技术特征:
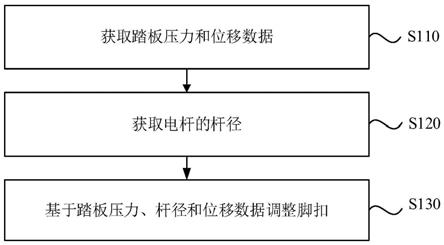
1.一种脚扣控制方法,其特征在于,脚扣包括踏板、前掌、后掌、推杆和电机,所述踏板与所述后掌固定连接,所述电机安装于所述后掌上,所述推杆与所述电机的输出轴连接,所述前掌与所述推杆连接,所述电机转动可带动所述推杆转动使所述前掌与所述后掌的距离减小或增大;所述方法包括:获取踏板压力和位移数据,所述踏板压力为工作人员作用在所述踏板上的压力值,所述位移数据为所述脚扣在电杆上移动的位移数据;获取所述电杆的杆径,所述杆径为所述脚扣的所述后掌所处位置的所述电杆的杆径;基于所述踏板压力、所述杆径和所述位移数据调整所述脚扣。2.根据权利要求1所述的脚扣控制方法,其特征在于,所述获取所述电杆的杆径,包括:获取所述电杆的锥度;基于所述位移数据和所述锥度计算所述电杆的杆径。3.根据权利要求2所述的脚扣控制方法,其特征在于,基于所述位移数据和所述锥度计算所述电杆的杆径,包括:通过以下公式计算所述电杆的当前杆径l:其中,l
′
表征所述电杆的前次杆径,x表征所述脚扣的位移值,表征所述电杆的锥度。4.根据权利要求1所述的脚扣控制方法,其特征在于,所述基于所述踏板压力、所述杆径和所述位移数据调整所述脚扣,包括:基于所述位移数据计算所述脚扣的移动速度;判断所述脚扣的踏板压力是否小于预设的压力阈值;若所述踏板压力小于所述压力阈值,则判断所述移动速度是否大于预设的速度阈值;若所述移动速度大于所述速度阈值,则控制所述脚扣锁紧所述电杆;若所述移动速度小于或等于所述速度阈值,则基于所述杆径计算脚扣调节量,调整所述脚扣的开度。5.根据权利要求4所述的脚扣控制方法,其特征在于,所述控制所述脚扣锁紧所述电杆,包括:获取所述前掌与所述后掌之间的距离值;控制所述脚扣收紧至所述距离值小于或等于所述杆径。6.根据权利要求4所述的脚扣控制方法,其特征在于,所述基于所述杆径计算脚扣调节量,调整所述脚扣的开度,包括:利用以下公式计算所述脚扣的脚扣调节量δk:其中,k为所述脚扣的目标开度,k
′
为所述脚扣的当前开度,l为当前杆径,l
′
为前次杆径,θ为所述脚扣的倾斜角度;基于所述脚扣调节量δk调整所述脚扣。7.根据权利要求6所述的脚扣控制方法,其特征在于,所述基于所述脚扣调节量δk调
整所述脚扣,包括:利用以下公式计算所述电机的转动周数n:其中,s为所述电机转动一圈所述脚扣的调整量。8.一种脚扣控制装置,其特征在于,脚扣包括踏板、前掌、后掌、推杆和电机,所述踏板与所述后掌固定连接,所述电机安装于所述后掌上,所述推杆与所述电机的输出轴连接,所述前掌与所述推杆连接,所述电机转动可带动所述推杆转动使所述前掌与所述后掌的距离减小或增大;所述装置包括:第一获取模块,用于获取踏板压力和位移数据,所述踏板压力为工作人员作用在所述踏板上的压力值,所述位移数据为所述脚扣在电杆上移动的位移数据;第二获取模块,用于获取所述电杆的杆径,所述杆径为所述脚扣的所述后掌所处位置的所述电杆的杆径;计算模块,用于基于所述踏板压力、所述杆径和所述位移数据调整所述脚扣。9.一种脚扣控制设备,其特征在于,所述设备包括:一个或多个处理器;存储装置,用于存储一个或多个程序;当所述一个或多个程序被所述一个或多个处理器执行,使得所述一个或多个处理器实现如权利要求1
‑
7中任一所述的脚扣控制方法。10.一种包含计算机可执行指令的存储介质,其特征在于,所述计算机可执行指令在由计算机处理器执行时用于执行如权利要求1
‑
7中任一所述的脚扣控制方法。
技术总结
本发明公开了一种脚扣控制方法、装置、设备及存储介质。脚扣控制方法方法包括:获取踏板压力和位移数据,踏板压力为工作人员作用在踏板上的压力值,位移数据为脚扣在电杆上移动的位移数据;获取电杆的杆径,杆径为脚扣的后掌所处位置的电杆的杆径;基于踏板压力、杆径和位移数据调整脚扣。基于踏板压力、杆径和位移数据对脚扣的开度进行调整,可有效的保证在工作人员攀爬过程中脚扣的开度与电杆的杆径匹配,使得脚扣能够始终与电杆保持特定的角度,使脚扣能够始终与电杆之间保持较大的接触面积,保证工作人员在使用脚扣进行作业时的作业安全性。业安全性。业安全性。
技术研发人员:廖圣桃 黄日光 谢志斌 曾仕沛 刘康 吕槠炫 吴梓威 曾广贤
受保护的技术使用者:广东电网有限责任公司惠州供电局
技术研发日:2021.09.09
技术公布日:2021/12/11
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。