一种叉车堆高式agv多规格及超规格货物自动检测系统
技术领域
1.本实用新型涉及生产运输检测领域,具体涉及一种叉车堆高式agv多规格及超规格货物自动检测系统。
背景技术:
2.现有agv叉车的导引和控制方法的专利大多涉及二维的位置或航道控制,采用二维码或激光导航,可按设定路线到指定位置进行叉取或存放托盘料箱作业。目前的agv叉车的作业方式在叉取托盘或料箱时,仅以指定路线叉取标准物件,当存在多种尺寸或料箱时,agv叉车无法判断物件大小,不能根据物件规格规划行车路径、进行分类存放。
技术实现要素:
3.本实用新型内容的目的在于提供一种叉车堆高式agv多规格及超规格货物自动检测系统,以实现agv叉车对货物尺寸的自动识别、超规格预警,以及根据货物尺寸的路径规划。
4.为实现上述目的,本实用新型提供了一种技术方案:一种叉车堆高式agv多规格及超规格货物自动检测系统,包括叉车,叉车包括相连接的叉车主体和货叉;叉车主体内部设置有控制模块,控制模块连接有报警模块;叉车主体两侧对称设置有宽度感应装置与高度感应装置。
5.按上述方案,所述宽度感应装置包括第一悬臂和第二悬臂,第一悬臂和第二悬臂均与所述叉车主体连接固定,第一悬臂上依次横向设置有第一传感器、第二传感器和第三传感器;第二悬臂上依次横向设置有第四传感器、第五传感器和第六传感器,所述第一至第六传感器通过线缆与所述控制模块连接。
6.按上述方案,所述高度感应装置包括第七传感器和第八传感器,第七和第八传感器通过线缆与所述控制模块连接。
7.按上述方案,所述第一至第六传感器为光电传感器。
8.按上述方案,所述第七和第八传感器为光电传感器。
9.按上述方案,所述第一传感器与第四传感器之间横向距离为0.9~1m。
10.按上述方案,所述第二传感器与第五传感器之间横向距离为1.1~1.2m。
11.按上述方案,所述第三传感器与第六传感器之间横向距离大于1.2m。
12.本实用新型的有益效果是:通过设置高度感应装置和宽度感应装置实现了对叉取货物的宽度和高度尺寸的识别,通过设置的控制模块和报警模块实现了根据货物尺寸规划行车路径以及对超高超宽货物的报警提示功能。
附图说明
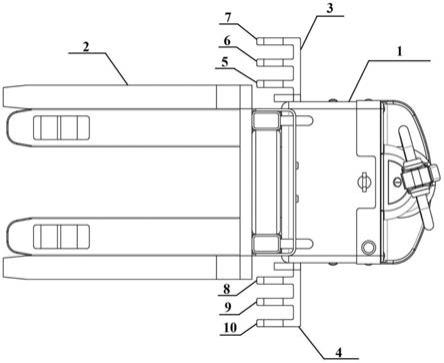
13.图1为本实用新型一实施例的结构俯视图;
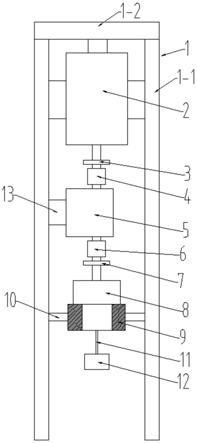
14.图2为本实用新型一实施例的结构正视图;
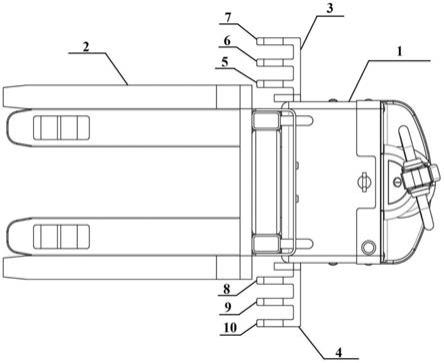
15.图3为本实用新型一实施例的结构右视图。
16.图中:1
‑
叉车主体,2
‑
货叉,3
‑
第一悬臂,4
‑
第二悬臂,5
‑
第一传感器,6
‑
第二传感器,7
‑
第三传感器,8
‑
第四传感器,9
‑
第五传感器,10
‑
第六传感器,11
‑
第七传感器,12
‑
第八传感器。
具体实施方式
17.为使本公开实施例的目的、技术方案和优点更加清楚,下面将结合本公开实施例的附图,对本公开实施例的技术方案进行清楚、完整地描述。显然,所描述的实施例是本公开的一部分实施例,而不是全部的实施例。基于所描述的本公开的实施例,本领域普通技术人员在无需创造性劳动的前提下所获得的所有其他实施例,都属于本实用新型公开保护的范围。
18.如图1、图2、图3所示,本实用新型实施例的一种叉车堆高式agv多规格及超规格货物自动检测系统:包括叉车,叉车包括相连接的叉车主体1和货叉2;叉车主体1内部设置有控制模块,控制模块连接有报警模块;叉车主体1两侧对称设置有宽度感应装置与高度感应装置。
19.进一步地,所述宽度感应装置包括第一悬臂3和第二悬臂4,第一悬臂3和第二悬臂4均与叉车主体1连接固定,第一悬臂3上依次横向设置有第一传感器5、第二传感器6和第三传感器7;第二悬臂4上依次横向设置有第四传感器8、第五传感器9和第六传感器10,所述第一至第六传感器通过线缆与所述控制模块连接。
20.进一步地,所述高度感应装置包括第七传感器7和第八传感器12,第七和第八传感器通过线缆与所述控制模块连接。
21.进一步地,所述第一至第六传感器为光电传感器。
22.进一步地,所述第七和第八传感器为光电传感器。
23.进一步地,所述第一传感器5与第四传感器8之间横向距离为1m。
24.进一步地,所述第二传感器6与第五传感器9之间横向距离为1.2m。
25.进一步地,所述第三传感器7与第六传感器10之间横向距离大于1.2m。
26.该系统的工作过程为:当货叉2叉取货物时,通过宽度感应装置和高度感应装置对货物进行尺寸识别;
27.当宽度感应装置的所有传感器皆无电信号时,控制模块判断该货物宽度小于1m;
28.当第一传感器5和第四传感器8产生电信号,而第二传感器6和第五传感器9无电信号时,控制模块判断该货物宽度大于1m且小于1.2m;
29.当第一传感器5、第二传感器6、第四传感器8、第五传感器9产生电信号而第三传感器7与第六传感器10无电信号时,控制模块判断该货物宽度大于1.2m且未超宽;
30.当宽度感应装置的所有传感器皆产生电信号时,控制系统判断该货物宽度超宽,并控制报警模块发出警报,使人工介入处理;
31.当第七传感器11和第八传感器12无电信号时,控制系统判断该货物未超高,反之判断该货物超高,控制报警模块发出警报,使人工介入处理;
32.控制系统通过对货物尺寸的判断规划行车路径和货物存放位置,避免货物与货架发生碰撞,同时通过报警系统避免了超规格货物摆上货架的风险,提高了无人化搬运的准
确性和安全性。
33.以上仅为本实用新型的实施例,并非因此限制本实用新型的专利范围,凡是利用本实用新型说明书及附图内容所作的等效结构或等效流程变换,或直接或间接运用在其它相关的技术领域,均同理包括在本实用新型的专利保护范围内。
技术特征:
1.一种叉车堆高式agv多规格及超规格货物自动检测系统,其特征在于:所述自动检测系统包括叉车,叉车包括相连接的叉车主体和货叉;叉车主体内部设置有控制模块,控制模块连接有报警模块;叉车主体两侧对称设置有宽度感应装置与高度感应装置。2.根据权利要求1所述的叉车堆高式agv多规格及超规格货物自动检测系统,其特征在于:所述宽度感应装置包括第一悬臂和第二悬臂,第一悬臂和第二悬臂均与所述叉车主体连接固定,第一悬臂上依次横向设置有第一传感器、第二传感器和第三传感器;第二悬臂上依次横向设置有第四传感器、第五传感器和第六传感器,所述第一至第六传感器通过线缆与所述控制模块连接。3.据权利要求1所述的叉车堆高式agv多规格及超规格货物自动检测系统,其特征在于:所述高度感应装置包括第七传感器和第八传感器,第七和第八传感器通过线缆与所述控制模块连接。4.根据权利要求2所述的叉车堆高式agv多规格及超规格货物自动检测系统,其特征在于:所述第一至第六传感器为光电传感器。5.根据权利要求3所述的叉车堆高式agv多规格及超规格货物自动检测系统,其特征在于:所述第七和第八传感器为光电传感器。6.根据权利要求2所述的叉车堆高式agv多规格及超规格货物自动检测系统,其特征在于:所述第一传感器与第四传感器之间横向距离为0.9~1m。7.根据权利要求2所述的叉车堆高式agv多规格及超规格货物自动检测系统,其特征在于:所述第二传感器与第五传感器之间横向距离为1.1~1.2m。8.根据权利要求2所述的叉车堆高式agv多规格及超规格货物自动检测系统,其特征在于:所述第三传感器与第六传感器之间横向距离大于1.2m。
技术总结
本实用新型公开了一种叉车堆高式AGV多规格及超规格货物自动检测系统,包括叉车,叉车包括相连接的叉车主体和货叉;叉车主体内部设置有控制模块,控制模块连接有报警模块;叉车主体两侧对称设置有宽度感应装置与高度感应装置。本发明通过宽度感应装置和高度感应装置实现了对货物规格的自动检测,通过控制模块和报警模块实现了根据货物尺寸的路径规划以及对超规格货物的报警,保证了无人化货物搬运的准确性与安全性。准确性与安全性。准确性与安全性。
技术研发人员:易平 蔡兵 安小宇 刘鑫 谭小波 罗洋 刘厚军
受保护的技术使用者:益模(重庆)智能制造研究院有限公司
技术研发日:2021.05.11
技术公布日:2021/12/12
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。