1.本发明涉及平衡车领域,具体为一种人机互动转换控制方法。
背景技术:
2.电动平衡车,又叫体感车、思维车、摄位车等。市场上主要有独轮和双轮两类,其利用车体内部的陀螺仪和加速度传感器,来检测车体姿态的变化,并利用伺服控制系统,精确地驱动电机进行相应的调整,以保持系统的平衡。是现代人用来作为代步工具、休闲娱乐的一种新型的绿色环保的产物。
3.传统平衡车不具备撞击保护的功能,当行驶中的平衡车与路石或异物发生接触撞击时,平衡车仍会持续工作,此时用户会因为撞击而出现平衡失控的情况,极易从平衡车上摔下,存在一定的安全隐患,同时传统平衡车在倾斜角度过大时仍可持续运转,此时极易造成用户从平衡车上滑落的情况,使得传统平衡车的安全系数较低。
技术实现要素:
4.本发明的目的在于提供一种人机互动转换控制方法,以解决上述背景技术中提出的问题。
5.为实现上述目的,本发明提供如下技术方案:一种人机互动转换控制方法,控制方法步骤为:第一步,用户短按开关键,使平衡车开启、电池开始供电,同时内部压力传感器与控制器通电启动,电量指示灯亮绿灯;第二步,再次长按开关键,进入平衡车平衡调试状态,首先报警器进行声音警示,平衡车此时进入平衡调试状态,在整个调试过程中侧灯条灯光闪烁多次,控制器内预设有灯光闪烁次数,闪烁完毕后,整机平衡调试状态完成;第三步,当用户站立在平衡车的踏板上方,用户双脚对分别设置在踏板下方的压力传感器产生压力,而后平衡车自动开启慢速直线行驶的安全模式;安全模式结束后,平衡车进入可与用户进行互动的自控制模式,根据用户双脚通过踏板对压力传感器产生的不同压力,压力传感器将信号通过控制器传递给平衡车内部的动力模块,从而使动力模块控制平衡车前行、后退、转弯;第五步,平衡车进入自控制模式后,如在平衡车正常行驶过程中位于动力模块上方的壳体与路牙或异物即将发生接触,接触摩擦块首先与路牙接触并发生位移,此时撞击保护模块启动,缓冲元件将接触产生的撞击力吸收,接触传感器通过控制器控制动力模块停止运动,平衡车开始减速至停止,平衡车离开路牙后,接触摩擦块与路牙脱离接触,动力模块可以重新启动;第六步,平衡车在进入自控制模式后,如产生角度大于三十度的倾斜角度时,自动触发角度倾斜报警,由角度倾斜报警模块将信号传递至控制器,平衡车发出警报,且动力模块无法进行工作,平衡车倾斜角度小于三十度时,角度倾斜报警关闭,平衡车正常运转;第七步,用户使用完毕后长按开关键,使平衡车关机、电池停止供电,同时内部压力传感器与控制器断电,电量指示灯关闭。
6.优选的,撞击保护模块中,接触传感器安装在壳体上并与控制器连接,接触摩擦块与缓冲元件之间固定连接有缓冲块,触发撞击保护时,接触传感器感知到接触摩擦块的水
平位移,此时接触传感器将信号传递给控制器,控制器向动力模块发出停止信号,动力模块匀速降低转速至停止;触发撞击保护的条件为接触摩擦块水平位移并与接触传感器发生接触,动力模块开始减速时,减速距离为10
‑
20米。
7.优选的,电池数量为10节时,通过控制器将平衡车的电流大小调节为8
‑
9a,当电池数量分别为14节和20节时,通过控制器将平衡车的电流大小调节为10a。
8.优选的,自控制模式中,控制器内预先设置有定量,压力传感器收集用户通过踏板对压力传感器的踩踏力度信号,并传递至控制器中处理,最终将信号反馈至动力模块中执行,用户双脚向前发力并大于定量,此时平衡车向前直线运动,用户双脚向后发力并大于定量,此时平衡车向后直线运动;压力传感器感应到用户双脚发力力度大小不同时,在保持原有的行驶方向不变的前提下,左脚踩踏力度较大时,平衡车左转,右脚踩踏力度较大时,平衡车右转。
9.优选的,角度倾斜报警模块发出角度倾斜报警后3
‑
5秒内不取消,则平衡车内的动力模块无法进行工作。
10.优选的,电量指示灯具有绿灯状态、红灯报警状态、黄灯报警状态和黄灯闪烁状态,电量指示灯与平衡车内的电池连接,当平衡车电池电量在安全范围内时,电量指示灯是绿灯状态,否则为红灯报警或黄灯报警状态;平衡车电池进行充电时,电量指示灯是黄灯闪烁状态。
11.优选的,平衡车电池的额定电压为36v,当电压为35.5
‑
36v,电量指示灯进入绿灯状态,当电压为35
‑
35.5v,电量指示灯进入黄灯报警状态,否则进入红灯报警状态,电压为36
‑
35.5v时是电量安全范围。
12.优选的,平衡车内设置有电机温度保护模块,电机温度保护模块与控制器连接,当平衡车内的电机温度保护触发后,动力模块降低动力输出直至平衡车停止运动,平衡车平缓停下并使用户离开平衡车,同时动力模块锁死,此时平衡车无法使用,待动力模块温度恢复正常状态时,动力模块解锁,此时平衡车可以正常使用;平衡车启动电机温度保护的同时将角度倾斜报警屏蔽;电机温度保护触发条件为动力模块温度大于70摄氏度,动力模块正常温度为40摄氏度以下。
13.优选的,平衡车内设置有防堵转报警模块和报警指示灯,防堵转报警模块与控制器连接,报警指示灯和电池连接,当防堵转报警触发10秒钟后,报警指示灯闪烁并使动力模块停止运转;防堵转报警触发条件为平衡车的动力模块运转且无法驱动平衡车正常移动。
14.与现有技术相比,本发明的有益效果是:通过设置撞击保护模块,使平衡车在行驶过程中与路牙发生撞击接触后,能够缓冲撞击产生的撞击力,同时能够及时将平衡车停止,在减少了对平衡车的持续性伤害的同时,也保护了用户的个人安全,提高了平衡车的安全性,同时通过设置角度倾斜报警,使平衡车无法在倾斜角度大于三十度时长时间运转,保护了用户的个人安全,进一步提高了平衡车的安全性。
附图说明
15.图1为本发明结构示意图;图2为本发明电机温度保护模块的系统流程图;图3为本发明的右视结构示意图;
图4为图3中a
‑
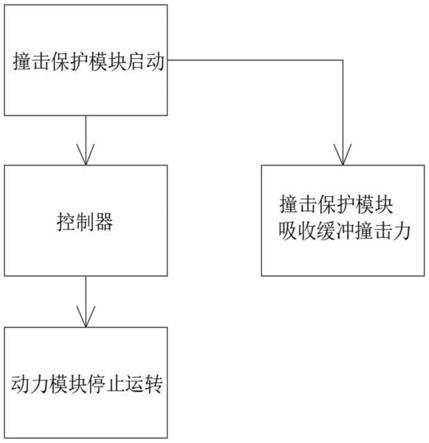
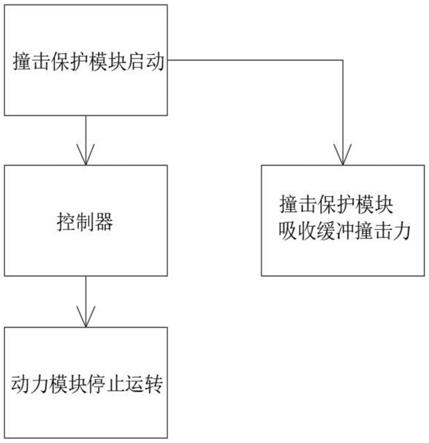
a方向的结构剖视图;图5为本发明撞击保护模块的系统流程图。
16.图中:10、动力模块;11、踏板;13、壳体;15、缓冲块;16、接触传感器;18、缓冲元件;19、接触摩擦块。
具体实施方式
17.实施例1:请参阅图1
‑
4,本发明提供一种技术方案:一种人机互动转换控制方法,控制方法步骤为:第一步,用户短按开关键,使平衡车开启、电池开始供电,同时内部压力传感器与控制器通电启动,电量指示灯亮绿灯;第二步,再次长按开关键,进入平衡车平衡调试状态,首先报警器进行声音警示,平衡车此时进入平衡调试状态,在整个调试过程中侧灯条灯光闪烁多次,控制器内预设有灯光闪烁次数,闪烁完毕后,整机平衡调试状态完成;第三步,当用户站立在平衡车的踏板11上方,用户双脚对分别设置在踏板11下方的压力传感器产生压力,而后平衡车自动开启慢速直线行驶的安全模式;安全模式结束后,平衡车进入可与用户进行互动的自控制模式,根据用户双脚通过踏板11对压力传感器产生的不同压力,压力传感器将信号通过控制器传递给平衡车内部的动力模块10,从而使动力模块10控制平衡车前行、后退、转弯;第五步,平衡车进入自控制模式后,如在平衡车正常行驶过程中位于动力模块10上方的壳体13与路牙或异物即将发生接触,接触摩擦块19首先与路牙接触并发生位移,此时撞击保护模块启动,缓冲元件18将接触产生的撞击力吸收,接触传感器16通过控制器控制动力模块10停止运动,平衡车开始减速至停止,平衡车离开路牙后,接触摩擦块19与路牙脱离接触,动力模块10可以重新启动;第六步,平衡车在进入自控制模式后,如产生角度大于三十度的倾斜角度时,自动触发角度倾斜报警,由角度倾斜报警模块将信号传递至控制器,平衡车发出警报,且动力模块10无法进行工作,平衡车倾斜角度小于三十度时,角度倾斜报警关闭,平衡车正常运转;第七步,用户使用完毕后长按开关键,使平衡车关机、电池停止供电,同时内部压力传感器与控制器断电,电量指示灯关闭。
18.在一个实施例中,撞击保护模块中,接触传感器16安装在壳体13上并与控制器连接,接触摩擦块19与缓冲元件18之间固定连接有缓冲块15,触发撞击保护时,接触传感器16感知到接触摩擦块19的水平位移,此时接触传感器16将信号传递给控制器,控制器向动力模块10发出停止信号,动力模块10匀速降低转速至停止;触发撞击保护的条件为接触摩擦块19水平位移并与接触传感器16发生接触,动力模块10开始减速时,减速距离为10
‑
20米。
19.在一个实施例中,电池数量为10节时,通过控制器将平衡车的电流大小调节为8
‑
9a,当电池数量分别为14节和20节时,通过控制器将平衡车的电流大小调节为10a。
20.在一个实施例中,自控制模式中,控制器内预先设置有定量,压力传感器收集用户通过踏板11对压力传感器的踩踏力度信号,并传递至控制器中处理,最终将信号反馈至动力模块10中执行,用户双脚向前发力并大于定量,此时平衡车向前直线运动,用户双脚向后发力并大于定量,此时平衡车向后直线运动;压力传感器感应到用户双脚发力力度大小不同时,在保持原有的行驶方向不变的前提下,左脚踩踏力度较大时,平衡车左转,右脚踩踏力度较大时,平衡车右转。
21.在一个实施例中,角度倾斜报警模块发出角度倾斜报警后3
‑
5秒内不取消,则平衡
车内的动力模块10无法进行工作。
22.在一个实施例中,电量指示灯具有绿灯状态、红灯报警状态、黄灯报警状态和黄灯闪烁状态,电量指示灯与平衡车内的电池连接,当平衡车电池电量在安全范围内时,电量指示灯是绿灯状态,否则为红灯报警或黄灯报警状态;平衡车电池进行充电时,电量指示灯是黄灯闪烁状态。
23.在一个实施例中,平衡车电池的额定电压为36v,当电压为35.5
‑
36v,电量指示灯进入绿灯状态,当电压为35
‑
35.5v,电量指示灯进入黄灯报警状态,否则进入红灯报警状态,电压为36
‑
35.5v时是电量安全范围。
24.在一个实施例中,平衡车内设置有电机温度保护模块,电机温度保护模块与控制器连接,当平衡车内的电机温度保护触发后,动力模块10降低动力输出直至平衡车停止运动,平衡车平缓停下并使用户离开平衡车,同时动力模块10锁死,此时平衡车无法使用,待动力模块10温度恢复正常状态时,动力模块10解锁,此时平衡车可以正常使用;平衡车启动电机温度保护的同时将角度倾斜报警屏蔽;电机温度保护触发条件为动力模块10温度大于70摄氏度,动力模块10正常温度为40摄氏度以下。
25.在一个实施例中,平衡车内设置有防堵转报警模块和报警指示灯,防堵转报警模块与控制器连接,报警指示灯和电池连接,当防堵转报警触发10秒钟后,报警指示灯闪烁并使动力模块10停止运转;防堵转报警触发条件为平衡车的动力模块10运转且无法驱动平衡车正常移动。
26.用户在使用时,双脚踩踏在平衡车表面,对平衡车进行正常使用,此时压力传感器作用,使用者的脚部前侧同时发力向前,则平衡车向前运动,后脚同时发力向后则平衡车向后运动,双脚发力力度不同时,左脚力度大于右脚力度则平衡车向左转,右脚力度大于左脚力度则平衡车向右侧转。
27.用户在使用时,角度倾斜报警模块时刻检测平衡车的倾斜角度,当平衡车倾斜角度大于30度时触发角度倾斜报警,报警3
‑
5秒不取消则平衡车动力模块10将动力输出缓慢降低至停止输出,若平衡角度未大于30度时,角度指示灯亮绿灯。
28.用户在使用时,平衡车在正常行驶过程中位于动力模块10上方的壳体13与路牙或异物即将发生接触时,由于接触摩擦块19位于壳体13之外,此时接触摩擦块19首先与路牙接触并向靠近壳体13的一侧发生位移,此时接触摩擦块19与接触传感器16接触,并启动撞击保护模块,接触摩擦块19在位移时通过缓冲块15将撞击力传递给缓冲元件18,使缓冲元件18将接触产生的撞击力吸收,同时接触传感器16通过控制器控制动力模块10停止运动,平衡车开始减速10
‑
20米后停止,当平衡车离开路牙后,在缓冲元件18的弹力作用下通过缓冲块15使接触摩擦块19向远离壳体13的一侧移动,此时接触摩擦块19与接触传感器16脱离接触,撞击保护模块关闭,此时,动力模块10可以重新启动。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。