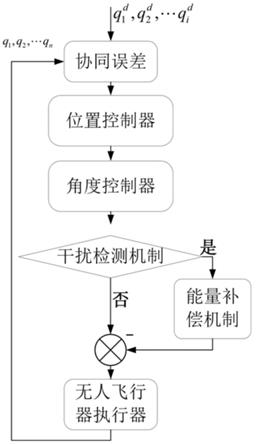
1.本发明涉及缆索检测技术领域,特别是一种缆索检测机器人的二自由度运动控制方法。
背景技术:
2.由于现在工业建筑设计对美观性、实用性和经济性的需求,缆索的使用越来越广泛,例如斜拉桥、悬索桥和缆车等均需要使用缆索来实现整体结构的稳定。缆索在使用过程中,承载很大的力,在使用过程中受到各种外界力的影响,且斜拉桥、悬索桥和缆车等对安全性能的要求十分严格,一旦发生断裂将产生十分严重的后果,甚至危及到人的生命,所以对缆索的质量验收、维护以及故障检测显得尤为重要。
3.斜拉桥被也称斜张桥或斜拉吊桥,主要是一种用缆索将主梁拉在桥塔上的受力体系桥梁,是近几十年来的新兴桥型,具有优良的经济性能及抗震性能。
4.缆索是斜拉桥的关键传力构件,其设计寿命一般为25
‑
30年,然而已有多座斜拉桥因缆索的锈蚀损坏进行提前换索。例如,美国p
‑
k桥是一座现代斜拉桥,原估计桥梁可用寿命为25年,实际却只用了5年就全部进行换索;中国济南黄河公路大桥使用13年、广州市海印大桥仅使用6.5年就全部换索。根据国内已换索桥梁统计,斜拉桥缆索的实际寿命平均不足15年,其中广东淇澳大桥的缆索仅从2001
‑
2007使用了6年就进行了更换,远远达不到设计寿命。为保障大型基础设施结构的运营安全和人们的生命财产安全,对缆索的检测非常重要。
5.目前斜拉桥缆索检测以外观检测和索力测定为主,并且主要以人工检测法为主要测量方法。使用卷扬机拖动吊篮小车搭载人工及检测传感器进行测量,该方法危险性高并且测量过程中重达百公斤的人工和检测设备会对缆索造成损伤。
6.随着斜拉桥的跨度越来越大,缆索受风振、雨振的影也响越来越大,由于螺旋线缆索及压痕凹坑缆索能有效的抑制缆索风雨激振现象,现已被新建桥梁普遍采用,同时也会带来一系列新的问题,由于螺旋线缆索表面有直径6-10mm的圆形凸起,且凸起的螺旋线与缆索pe保护层材料相同,承受不住较大外力,故卷扬机拖动吊篮小车和现研究的轮式检测机器人方案无法在保护缆索表面螺旋线的情况下对其进行有效检测,故在螺旋上升状态下对缆索进行检测具有重要意义。
技术实现要素:
7.本发明要解决的技术问题是针对上述现有技术的不足,而提供一种缆索检测机器人的二自由度运动控制方法,该缆索检测机器人的二自由度运动控制方法能针对不同直径缆索、索体直径均匀变化的同一缆索进行有效检测,检测范围覆盖光滑长直缆索和螺旋线缆索类型,也即能以沿着缆索轴向方向不变的姿态或螺旋上升姿态对缆索进行检测。
8.为解决上述技术问题,本发明采用的技术方案是:
9.一种缆索检测机器人的二自由度运动控制方法,包括如下步骤。
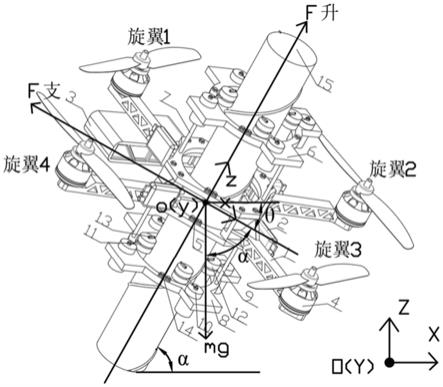
10.步骤1、建立坐标系:缆索检测机器人为四旋翼检测机器人,具有四个旋翼;坐标系包括地球坐标系e(x,y,z)和检测机器人坐标系e(x,y,z);其中,地球坐标系e(x,y,z)的原点o为地心,x轴为过地心的水平方向,y轴为过地心且垂直于x轴的水平方向,z轴为过地心的竖直方向;检测机器人坐标系e(x,y,z)中的原点o为缆索检测机器人的对称中心,z轴为过原点o且与缆索轴向相平行的轴,x
‑
y平面平行于四个旋翼所在平面。
11.步骤2、建立转速模型:在检测机器人坐标系中,对每个旋翼电机均建立一个转速模型,转速模型为旋翼电机转速与输入电流之间的函数方程,具体表达式为:
[0012][0013][0014]
式中,t
m
为电机响应时间常数;为当前t时刻时的旋翼电机转速;σ(t)为当前t时刻时的输入电流大小;为稳态转速;σ
c
为稳态转速时的输入电流值;c
r
为与σ
c
的比值;为偏移系数,反映电流零输入条件下电机的偏移转速。
[0015]
步骤3、求解转速:将四个旋翼所对应的电机输入电流分别代入公式(1)中,从而得到四个旋翼的转速,分别为和
[0016]
步骤4、建立控制效率模型:在检测机器人坐标系中,根据步骤2建立的转速模型,对缆索检测机器人建立控制效率模型;控制效率模型包括升力模型、以及x、y和z轴上的力矩模型,具体表示为:
[0017][0018]
式中,f为旋翼升力;c
t
、c
m
表征了电机转速和各轴上力矩的关系,在具体实验环境下测得;t
x
、t
y
和t
z
分别为缆索检测机器人在x、y和z轴上的旋转力矩;d为旋翼电机与缆索中心轴间的距离。
[0019]
步骤5、建立姿态模型:在检测机器人坐标系中,根据欧拉方程,对缆索检测机器人建立力矩与角速度的姿态模型为:
[0020][0021]
式(3)中,j
xx
、j
yy
和j
zz
分别为缆索检测机器人在x、y和z轴上的转动惯量;ω
x
、ω
y
和ω
z
分别为缆索检测机器人分别在x、y和z轴上的姿态角速度;为ω
x
的一阶导数;为ω
y
的一阶导数;为ω
z
的一阶导数。
[0022]
步骤6、求解姿态角速度:将步骤3求解的四个旋翼的转速,代入公式(2)中,求解得
到t
x
、t
y
和t
z
,再将得到的t
x
、t
y
和t
z
代入公式(3)中,进行求解,从而得到ω
x
、ω
y
和ω
z
。
[0023]
步骤7、坐标转换:将步骤4求解得到的ω
x
、ω
y
和ω
z
,分别转换至地球坐标系,得到地球坐标系下对应的姿态角速度ω
x
′
、ω
y
′
和ω
z
′
。
[0024]
步骤8、二自由度控制:通过控制四个旋翼电机的转速,实现缆索检测机器人在地球坐标系下姿态角速度ω
x
′
、ω
y
′
和ω
z
′
的调整,进而实现缆索检测机器人在缆索轴向和周向上二自由度的控制。
[0025]
缆索为光滑缆索或螺旋线缆索。
[0026]
步骤7中,坐标转换公式为:
[0027][0028]
式中,θ为检测机器人坐标系下缆索检测机器人的俯仰角;φ为检测机器人坐标系下缆索检测机器人的横滚角。
[0029]
θ和φ的计算公式分别为:θ=90
°‑
α;φ=90
°
,α为缆索倾斜角度。
[0030]
步骤8中,在二自由度控制时,针对不同倾斜角度α的缆索,只需通过控制四个旋翼电机的转速,即能使缆索检测机器人以相同的z轴旋转角速度ω
z
′
绕缆索稳速上升。
[0031]
步骤8中,在二自由度控制时,针对均匀变直径的缆索,通过在缆索检测机器人的柔性轮上设置压力传感器,通过调整柔性轮与缆索之间的压力值,使得柔性轮与缆索之间的压力保持在设置压力范围内,从而实现缆索检测机器人的稳定爬升。
[0032]
柔性轮的数量和位置需根据缆索螺旋线的螺距和缆索直径进行设置。
[0033]
c
t
=1.201
×
10
‑5n/(rad/s)2,c
m
=1.574
×
10
‑7n
·
m/(rad/s)2。
[0034]
步骤8中,在二自由度控制时,当旋翼旋转时,空气会给旋翼施加阻力,所述阻力形成施加在缆索检测机器人上的反扭力矩;当四个旋翼转速相等,且1、3号旋翼逆时针转,2、4号旋翼顺时针转时,作用在旋翼上的反扭力矩将相互抵消,缆索检测机器人达到一个平衡状态;然后,通过改变各旋翼的转速,实现对缆索检测机器人运动状态的控制。
[0035]
当总升力大于或小于缆索检测机器人在z轴上的重量分力时,缆索检测机器人将沿缆索上升或下降;保持1、3号旋翼转速相同,2、4号旋翼转速相同,1、3号旋翼转速大于或小于2、4号旋翼转速时,缆检测机器人将顺时针或逆时针旋转,缆索检测机器人呈螺旋上升的运动状态;当总升力等于缆索检测机器人在z轴上的重量分力时,缆索检测机器人将在空中悬停。
[0036]
本发明具有如下有益效果:本发明机器人通过控制四个旋翼的电机转速即可实现在缆索的轴向和周向的二自由度的任意控制,以可控的螺旋上升运动姿态对不同倾角、直径的螺旋线缆索进行检测。
附图说明
[0037]
图1为检测机器人应用于光滑长直缆索的检测示意图。
[0038]
图2为检测机器人应用于螺旋线缆索的检测示意图。
[0039]
图3为检测机器人应用于光滑长直缆索的俯视图。
[0040]
图4为检测机器人的四旋翼爬升机构示意图。
[0041]
图5为检测机器人的悬架机构示意图。
[0042]
图6为本发明中建立的坐标系示意图。
[0043]
图7为地球坐标系下姿态角速度ω
x
′
、ω
y
′
和ω
z
′
随时间的变化规律。
[0044]
图8为在地球坐标系中,俯仰角θ
′
、横滚角φ
′
、偏航角ψ
′
随时间的变化规律。
[0045]
图9为机器人上升合力与缆索倾斜角度的关系图。
[0046]
其中有:
[0047]1‑
爬升机构。
[0048]
11
‑
电池。
[0049]2‑
悬架机构。
[0050]
21
‑
机臂安装板;22
‑
固定板;23
‑
连杆。
[0051]3‑
数据盒。
[0052]4‑
缆索导向夹紧组件。
[0053]
41
‑
转向结构;42
‑
柔性轮;43
‑
压力传感器。
[0054]5‑
联接件。
[0055]7‑
光滑长直缆索。
[0056]8‑
螺旋线缆索。
具体实施方式
[0057]
下面结合附图和具体较佳实施方式对本发明作进一步详细的说明。
[0058]
本发明的描述中,需要理解的是,术语“左侧”、“右侧”、“上部”、“下部”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,“第一”、“第二”等并不表示零部件的重要程度,因此不能理解为对本发明的限制。本实施例中采用的具体尺寸只是为了举例说明技术方案,并不限制本发明的保护范围。
[0059]
如图1所示,一种用于缆索检测的机器人,包括爬升机构1、悬架机构2和缆索导向夹紧组件4。
[0060]
爬升机构1优为四旋翼爬升机构,爬升机构1包括四个旋翼、四个旋翼电机、四个机臂11和两个机臂安装板12。
[0061]
每个机臂11的一端用于安装旋翼,机臂11的另一端安装于两个机臂安装板12之间,并将两个机臂安装板12连接形成一个整体。
[0062]
旋翼通过对应的旋翼电机驱动旋转,旋翼电机能实现检测机器人的姿态调整,使得爬升机构1的主体中心轴以与缆索中心轴相平行的姿态来飞行,以提供最大的上升动力。
[0063]
悬架机构2数量为两组,分别为上悬架和下悬架,对称连接于爬升机构1上下两侧,每组悬架机构2包括固定板21以及连杆22,固定板21通过连杆22固定于机臂安装板12上。
[0064]
进一步,每个机臂安装板为可拆卸的拼装结构,均优选包括对称分布于缆索两侧的左半弧形安装板和右半弧形安装板,左半弧形安装板和右半弧形安装板之间通过联接件固定连接。
[0065]
每个固定板21均优选包括对称分布于缆索两侧的右半固定板和左半固定板;右半固定板和左半固定板之间通过联接件固定连接。
[0066]
机臂安装板和固定板的可拆卸结构设置,使得拆卸与安装方便,模块式设计。固定板21和机臂安装板12之间留有足够的空间用于走线以及加装其它缆索检测设备和修护设备。
[0067]
固定板21上部沿周向安装有若干组缆索导向夹紧组件4;每组缆索导向夹紧组件4均包括转向结构41、柔性轮42和压力传感器43,柔性轮42通过转向机构41连接驱动电机,且柔性轮42滚动设于缆索外侧,柔性轮42上设有压力传感器43。优选的,转向机构采用360
°
转向机构,柔性轮42上设有压力传感器43,用以测量柔性轮12和缆索表面间的压力,再反馈给驱动电机来调节柔性轮42和缆索间的压力,驱动电机、柔性轮和压力传感器共同作用将悬架装置压紧在缆索表面。
[0068]
爬升机构1下部安装有数据盒3,爬升机构1上设置有电池13用于供电。数据盒3用于存储采集的数据和接收工作指令。
[0069]
实施时,本发明得益于模块化结构,针对不同直径、类型的缆索,选取适当的爬升机构和悬架机构,并根据缆索螺旋线的螺距和缆索直径来安排柔性轮的数量和位置,采用四旋翼爬升机构的主体中心轴与索体中心轴相水平甚至重合的姿态来飞行,以提供最大的爬升动力,极大的提高了检测效率,爬升机构可以沿着缆索轴向方向不变的姿态和螺旋上升姿态对缆索进行检测,通过360
°
转向机构连接的柔性轮,柔性轮可在缆索表面实现360
°
旋转。
[0070]
实施例一:在对光滑长直缆索7检测时,当所检测光滑长直缆索的直径随着长度均匀变化时,柔性轮上压力传感器测量柔性轮和缆索表面间的压力,反馈给驱动电机来调节柔性轮和缆索间的压力,共同作用将悬架装置压紧在缆索表面。
[0071]
实施例二:在对螺旋线缆索8检测时,柔性轮将会在螺旋线与线间的缆索面上做螺旋上升运动,避免了柔性轮做跨线运动,相较于其它轮式和磁吸附机器人需要不间断的在螺旋线缆索上做针对螺旋线的越障运动,大大增加了检测机器人的整体稳定性。
[0072]
一种缆索检测机器人的二自由度运动控制方法,包括如下步骤。
[0073]
步骤1、建立坐标系:缆索检测机器人为四旋翼检测机器人,具有四个旋翼;坐标系包括地球坐标系e(x,y,z)和检测机器人坐标系e(x,y,z),建立后的坐标系,如图1所示。
[0074]
上升地球坐标系e(x,y,z)的原点o为地心,x轴为过地心的水平方向,y轴为过地心且垂直于x轴的水平方向,z轴为过地心的竖直方向;检测机器人坐标系e(x,y,z)中的原点o为缆索检测机器人的对称中心,z轴为过原点o且与缆索轴向相平行的轴,x
‑
y平面平行于四个旋翼所在平面。
[0075]
步骤2、建立转速模型。
[0076]
电机输入一个电流后,不能立即到达稳定的转速,是一个逐渐上升的过程,通过机理分析,电机可近似看作一阶系统。假设电池电量不变,在检测机器人坐标系中,对每个旋翼电机均建立一个转速模型,转速模型为旋翼电机转速与输入电流之间的函数方程,具体表达式为:
[0077]
[0078][0079]
式中,t
m
为电机响应时间常数,一般为几十到几百毫秒,越小说明电机能够越快达到稳定转速;为当前t时刻时的旋翼电机转速;σ(t)为当前t时刻时的输入电流大小,可作为阶跃信号,在仿真建模时,将其简化为一输入阶跃信号,故而取值介于[0,1]之间;为稳态转速;σ
c
为稳态转速时的输入电流值;c
r
为与σ
c
的比值;为偏移系数,反映电流零输入条件下电机的偏移转速。
[0080]
步骤3、求解转速:将四个旋翼所对应的电机输入电流分别代入公式(1)中,从而得到四个旋翼的转速,分别为和
[0081]
步骤4、建立控制效率模型:在检测机器人坐标系中,根据步骤2建立的转速模型,对缆索检测机器人建立控制效率模型;控制效率模型包括升力模型、以及x、y和z轴上的力矩模型,具体表示为:
[0082][0083]
式中,f为旋翼升力;c
t
、c
m
表征了电机转速和各轴上力矩的关系,在具体实验环境下测得,优选取值为c
t
=1.201
×
10
‑5n/(rad/s)2;选取值为c
m
=1.574
×
10
‑7n
·
m/(rad/s)2。
[0084]
t
x
、t
y
和t
z
分别为缆索检测机器人在x、y和z轴上的旋转力矩;d为旋翼电机与缆索中心轴间的距离,优选取值为d=0.225m。
[0085]
步骤5、建立姿态模型:在检测机器人坐标系中,根据欧拉方程,对缆索检测机器人建立力矩与角速度的姿态模型为:
[0086][0087]
式(3)中,j
xx
、j
yy
和j
zz
分别为缆索检测机器人在x、y和z轴上的转动惯量;ω
x
、ω
y
和ω
z
分别为缆索检测机器人分别在x、y和z轴上的姿态角速度;为ω
x
的一阶导数;为ω
y
的一阶导数;为ω
z
的一阶导数。
[0088]
步骤6、求解姿态角速度:将步骤3求解的四个旋翼的转速,代入公式(2)中,求解得到t
x
、t
y
和t
z
,再将得到的t
x
、t
y
和t
z
代入公式(3)中,进行求解,从而得到ω
x
、ω
y
和ω
z
。
[0089]
步骤7、坐标转换:将步骤4求解得到的ω
x
、ω
y
和ω
z
,分别转换至地球坐标系,得到地球坐标系下对应的姿态角速度ω
x
′
、ω
y
′
和ω
z
′
。
[0090]
上升坐标转换公式优选为:
[0091][0092]
式中,θ为检测机器人坐标系下缆索检测机器人的俯仰角,也即为检测机器人坐标系下x方向与水平面间的夹角;φ为检测机器人坐标系下缆索检测机器人的横滚角,也即机体y轴绕x轴旋转的角度;α为缆索倾斜角度。
[0093]
另外,检测机器人坐标系下的俯仰角θ、横滚角φ和偏航角ψ转换至地球坐标系下后分别为俯仰角θ
′
、横滚角φ
′
和偏航角ψ
′
。
[0094]
步骤8、二自由度控制:通过控制四个旋翼电机的转速,实现缆索检测机器人在地球坐标系下姿态角速度ω
x
′
、ω
y
′
和ω
z
′
的调整,进而实现缆索检测机器人在缆索轴向和周向上二自由度的控制。
[0095]
在二自由度控制时,针对不同倾斜角度α的缆索,只需通过控制四个旋翼电机的转速,即能使缆索检测机器人以相同的z轴旋转角速度ω
z
′
绕缆索稳速上升。
[0096]
在二自由度控制时,针对均匀变直径的缆索,通过在缆索检测机器人的柔性轮上设置压力传感器,通过调整柔性轮与缆索之间的压力值,使得柔性轮与缆索之间的压力保持在设置压力范围内,从而实现缆索检测机器人的稳定爬升。
[0097]
在二自由度控制时,当旋翼旋转时,空气会给旋翼施加阻力,所述阻力形成施加在缆索检测机器人上的反扭力矩;当四个旋翼转速相等,且1、3号旋翼逆时针转,2、4号旋翼顺时针转时,作用在旋翼上的反扭力矩将相互抵消,缆索检测机器人达到一个平衡状态;然后,通过改变各旋翼的转速,实现对缆索检测机器人运动状态的控制。
[0098]
当总升力(也即上升合力f=f
‑
mgsinα)大于或小于缆索检测机器人在z轴上的重量分力时,缆索检测机器人将沿缆索上升或下降;保持1、3号旋翼转速相同,2、4号旋翼转速相同,1、3号旋翼转速大于或小于2、4号旋翼转速时,缆检测机器人将顺时针或逆时针旋转,缆索检测机器人呈螺旋上升的运动状态;当总升力等于缆索检测机器人在z轴上的重量分力时,缆索检测机器人将在空中悬停。
[0099]
螺旋爬升仿真实验分析
[0100]
在matlab仿真环境下搭建了机器人动力学仿真模型,机器人能在α=30
°
~90
°
的缆索倾斜角度内,最终以ω
z
′
=0.72rad/s的旋转角速度稳定上升。仿真过程中,电机常数t
m
=17.3
×
10
‑3,电机转速变化比c
r
=706.1,机器人质量m=1.4kg,重力加速度g=9.8n/kg,x轴、y轴、z轴上的转动惯量分别为j
xx
=1.563
×
10
‑2kg
·
m2、j
yy
=1.563
×
10
‑2kg
·
m2、j
zz
=2.636
×
10
‑2kg
·
m2,仿真时间为30s,忽略了空气阻力等因素。仿真过程中,机器人初始输入电流为[0.53;0.51;0.53;0.51],机器人启动后,升力逐渐增加,最终克服重力向上爬升。在爬升过程中,机器人在z轴上的姿态变化率逐渐上升,最终以ω
z
′
=0.72rad/s的速度绕缆索进行旋转。
[0101]
图7和图8反映了在机器人初始输入电流为[0.53;0.51;0.53;0.51]的情况下,其
姿态角速度和姿态角的变化规律。姿态角速度主要由四个螺旋桨的转矩提供,其达到稳定旋转速度的时间与电机常数有关,机器人姿态角速度与电机的最终旋转速度有关。图9为机器人上升合力与缆索倾斜角度的关系图。总升力由四个螺旋桨的升力提供,在相同初始油门下,随着缆索倾斜角度的逐渐上升,机器人上升力逐渐减小,但随着缆索倾斜角度的逐渐上升,其对机器人上升速度的影响越来越小。综合图7、图8和图9,可通过对电机转速的控制来实现机器人的稳定螺旋上升。
[0102]
根据受力分析可知,缆索的支撑力与mgcosα平衡,当总升力大于mgsinα时,检测机器人沿着缆索缓慢上升,保持1、3号旋翼转速相同,2、4号旋翼转速相同,1、3号旋翼转速大于(小于)2、4号旋翼转速时,检测机器人顺(逆)时针旋转,检测机器人呈螺旋上升的运动状态。我们发现,在4个旋翼由各自固定转速启动时,倾斜角度只会影响无人机沿爬杆上升的速度,并不会影响无人机的螺旋自转速度。
[0103]
综上,本发明机器人通过控制四个旋翼的电机转速即可实现在缆索的轴向和周向的二自由度的任意控制,以可控的螺旋上升运动姿态对不同倾角、直径的螺旋线缆索进行检测。
[0104]
以上详细描述了本发明的优选实施方式,但是,本发明并不限于上述实施方式中的具体细节,在本发明的技术构思范围内,可以对本发明的技术方案进行多种等同变换,这些等同变换均属于本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。