1.本发明涉及图像处理领域,尤其涉及一种气动光学效应空变模糊图像不均匀分块的图像复原方法及系统。
背景技术:
2.高速飞行器在输送人员/货物、观察场景、探测目标方面有着快速反应的高时效性和可供探测更大区域的高覆盖率的优点,因而在科技、经济、社会发展和国家安全领域具有广泛的应用价值。飞行器在大气层内飞行时,因与周围空气的相对运动和相互作用,产生气动流场,使飞行器光学成像探测系统功能丧失的物理过程和效果,称为气动光学效应。所以,要解决高品质的成像探测与导航定位问题,以及如何抵消或减轻高速飞行条件下气动光学效应的不利影响是高速飞行器航空航天技术发展的重要方向。
3.在空间可变的湍流退化模糊核的模拟退化仿真与恢复算法方面,相关工作较少,传统研究都是对于图像近似空不变的方面研究难以满足实时性与真实性的要求,如宽视场、复杂湍流等,近年来最新提出的分块方式的复原主要是在均匀分块的基础上进行滤波处理以及模糊核估计,但是一幅湍流空变模糊图像的分块复原导致了目标区域被割裂之后复原程度的差异,因此有必要针对气动光学效应空变图像自适应不均匀分块以及其空变模糊核估计的空变图像复原方法开展研究。
技术实现要素:
4.本发明要解决的技术问题在于针对现有方法中的不能估计气动光学效应空变图像的模糊核问题以及对于空变模糊图像难复原问题,提供一种气动光学效应空变模糊图像自适应不均匀分块及其空变模糊核估计的图像复原方法。
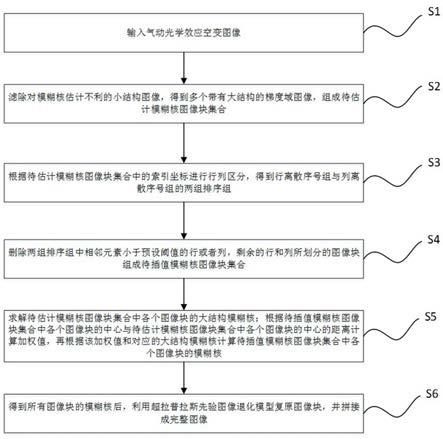
5.为达上述目的,本发明提供了一种气动光学效应空变模糊图像不均匀分块的图像复原方法,包括以下步骤:s1、输入气动光学效应空变图像;s2、滤除对模糊核估计不利的小结构图像,得到多个带有大结构的梯度域图像,组成待估计模糊核图像块集合;s3、根据待估计模糊核图像块集合中的索引坐标进行行列区分,得到行离散序号组与列离散序号组的两组排序组;s4、删除两组排序组中相邻元素小于预设阈值的行或者列,剩余的行和列所划分的图像块组成待插值模糊核图像块集合;s5、求解待估计模糊核图像块集合中各个图像块的大结构模糊核;根据待插值模糊核图像块集合中各个图像块的中心与待估计模糊核图像块集合中各个图像块的中心的距离计算加权值,再根据该加权值和对应的大结构模糊核计算待插值模糊核图像块集合中各个图像块的模糊核;s6、得到所有图像块的模糊核后,利用超拉普拉斯先验图像退化模型复原图像块,
并拼接成完整图像。
6.接上述技术方案,步骤s2中具体利用梯度有用性方法滤除对模糊核估计不利的小结构图像。
7.接上述技术方案,步骤s2中,待估计模糊核图像块集合中每个图像块的区域位置通过矩形坐标形式确定:通过矩形坐标形式确定:为矩形坐标,与分别是矩形的左上顶点和右下顶点的像素坐标;矩形的上边起始行为第行,左边起始列为第列,下边终止行为第行,右边终止列为第列。
8.接上述技术方案,步骤s3中,按照升序排列得到行离散序号组与列离散序号组的两组排序组。
9.接上述技术方案,步骤s4中,相邻元素的预设阈值根据图像大小和模糊核矩阵大小确定。
10.接上述技术方案,步骤s4中,取两组排序组中相邻元素组合,依据相邻两元素不小于预设阈值进行筛选。
11.接上述技术方案,步骤s5具体为:利用基于空间相关约束的非负性最小二乘准则估算方法对待估计模糊核图像块集合进行模糊核的估算;根据待估计模糊核图像块的模糊核,利用线性插值方法,求得待插值模糊核图像块的模糊核;其中,线性点插值建模成基于欧氏距离的点插值计算:点插值建模成基于欧氏距离的点插值计算:为待插值模糊核图像块求解的模糊核,为待估计模糊核图像块求解的模糊核,为任意一个待插值模糊核图像块的中心点与第个待估计模糊核图像块的中心点的欧氏距离,、均为自然数。
12.接上述技术方案,步骤s6中,图像块拼接时,先对图像块进行拓展,再使用加权插值融合图像块的边界。
13.本发明还提供一种气动光学效应空变模糊图像不均匀分块的图像复原系统,包括:图像输入模块,用于输入气动光学效应空变图像;待估计模糊核图像块获取模块,用于滤除对模糊核估计不利的小结构图像,得到多个带有大结构的梯度域图像,组成待估计模糊核图像块集合;待插值模糊核图像块获取模块,用于根据待估计模糊核图像块集合中的索引坐标进行行列区分,得到行离散序号组与列离散序号组的两组排序组;删除两组排序组中相邻元素小于预设阈值的行或者列,剩余的行和列所划分的图像块组成待插值模糊核图像块集
合;模糊核求解模块,用于求解待估计模糊核图像块集合中各个图像块的大结构模糊核;根据待插值模糊核图像块集合中各个图像块的中心与待估计模糊核图像块集合中各个图像块的中心的距离计算加权值,再根据该加权值和对应的大结构模糊核计算待插值模糊核图像块集合中各个图像块的模糊核;复原模块,用于在得到所有图像块的模糊核后,利用超拉普拉斯先验图像退化模型复原图像块,并拼接成完整图像。
14.本发明还提供一种计算机存储介质,其可被处理器执行,其内存储有计算机程序,该计算机程序执行上述技术方案所述的气动光学效应空变模糊图像不均匀分块的图像复原方法。
15.本发明产生的有益效果是:本发明的气动光学效应空变模糊图像自适应不均匀分块及其空变模糊核估计的图像复原方法,能够框定有效信息区域进行重点估计复原,在此基础上进行自适应不均匀分块与线性插值估计模糊核进一步提高效率;区别于以往的直接划分区域的局限性与全体估计模糊核的耗时,能够满足在多目标,复杂的宽视场湍流场景下的复原工作。
附图说明
16.下面将结合附图及实施例对本发明作进一步说明,附图中:图1为本发明实施例气动光学效应空变模糊图像不均匀分块的图像复原方法的流程图;图2为原始气动光学效应空变模糊图片;图3为模糊核区域测度下多梯度图片;图4为待估计模糊核多区域图片;图5为自适应不均匀分块图片;图6为待估计模糊核图像块多区域的模糊核图片;图7为自适应不均匀分块区域点插值生成的模糊核图片;图8为图像各块拼接恢复整体图像。
具体实施方式
17.为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本发明,并不用于限定本发明。
18.本发明实施气动光学效应空变模糊图像不均匀分块的图像复原方法,可使用c/c 语言编写,如图1所示,包括以下步骤:s1、输入气动光学效应空变图像;s2、滤除对模糊核估计不利的小结构图像,得到多个带有大结构的梯度域图像,组成待估计模糊核图像块集合;s3、根据待估计模糊核图像块集合中的索引坐标进行行列区分,得到行离散序号组与列离散序号组的两组排序组;
s4、删除两组排序组中相邻元素小于预设阈值的行或者列,剩余的行和列所划分的图像块组成待插值模糊核图像块集合;s5、求解待估计模糊核图像块集合中各个图像块的大结构模糊核;根据待插值模糊核图像块集合中各个图像块的中心与待估计模糊核图像块集合中各个图像块的中心的距离计算加权值,再根据该加权值和对应的大结构模糊核计算待插值模糊核图像块集合中各个图像块的模糊核;s6、得到所有图像块的模糊核后,利用超拉普拉斯先验图像退化模型复原图像块,并拼接成完整图像。
19.进一步地,步骤s2中具体可以通过基于加权测度的模糊核估计区域估计得到梯度图像:其中,为输入图像,为尺度大小,,是尺度为的图像结构元素,和分别表示膨胀和腐蚀运算。
20.梯度有用性滤除对模糊核估计不利的小结构图像:梯度有用性滤除对模糊核估计不利的小结构图像:梯度有用性滤除对模糊核估计不利的小结构图像:表示范数,是以中心的长宽均为的矩形邻域,;为邻域内的像素,;分母中的常数设为,阈值设为0.1。
21.滤除平坦区域和纹理小结构区域后,使用加权范数模糊核估计区域测度,确定该区域包含有图像内容:其中,为像素点设定的连通量的阈值,本发明实施例中设为3,为像素连通域的有效值,表示像素8邻域的连通量,如下表1所示。
22.表1:像素点(i,j)的8邻域(i
‑
1,j
‑
1)(i
‑
1,j)(i
‑
1,j 1)(i,j
‑
1)(i,j)(i,j 1)(i 1,j
‑
1)(i 1,j)(i 1,j 1)如图3所示,图3说明了该模糊图像的大结构区域共有5块,存在重叠区域、相隔过近和相邻边重合的复杂情况。使用区域测度定位的多个图像区域位置通常可以通过矩形坐
标形式确定下来:标形式确定下来:为矩形坐标,与分别是矩形的左上顶点和右下顶点的像素坐标;矩形的上边起始行为第行,左边起始列为第列,下边终止行为第行,右边终止列为第列。
23.为矩形坐标,坐标与分别是的左上顶点像素和右下顶点的像素;每个像素的坐标表明了所处的位置信息,中的坐标组代表上边起始行为第行,左边起始列为第列,下边终止行为第行,右边终止列为第列的图像区域。当区域测度定位的图像区域不止一个的时候,将这些区域统称为待估计模糊核图像块集合,其矩形坐标形式集合为:。
24.步骤s3中,依据上一步得到的5块大结构区域,可以知道其对应的矩形坐标,按图索冀得到的是如图4所示的带有信息的图像块。可按照升序排列得到行离散序号组与列离散序号组的两组排序组。待估计模糊核图像块集合的坐标组集合可表示为:散序号组的两组排序组。待估计模糊核图像块集合的坐标组集合可表示为:代表待估计模糊核图像块的坐标组集合,表示为起始行,表示为终止行,表示为起始列,表示为终止列,行相关放置为一组,列相关放置为一组::中新元素0表示图像起始行第0行,表示图像终止行第行,中新元素0表示图像起始行第0列,399表示图像终止行第399列。
25.将、中的元素按照升序排列:。
26.进一步地,步骤s4中,相邻元素的预设阈值根据图像大小和模糊核矩阵大小确定。可以根据图像和模糊核尺寸,确定出两组排序组中相邻元素的最小阈值。
27.图像尺寸为616*400,模糊核矩阵块大小设定为21*21(通常设定范围为3~27且为
奇数),为阈值率,取0.09,相邻元素的最小阈值具体方式为:待插值模糊核图像块的坐标组集合公式为:剩余行、列组成的待插值图像块如图5所示。
28.图6为重点带有信息图像块的估算出的5块模糊核,图中显示了5块模糊核的放大效果与3d显示。待估计模糊核图像块求解模糊核的过程为:待估计模糊核图像块模糊核的估计,利用现有基础使用基于空间相关约束的非负性最小二乘准则估算:负性最小二乘准则估算:表示模糊核矩阵中的元素,采用滞后迭代极小化算法求解,令目标函数导数为零解得:待插值模糊核图像块的模糊核利用采用线性插值方法求解:图7是基于估算出5块模糊核的基础上线性插值生成的31个模糊核,减少了计算量。图7中选取了其中10个模糊核的放大截图与3d显示。
29.进一步地,步骤s6使用了超拉普拉斯先验图像退化模型求解复原图像块,模型如下:
为控制正则化输出的权重,为已知模糊核,为模糊图;为基于超拉普拉斯的算子先验。
30.通过反卷积恢复获得的复原图像,可以表示为以下式子,给定前一次迭代得到的的固定值。最优解可以表示为:式中为卷积矩阵,采用2维fftw对卷积矩阵进行处理,得到的最优解:其中为复数共轭,为对应元素乘法运算符,和快速傅里叶变换及其反变换。
31.图像块拼接融合具体方法为:拼接融合具体方法为:为两图像块拓展宽度,取值为5,与是两个不同图像块,元素的拓展不超过图像整体范围,即,为确保各图像块之间的边界处连续,使用定量权重融合:使用定量权重融合:为复原完整图像,、为图像块, 表示待插值模糊核图像块坐标组集合中的具有宽度的边界区域,为加权系数,取值为0.6。图8为复原待估计图像块区域后,剩余部分经过拓展拼接融合成的完整图像。
32.上述实施例可在windows10操作系统上,在visual c 6.0平台上编程代码。本发明的上述例子中,对windows10的硬件配置做一下说明:(1)、运行内存为8g,处理器为inter core i5;(2)、利用c/c 平台的mfc搭建算法框架。
33.本发明还提供了一种气动光学效应空变模糊图像不均匀分块的图像复原系统,包括:图像输入模块,用于输入气动光学效应空变图像;待估计模糊核图像块获取模块,用于滤除对模糊核估计不利的小结构图像,得到多个带有大结构的梯度域图像,组成待估计模糊核图像块集合;待插值模糊核图像块获取模块,用于根据待估计模糊核图像块集合中的索引坐标进行行列区分,得到行离散序号组与列离散序号组的两组排序组;删除两组排序组中相邻元素小于预设阈值的行或者列,剩余的行和列所划分的图像块组成待插值模糊核图像块集合;模糊核求解模块,用于求解待估计模糊核图像块集合中各个图像块的大结构模糊核;根据待插值模糊核图像块集合中各个图像块的中心与待估计模糊核图像块集合中各个图像块的中心的距离计算加权值,再根据该加权值和对应的大结构模糊核计算待插值模糊核图像块集合中各个图像块的模糊核;复原模块,用于在得到所有图像块的模糊核后,利用超拉普拉斯先验图像退化模型复原图像块,并拼接成完整图像。
34.各个模块具体用于实现上述实施例方法中的各个步骤,在此不赘述。
35.本发明还提供一种计算机可读存储介质,如闪存、硬盘、多媒体卡、卡型存储器(例如,sd或dx存储器等)、随机访问存储器(ram)、静态随机访问存储器(sram)、只读存储器(rom)、电可擦除可编程只读存储器(eeprom)、可编程只读存储器(prom)、磁性存储器、磁盘、光盘、服务器、app应用商城等等,其上存储有计算机程序,程序被处理器执行时实现相应功能。本实施例的计算机可读存储介质用于被处理器执行时实现上述方法实施例的气动光学效应空变模糊图像不均匀分块的图像复原方法。
36.应当理解的是,对本领域普通技术人员来说,可以根据上述说明加以改进或变换,而所有这些改进和变换都应属于本发明所附权利要求的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。