11、 c12组成清零控制电路,送至显示仪表13的清零端。控制电机3带动绳索10 绕线轮盘4的旋转,同时带动跨接在d上的轮盘转动,将脉冲信号送至显示仪表13的ic12j接线端子,每转动一个毫米便发一个脉冲信号,从而将长度转换成计数脉冲信号,通过显示仪表13显示出来。虚线框内的i12、i13、i14、 i15、i16、i17为显示仪表13的内部组件,主要有接线端子i12;脉冲整形电路i13;报警设置电路i14;双时钟可预置可逆计数器i15;bcd
‑
锁存
‑
译码
‑ꢀ
驱动电路i16;数码显示i17等,目前数码显示电路的应用比较成熟和广泛,不属本实用新型关注的重点。
37.综上所述,本实用新型设有控制电机3、绕线轮盘4、计数转动轮5、定向滑轮6、重力检测杠杆7、下降检测探头8和上升检测探头9;绕线轮盘4 连接控制电机3的动力轴,绕线轮盘4缠绕有绳索10;绳索10依次绕过计数转动轮5和定向滑轮6,绳索10穿过隔板2并伸入料仓1的内部,绳索10的末端连接有重锤11;重力检测杠杆7的一端连接定向滑轮6;下降检测探头8 紧靠在重力检测杠杆7的另外一端上方,下降检测探头8用于进行绳索10的行程控制;上升检测探头9布置在绳索10的一侧,上升检测探头9用于进行控制电机3的启停,控制器12配置有逻辑比较电路,逻辑比较电路包括集成器件ic1和集成器件ic2,集成器件ic1和集成器件ic2采用555双极型集成器件。逻辑比较电路还包括电机下降集成控制电路、电机下降控制回路、电机上升集成控制电路和电机上升控制回路。逻辑比较电路还包括清零控制电路,清零控制电路用于将测量显示结果清零。本实用新型不受粉尘漂浮、浓度、湿度及煤层环境的影响,直接触及被测量介质的界面进行直接测量,可提供准确的物位测量数据,克服了环境因素的影响对粉体物位测量不准确的缺陷;实现自动控制方式,持续更新并显示当前物位的高度,随时掌握煤仓煤位运行情况,为现场人员提供准确可靠依据;便于提醒值班人员随时准备上料和停料提供依据保障,避免空仓、满仓事故的发生;检测探头触及物
体表面后立即自动提升,避免被物料进料或堆积物料垮塌淹埋探头的风险;实现物位检测前数据自动清零的控制电路,避免了将上次测量结果累积叠加到本次的数据中,使得每一次测得的结果都是独立的数据,与前后所测的数据没有任何干扰;能够设置不同时间间隔时段的间歇测量,可任意设定从几秒钟测量一次到十几分钟测量一次,可供多个时间点的控制选用,运行人员随时根据现场需要测量数据的方便自由选择;每次下降得出的测量显示结果与上升测量显示结果数值基本一致,符号相反,达到上升与下降的测量检测数据自动校正的目的。
38.虽然,上文中已经用一般性说明及具体实施例对本实用新型作了详尽的描述,但在本实用新型基础上,可以对之作一些修改或改进,这对本领域技术人员而言是显而易见的。因此,在不偏离本实用新型精神的基础上所做的这些修改或改进,均属于本实用新型要求保护的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。