1.本发明属于雷达技术领域,特别涉及了一种双极化气象雷达差分相位的质量控制方法。
背景技术:
2.在双极化气象雷达中,高质量和高精度的反射率因子直接决定了雷达估计降水,识别降水粒子类型的能力。但由于空气中其他非降水粒子的影响以及存在其他电磁的干扰,使得反射率因子存在一定的衰减。双极化雷达接受的回波得到的差分相移率不受雷达电磁波能量衰减的影响,对于反射率因子的衰减订正也主要依赖于差分相移率的计算。由双极化雷达回波直接测量得到的差分相位值是由后向散射相位,降水差分相位和干扰杂波相位组成的,因此需要先对差分相位的质量进行控制来提高衰减订正中的订正精度。
技术实现要素:
3.为了解决上述背景技术提到的技术问题,本发明提出了一种双极化气象雷达差分相位的质量控制方法。
4.为了实现上述技术目的,本发明的技术方案为:
5.一种双极化气象雷达差分相位的质量控制方法,包括以下步骤:
6.(1)对双极化雷达实测差分相位进行预处理,包括对ppi显示图中的麻点状杂波、突变杂点和条幅状杂波进行处理;
7.(2)利用差分相位,水平反射率因子与差分反射率因子之间的关系,去除实测差分相位值中存在的后向差分相位误差;
8.(3)根据同一径向上差分相位的变换情况,进行lstm处理,对差分相位进行滤波;
9.(4)遍历双极化雷达射线全方位扫描所有径向的实测差分相位值,进行lstm处理;
10.(5)基于lstm处理后的差分相位值,利用反射率衰减订正算法进行反射率的衰减订正。
11.进一步地,在步骤(1)中,对麻点状杂波进行处理的方法如下:
12.设滑动窗口的大小为2m
×
2n,i表示为方位向距离库,j表示径向距离,计算窗口内有效值的距离库个数占总窗口内距离库个数的百分比,当占比小于设定阈值γ时,则认为该窗口中心数据点为非气象回波点并进行剔除处理,即:
[0013][0014]
其中,deg
i,j
为双极化雷达数据给定距离库点(i,j)的差分相位值,nan为实测的无效数据,p
i,j
为选定窗口内有效差分相位值占窗口总距离库数的百分数,当p
i,j
少于设定阈值γ时,则判断数据点(i,j)为孤立点噪声并加以剔除。
[0015]
进一步地,在步骤(1)中,对突变杂点进行处理的方法如下:
[0016]
以每个距离库为中心,利用滑动窗口对全360
°
,全距离路径上的数据进行扫描;构建大小为2m
×
2n的窗口,计算窗口内其他距离库上的差分相位值deg
i
与中心距离库的差分相位deg0差值的绝对值δdeg
i
,i=1,2,...,(2m
×
2n)
‑
1,即:
[0017]
δdeg
i
=|deg
i
‑
deg0|
[0018]
记录所得数据中大于阈值t1的个数n,若n/(2m
×
2n)
‑
1超过了阈值t2,则判定该距离库为突变杂点,剔除该距离库上的数据值;之后利用滑动窗口内的数据进行插值处理,使该距离库上的数据值满足雷达径向数据和距离向数据的变化规律。
[0019]
进一步地,在步骤(1)中,对条幅状杂波进行处理的方法如下:
[0020]
确认误差差分相位的位置,设相邻径向差分相位差:δφ
dp
=φ
dp
(j)
‑
φ
dp
(j
‑
1),其中j为径向上的距离库位置,φ
dp
为差分相位值;设参数n
th
为相邻两径向上差值大于αdb的距离库个数,n
th1
为第i行和第i
‑
1行之间的差分相位值大于αdb的距离库的个数,n
th2
为第i 1行和第i行之间差分相位值大于αdb的距离库的个数,则参数δn
th
=|n
th1
‑
n
th2
|,若δn
th
的值大于设定参数β时,则判定该径向上的数据存在误差,从而确定条幅状干扰回波的具体方位;将该条幅状干扰回波全部扣除,再采用插值法进行订正,选定以该径向的第一个距离库开始,每个距离库上构建以该距离库为中心的窗口,对窗口中的值进行均值处理。
[0021]
进一步地,在步骤(2)中,当满足瑞利散射条件时,忽略后向差分相位,在双极化气象雷达中,设定在同一径向雷达射线中,若两个距离库中测量得到的差分反射率因子的值相同,则两个距离库差分相位的差值即为降水差分相位的差值,即:
[0022]
δψ
dp
=δφ
dp
[0023]
其中,ψ
dp
表示双极化雷达直接测量得到的差分相位,φ
dp
表示降水差分相位。设雷达同一径向距离库的个数为m,设定矩阵p:
[0024][0025]
设矩阵p中每一像素点的值用p(i,j)表示,其中,i为矩阵的行,j为矩阵的列,则有:令矩阵a的第i行为a的二进制表示方式,得到矩阵a;
[0026]
设雷达实测得到的差分反射率因子为z
dr
,则有:
[0027]
δz
dr
=p
·
z
dr
[0028]
δψ
dp
=p
·
ψ
dp
[0029]
关注其中δz
dr
为0的行,对应到此时的δψ
dp
=δφ
dp
,将满足上述条件的行数记录下来,矩阵a这些对应行单独列出来得到矩阵a';
[0030]
计算其中,z
hh
表示系统实测得到的水平反射
率因子,对参数w的每一行都由该行的数据总和进行规范化得到w
norm
,计算差分相移率k
dp
:
[0031][0032][0033]
其中,δr表示单个距离单元的长度,k(i,j)和a'(i,j)分别为k和a'中每一像素点的值;
[0034]
利用差分相移率通过下式对差分相位进行重构:
[0035][0036]
其中,r
j
表示径向上第j个距离库。
[0037]
进一步地,在步骤(3)中,根据双极化雷达径向上的单位距离库长度和雷达的辐射距离长度选择lstm网络中的输入序列长度。
[0038]
进一步地,在步骤(5)中,所述反射率衰减订正算法采用降水廓线法:
[0039]
设衰减率为a
h
,雨区的范围为(r1,r0),则有:
[0040][0041][0042]
δφ
dp
=φ
dp
(r0)
‑
φ
dp
(r1)
[0043]
其中,r表示径向上距离库到雷达中心的距离,a,b为衰减订正系数,z
hh
为衰减订正前的反射率因子,φ
dp
表示降水差分相位,δφ
dp
为降水差分相位的差值;
[0044]
衰减订正公式如下:
[0045][0046]
其中,z'
hh
为衰减订正后的反射率因子,q为衰减订正系数。
[0047]
采用上述技术方案带来的有益效果:
[0048]
本发明考虑到真实情况下双极化雷达实测数据中存在的各种干扰情况,对干扰出现在ppi中的麻点状杂波、突变杂点和条幅状杂波进行处理。双极化雷达直接测量得到的差分相位包含了降水差分相位和干扰的后向差分相位。利用lstm网络的训练和预测方法,达到对降水差分相位的滤波效果。相比较传统的卡尔曼滤波方法,lstm不需要依赖计算得到的差分传播相移的值,完全依赖于测量得到的差分相位值,减少了计算差分传播相移可能引入的误差。本发明可以有效提高反射率衰减订正中存在的精度问题,提高衰减订正的稳定性。
附图说明
[0049]
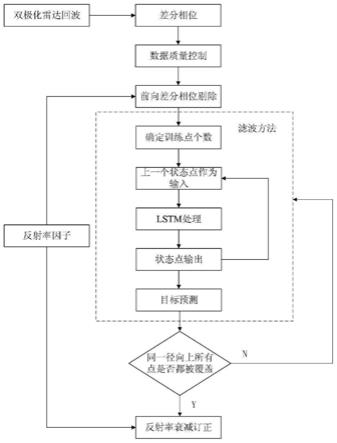
图1是本发明的整体流程图;
[0050]
图2是双极化雷达实测所得差分相位的ppi显示图;
[0051]
图3是消除麻点状杂波后差分相位的ppi显示图;
[0052]
图4是消除突变杂点后差分相位的ppi显示图;
[0053]
图5是消除条幅状杂波后差分相位的ppi显示图;
[0054]
图6是后向差分相位ppi显示图;
[0055]
图7是降水差分相位ppi显示图;
[0056]
图8是滤波前后同一径向上降水差分相位的对比图;
[0057]
图9是lstm网络的结构模块图;
[0058]
图10是衰减订正之后反射率因子的ppi显示图。
具体实施方式
[0059]
以下将结合附图,对本发明的技术方案进行详细说明。
[0060]
本发明设计了一种双极化气象雷达差分相位的质量控制方法,整体流程如图1所示。
[0061]
本实施例在已有双极化雷达系统实测数据的基础上进行的数据处理。实验所用软件和硬件配置如表1所示:
[0062]
表1实验环境
[0063][0064]
步骤如下:
[0065]
步骤1、对双极化雷达实测差分相位进行预处理,包括对ppi显示图中的麻点状杂波、突变杂点和条幅状杂波进行处理;
[0066]
步骤2、利用差分相位,水平反射率因子与差分反射率因子之间的关系,去除实测差分相位值中存在的后向差分相位误差;
[0067]
步骤3、根据同一径向上差分相位的变换情况,进行lstm处理,对差分相位进行滤波;
[0068]
步骤4、遍历双极化雷达射线全方位扫描所有径向的实测差分相位值,进行lstm处理;
[0069]
步骤5、基于lstm处理后的差分相位值,利用反射率衰减订正算法进行反射率的衰减订正。
[0070]
在本实施例中,上述步骤1采用如下优选方案实现:
[0071]
对双极化雷达实测反射率因子值的进行预处理,包括对平面位置显示图中的麻点
状杂波,突变杂点和条幅状杂波的处理。双极化气象雷达实测所得的差分相位的ppi显示图如图2所示。
[0072]
其中对麻点状杂波进行处理的主要步骤为:
[0073]
设定滑动窗口的大小为2m
×
2n,i表示为方位向距离库,j表示为径向距离,计算窗口内有效值的距离库个数占总窗口内距离库个数的百分比,当占比小于某一阈值γ时,则认为该窗口中心数据点为非气象回波点并进行剔除处理,即:
[0074][0075]
其中,deg
i,j
为双极化雷达数据给定距离库点(i,j)的差分相位值,nan为实测的无效数据,p
i,j
为选定窗口内有效差分相位值占窗口总距离库数的百分数,当p
i,j
少于设定阈值时,则判断该数据点(i,j)为孤立点噪声并加以剔除。麻点状杂波消除后的结果如图3所示。
[0076]
去除数据中突变杂点的主要步骤为:
[0077]
首先确定突变杂点的位置,以每个距离库为中心,利用滑动窗口对全360
°
,全距离路径上的数据进行扫描。仍然构建大小为2m
×
2n的小窗口,计算窗口内其他距离库上的差分相位值和中心距离库的差值。设中心距离库的差分相位为deg0,其他窗口中的差分相位值为deg
i
,有:
[0078]
δdeg
i
=|deg
i
‑
deg0|
[0079]
记录所得数据中大于阈值t1的个数n,若n/(2m
×
2n)
‑
1超过了阈值t2,则判定该距离库为突变杂点,剔除该距离库上的数据值;之后利用滑动窗口内的数据进行插值处理,使该距离库上的数据值满足雷达径向数据和距离向数据的变化规律。突变杂点的消除结果如图4所示。
[0080]
消除条幅状杂波的主要步骤为:
[0081]
(1)确认误差差分相位的位置,设定相邻径向差分相位差为:δφ
dp
=φ
dp
(j)
‑
φ
dp
(j
‑
1),其中j为径向上的距离库位置,φ
dp
为差分相位的值。设定参数n
th
为相邻两径向上差值大于αdb的距离库个数。记n
th1
为第i行和第i
‑
1行之间的差分相位值大于αdb的距离库的个数,n
th2
为第i 1行和第i行之间差分相位值大于αdb的距离库的个数。设定参数δn
th
为:δn
th
=|n
th1
‑
n
th2
|,若δn
th
的值大于某一设定的参数β时,则判定该径向上的数据存在误差。
[0082]
(2)确定条幅状干扰回波的具体方位之后,将该条幅状干扰回波全部扣除,再采用插值法进行订正,选定以该径向的第一个距离库开始,每个距离库上构建以该距离库为中心的窗口,对窗口中的值进行均值处理。最终得到的差分相位值如图5所示。
[0083]
在本实施例中,上述步骤2采用如下优选方案实现:
[0084]
当满足瑞利散射条件时,后向差分相位可以忽略,在双极化气象雷达中,设定在同一径向雷达射线中,若两个距离库中测量得到的差分反射率因子的值相同,则两个距离库差分相位的差值即为降水差分相位的差值。即:
[0085]
δψ
dp
=ψ
dp
(r
b
)
‑
ψ
dp
(r
a
)=δφ
dp
[0086]
其中,ψ
dp
表示双极化雷达直接测量得到的差分相位,φ
dp
表示降水差分相位。假定雷达同一径向距离库的个数为m,设定矩阵p为:
[0087][0088]
其中,为数学排列组合概念中的组合数。根据矩阵p的值,得到矩阵a,假定矩阵p中每一像素点的值用p(i,j)表示,其中,i为矩阵的行,j为矩阵的列,则有:则a的第i行为a的二进制表示方式(左边为低位)。
[0089]
当m为4时,矩阵a可以表示为:
[0090][0091]
设定雷达实测得到的差分反射率因子为z
dr
,则有:
[0092]
δz
dr
=p
·
z
dr
[0093]
δψ
dp
=p
·
ψ
dp
[0094]
关注其中δz
dr
为0的行,对应到此时的δψ
dp
=δφ
dp
,将满足上述条件的行数记录下来,矩阵a这些对应行单独列出来得到矩阵a'。接着计算其中参数z
hh
表示为系统实测得到的水平反射率因子。对参数w的每一行都由该行的数据总和进行规范化得到:w
norm
。则得到差分相依率k
dp
的值为:
[0095][0096][0097]
δr表示单个距离单元的长度。
[0098]
利用差分相移率通过下式对差分相位进行重构:
[0099][0100]
其中,r
j
表示径向上第j个距离库。
[0101]
得到的前向差分相位ppi显示图如图6所示。降水差分相位的ppi显示图如图7所
示。
[0102]
在本实施例中,上述步骤3采用如下优选方案实现:
[0103]
在lstm网络中,根据输入到网络中的输入序列进行网络训练,预测后面一个数据点的值。在网络训练中,输入的差分相位值序列需要进行多个点的综合学习,网络会减弱变动大的点的特征,因此对整个径向数据的预测结果起到滤波的效果。进行滤波前后的对比图如图8所示。
[0104]
lstm是一种特殊的循环神经网络,利用将上一时刻状态和该时刻的状态数据输入到网络中进行训练,利用每一时刻的训练结果来预测得到下一时刻的状态数据。通过观察降水区间内差分相位的变化情况,设定网络的输入序列,得到经过lstm处理之后的差分相位值,达到对差分相位的滤波效果。
[0105]
在本实施例中,上述步骤4采用如下优选方案实现:
[0106]
对双极化雷达全360度方位所有径向的数据都进行lstm处理。lstm的结构图如图9所示。
[0107]
在本实施例中,上述步骤5采用如下优选方案实现:
[0108]
对得到的差分反射率因子进行衰减订正,双极化雷达反射率的衰减订正算法包括差分相位订正法,降水廓线法和自适应约束算法等,本发明采用降水廓线方法为例。假定衰减率为a
h
,雨区的范围为(r1,r0),则有:
[0109][0110][0111]
δφ
dp
=φ
dp
(r0)
‑
φ
dp
(r1)
[0112]
设定衰减订正之后的反射率因子为z'
hh
,衰减订正之前反射率因子的值为z
hh
,r表示径向上距离库到雷达中心的距离,a,b为衰减订正系数,系数a与温度和液滴大小有关,需要先设定先验值,根据andger关系进行拟合得到的a为0.293。当温度一定时,b为常数。因此,在固定温度下的b取值确定,b的取值范围为(0.76,0.84)。
[0113]
则得到衰减订正的公式为:
[0114][0115]
q为衰减订正系数,取值为1.224。衰减订正之后反射率因子的ppi显示图如图10所示。
[0116]
实施例仅为说明本发明的技术思想,不能以此限定本发明的保护范围,凡是按照本发明提出的技术思想,在技术方案基础上所做的任何改动,均落入本发明保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。