1.本发明涉及自动建筑施工技术领域,特别是涉及一种全覆盖路径规划方法及导航系统。
背景技术:
2.随着建筑业的智能化升级,为实现室外施工的建筑机器人的自动行走和施工,关键技术在于行走路径的规划和导航。室外施工的智能建筑机器人通常需要采用基于gnss的组合导航系统和全覆盖的路径规划方法。然而对于高精度的室外施工,基于gnss的组合导航系统的控制精度不能满足要求。
3.公开号为cn112894816a的中国发明专利申请于2021年6月4日公开了一种基于gnss和rfid的变电站巡检机器人导航定位方法,通过制作变电站巡检导航文件并根据巡检导航文件下达导航路径和方案;巡检机器人行走过程中,gnss移动站收发信号得到实时位置信息;巡检机器人行走时,路标匹配、rfid实时读写定位、实现gnss与rfid进行变电站巡检机器人的协同定位与导航,巡检机器人平台摄像单元实时获取巡检信息,通过gnss与rfid接收到的地理位置信息和摄像头采集的图像信息不断发送到远程监控平台。该方案虽然大大地提高了巡检机器人的定位精度,但其通过gnss与rfid技术在实现该方法的过程中,由于机器人的施工机构往往安装在设备的头部或尾部,缺乏对设备本体体积的考虑,无法真正做到全覆盖施工和无法满足施工过程中对无重复路径的要求。
技术实现要素:
4.本发明为了解决以上至少一种技术缺陷,提供一种全覆盖路径规划方法,解决了因机器人自身体积而无法全覆盖施工的问题。
5.本发明还提供一种全覆盖路径导航系统,提高机器人施工覆盖面积和全覆盖行走效率。
6.为解决上述技术问题,本发明的技术方案如下:
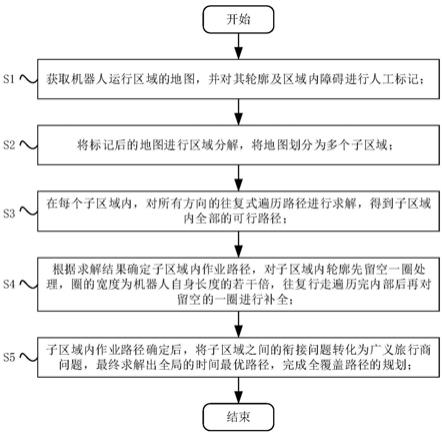
7.一种全覆盖路径规划方法,应用于机器人,包括以下步骤:
8.s1:获取机器人运行区域的地图,并对其轮廓及区域内障碍进行人工标记;
9.s2:将标记后的地图进行区域分解,将地图划分为多个子区域;
10.s3:在每个子区域内,对所有方向的往复式遍历路径进行求解,得到子区域内全部的可行路径;
11.s4:根据步骤s3的求解结果确定子区域内作业路径,对子区域内轮廓先留空一圈处理,圈的宽度为机器人自身长度的若干倍,往复行走遍历完内部后再对留空的一圈进行补全;
12.s5:子区域内作业路径确定后,将子区域之间的衔接问题转化为广义旅行商问题,最终求解出全局的时间最优路径,完成全覆盖路径的规划。
13.上述方案中,本方案提出了改进的全覆盖路径规划方法,在确定子区域内作业路
径时,充分考虑了机器人自身长度的影响,解决了因机器人自身体积而传统往复式路线无法全覆盖施工的问题;同时考虑全部子区域的可行路径,从而规划出全局最优路径,提高机器人施工覆盖面积和全覆盖行走的效率。
14.其中,在所述步骤s1中,所述地图为经过坐标变换处理的作业区域轮廓及区域内障碍的拓扑地图。
15.其中,在所述步骤s2中,采用牛耕分解法或梯形分解法对标记后的地图进行区域分解。
16.其中,在所述步骤s3中,对每个子区域都计算其所有可行的往复式遍历方向,并根据机器人预设的直线运行速度和转弯运行速度计算出每个方向覆盖完子区域所需的运行时间,获取运行时间满足要求的全部的可行路径。
17.其中,在所述步骤s5中,将同一个子区域内每种可行路径视为广义旅行商问题中无向图的一个结点,每个子区域内所有可行路径的集合视为点集;由欧拉最短路径求取不同点集的两个结点之间的最短路径,并以该最短路径的长度作为无向图的边,构造得到邻接矩阵,至此完成广义旅行商问题的构建;最后,使用蚁群算法求解广义旅行商问题求解出全局的时间最优路径。
18.本发明还提供一种全覆盖路径导航系统,包括机器人和基站,还包括组合定位模块、通信模块、计算处理模块和远程客户端;其中:
19.组合定位模块固定安装在机器人本体上,用于通过通信模块获取基站的坐标位置信息和姿态信息并传输给计算处理模块;
20.计算处理模块通过通信模块与远程客户端通信连接,用于接收远程客户端的机器人运行区域的地图、控制指令、预设参数及向远程客户端反馈信息;
21.计算处理模块固定安装在机器人本体上,用于执行一种全覆盖路径规划方法,实现机器人的全覆盖路径导航,具体为:
22.计算处理模块获取远程客户端传输的运行区域的地图,并根据远程客户端的控制指令对其轮廓及区域内障碍进行人工标记;将标记后的地图进行区域分解,将地图划分为多个子区域;根据远程客户端传输的预设参数和组合定位模块获取的基站坐标位置信息及姿态信息对每个子区域内所有方向的往复式遍历路径进行求解,得到子区域内全部的可行路径,确定子区域内作业路径;子区域内作业路径确定后,将子区域之间的衔接问题转化为广义旅行商问题,求解出全局的时间最优路径,完成全覆盖路径规划;最后根据全覆盖路径规划对机器人进行控制。
23.其中,所述计算处理模块采用单片机控制模块和工控机平台实现;其中:
24.单片机控制模块用于从组合定位模块获取的基站坐标位置信息及姿态信息,通过通信模块接收远程客户端的机器人运行区域的地图、控制指令、预设参数;将以上信息打包并传输给所述工控机平台,并根据工控机平台反馈对控制信号对机器人进行闭环控制;
25.所述工控机平台用于根据运行区域的地图,远程客户端的控制指令、预设参数,基站坐标位置信息及姿态信息进行全覆盖路径规划,并根据路径规划发送控制信号给单片机控制模块,实现全覆盖导航。
26.其中,在所述计算处理模块中,采用牛耕分解法或梯形分解法对标记后的地图进行区域分解。
27.其中,所述计算处理模块在确定子区域内作业路径过程中,对子区域内轮廓先留空一圈处理,圈的宽度为机器人自身长度的若干倍,往复行走遍历完内部后再对留空的一圈进行补全。
28.其中,在所述计算处理模块中,将同一个子区域内每种可行路径视为广义旅行商问题中无向图的一个结点,每个子区域内所有可行路径的集合视为点集;由欧拉最短路径求取不同点集的两个结点之间的最短路径,并以该最短路径的长度作为无向图的边,构造得到邻接矩阵,完成广义旅行商问题的构建,最后使用蚁群算法求解广义旅行商问题求解出全局的时间最优路径。
29.通过本方案提供的系统可实现机器人的全覆盖自动导航,在允许施工区域有重叠而机器人行走路径没有重叠的条件下,实现接近100%的施工覆盖面。
30.与现有技术相比,本发明技术方案的有益效果是:
31.本发明提出了一种全覆盖路径规划方法,提出了改进的全覆盖路径规划方法,在确定子区域内作业路径时,充分考虑了机器人自身长度的影响,解决了因机器人自身体积而传统往复式路线无法全覆盖施工的问题;同时考虑全部子区域的可行路径,从而规划出全局最优路径,对提高机器人施工覆盖面积和全覆盖行走的效率。本发明还提出一种全覆盖路径导航系统,可实现机器人的全覆盖自动导航,在允许施工区域有重叠而机器人行走路径没有重叠的条件下,提高机器人施工覆盖面积和全覆盖行走的效率。
附图说明
32.图1为本发明一实施例中所述的方法流程示意图;
33.图2为本发明一实施例中对原始地图进行人工标记的示意图;
34.图3为本发明一实施例中对某子区域内所有可行方向的枚举示意图;
35.图4为本发明一实施例中一种y方向单调的示例图;
36.图5为本发明一实施例中使用优化算法规划出全局最优路线的示意图;
37.图6为本发明一实施例中所述的系统连接示意图。
具体实施方式
38.附图仅用于示例性说明,不能理解为对本专利的限制;
39.为了更好说明本实施例,附图某些部件会有省略、放大或缩小,并不代表实际产品的尺寸;
40.对于本领域技术人员来说,附图中某些公知结构及其说明可能省略是可以理解的。
41.下面结合附图和实施例对本发明的技术方案做进一步的说明。
42.实施例1
43.如图1所示,一种全覆盖路径规划方法,应用于机器人,包括以下步骤:
44.s1:获取机器人运行区域的地图,并对其轮廓及区域内障碍进行人工标记;
45.s2:将标记后的地图进行区域分解,将地图划分为多个子区域;
46.s3:在每个子区域内,对所有方向的往复式遍历路径进行求解,得到子区域内全部的可行路径;
47.s4:根据步骤s3的求解结果确定子区域内作业路径,对子区域内轮廓先留空一圈处理,圈的宽度为机器人自身长度的若干倍,往复行走遍历完内部后再对留空的一圈进行补全;
48.s5:子区域内作业路径确定后,将子区域之间的衔接问题转化为广义旅行商问题,最终求解出全局的时间最优路径,完成全覆盖路径的规划。
49.在具体实施过程中,本方案提出了改进的全覆盖路径规划方法,在确定子区域内作业路径时,充分考虑了机器人自身长度的影响,解决了因机器人自身体积而传统往复式路线无法全覆盖施工的问题;同时考虑全部子区域的可行路径,从而规划出全局最优路径,提高机器人施工覆盖面积和全覆盖行走的效率。
50.更具体的,在所述步骤s1中,所述地图为经过坐标变换处理的作业区域轮廓及区域内障碍的拓扑地图,其中作业区域的轮廓使用多边形表示,区域内障碍以最小包围矩形表示,如图2所示。
51.在具体实施过程中,原始地图的获取可以通过无人机在空中拍摄作业区域,或导入cad二维平面图后对原始地图再进行人工标记。
52.更具体的,在所述步骤s2中,采用牛耕分解法或梯形分解法等单元分解法对标记后的地图进行区域分解。
53.更具体的,在所述步骤s3中,对每个子区域都计算其所有可行的往复式遍历方向,并根据机器人预设的直线运行速度和转弯运行速度计算出每个方向覆盖完子区域所需的运行时间,获取运行时间满足要求的全部的可行路径。
54.在具体实施过程中,如图3所示,对某一子区域内所有可行方向进行枚举,箭头为初始速度方向。在具体实施过程中,选择可行方向时可按y方向单调原则选取。y方向单调原则指:以多边形子区域的某条边的方向为y方向,其垂直方向为x方向;使用与y方向平行的扫描线扫描该区域,若所有扫描线与该区域轮廓的交点不多于两个,则称该方向为单调的,如图4为一种y方向单调的示例。
55.在具体实施过程中,子区域内进行路径规划时,根据用户设置的机器人直线运行速度和转弯运行速度等多种参数,对所有坑内的遍历作业方向进行计算,最终获取子区域内的全部可行路径。
56.更具体的,在所述步骤s5中,如图5所示,将同一个子区域内每种可行路径视为广义旅行商问题中无向图的一个结点,每个子区域内所有可行路径的集合视为点集;由欧拉最短路径求取不同点集的两个结点之间的最短路径,并以该最短路径的长度作为无向图的边,构造得到邻接矩阵,至此完成广义旅行商问题的构建;最后,使用蚁群算法求解广义旅行商问题求解出全局的时间最优路径。
57.在具体实施过程中,使用蚁群算法求解广义旅行商问题于求解普通旅行商问题的方法相同,只需要添加判断确保当前结点与下一结点不是同一点集的结点即可。
58.在具体实施过程中,本方案提出了改进的全覆盖路径规划方法,在确定子区域内作业路径时,充分考虑了机器人自身长度的影响,解决了因机器人自身体积而传统往复式路线无法全覆盖施工的问题;同时考虑全部子区域的可行路径,从而规划出全局最优路径,提高机器人施工覆盖面积和全覆盖行走的效率。
59.实施例2
60.更具体的,在实施例1的基础上,如图6所示,本发明还提供一种全覆盖路径导航系统,包括机器人和基站,还包括组合定位模块、通信模块、计算处理模块和远程客户端;其中:
61.组合定位模块固定安装在机器人本体上,用于通过通信模块获取基站的坐标位置信息和姿态信息并传输给计算处理模块;
62.计算处理模块通过通信模块与远程客户端通信连接,用于接收远程客户端的机器人运行区域的地图、控制指令、预设参数及向远程客户端反馈信息;
63.计算处理模块固定安装在机器人本体上,用于执行一种全覆盖路径规划方法,实现机器人的全覆盖路径导航,具体为:
64.计算处理模块获取远程客户端传输的运行区域的地图,并根据远程客户端的控制指令对其轮廓及区域内障碍进行人工标记;将标记后的地图进行区域分解,将地图划分为多个子区域;根据远程客户端传输的预设参数和组合定位模块获取的基站坐标位置信息及姿态信息对每个子区域内所有方向的往复式遍历路径进行求解,得到子区域内全部的可行路径,确定子区域内作业路径;子区域内作业路径确定后,将子区域之间的衔接问题转化为广义旅行商问题,求解出全局的时间最优路径,完成全覆盖路径规划;最后根据全覆盖路径规划对机器人进行控制。
65.在具体实施过程中,组合定位模块接收卫星信号并解算rtk数据,同时提供融合机器人自身轮速计、陀螺仪惯导和rtk数据后,可以输出精度不低于2.5cm的定位数据。
66.在具体实施过程中,通信模块可通过4g或者无线电与基站进行基于rtcm3协议的数据通信;通过4g或wifi与远程客户端进行通信;转发、转接基于串口/spi/can/iic总线上各传感器的消息;用户可在远程客户端上设置机器人行走速度、转弯速度、施工速度等参数,或对机器人进行遥控控制,通信模块把以上信息综合处理打包后发送至计算处理模块。
67.更具体的,单片机控制模块用于从组合定位模块获取的基站坐标位置信息及姿态信息,通过通信模块接收远程客户端的机器人运行区域的地图、控制指令、预设参数;将以上信息打包并传输给所述工控机平台,并根据工控机平台反馈对控制信号对机器人进行闭环控制;
68.所述工控机平台用于根据运行区域的地图,远程客户端的控制指令、预设参数,基站坐标位置信息及姿态信息进行全覆盖路径规划,并根据路径规划发送控制信号给单片机控制模块,实现全覆盖导航。
69.在具体实施过程中,计算处理模块由单片机控制模块和工控机平台两个主控构成,其中一级主控为stm32系列单片机构成的单片机控制模块,提供1khz以上的控制频率和实时收集、处理来自通信模块的信息;一级主控把路径规划的相关参数、机器人当前状态打包后通过串口发送至二级主控;二级主控为因特尔的nuc系列pc,运行主频高达3 ghz,用于全覆盖路径的优化计算,低频率的实时控制、机器人施工控制。
70.更具体的,在所述计算处理模块中,采用牛耕分解法或梯形分解法对标记后的地图进行区域分解。
71.更具体的,所述计算处理模块在确定子区域内作业路径过程中,对子区域内轮廓先留空一圈处理,圈的宽度为机器人自身长度的若干倍,往复行走遍历完内部后再对留空的一圈进行补全。
72.更具体的,在所述计算处理模块中,将同一个子区域内每种可行路径视为广义旅行商问题中无向图的一个结点,每个子区域内所有可行路径的集合视为点集;由欧拉最短路径求取不同点集的两个结点之间的最短路径,并以该最短路径的长度作为无向图的边,构造得到邻接矩阵,完成广义旅行商问题的构建,最后使用蚁群算法求解广义旅行商问题求解出全局的时间最优路径。
73.通过本方案提供的系统可实现机器人的全覆盖自动导航,在允许施工区域有重叠而机器人行走路径没有重叠的条件下,实现接近100%的施工覆盖面。
74.在具体实施过程中,本方案通过构建一种全覆盖路径导航系统,采用二级控制结构,实现一种全覆盖路径规划方法,有效提高机器人施工覆盖面积和全覆盖行走效率,且系统构成简单,适用性强。
75.显然,本发明的上述实施例仅仅是为清楚地说明本发明所作的举例,而并非是对本发明的实施方式的限定。对于所属领域的普通技术人员来说,在上述说明的基础上还可以做出其它不同形式的变化或变动。这里无需也无法对所有的实施方式予以穷举。凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明权利要求的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。