1.本实用新型涉及机械手技术领域,尤其涉及一种智能控制机械手。
背景技术:
2.机械手为工业生产中用途最为广泛的自动搬运、抓取操作装置,可极大程度代替繁重的人力劳动。但是针对不同尺寸、不同硬度的抓取物,或受作业空间限制,经常需要更换不同形式的机械手,降低了生产效率,而且生产成本增加。
技术实现要素:
3.本实用新型的发明目的在于:针对上述存在的问题,提供一种结构紧凑,可适应不同尺寸、不同硬度抓取物的智能机械手。
4.本实用新型采用的技术方案是这样的:
5.一种智能控制机械手,包括:基板,以及位于基板一侧的电机和位于基板另一侧的传动部、滑动部、第一夹持部、第二夹持部、第一限位部和第二限位部;
6.所述电机固定安装在所述基板上,且所述电机的输出轴穿过所述基板的中心与所述传动部连接;
7.所述滑动部固定安装在所述基板上;
8.所述第一夹持部和所述第二夹持部固定安装在所述滑动部上,所述第一夹持部和所述第二夹持部相对设置,且所述第一夹持部和所述第二夹持部可在所述滑动部上滑动;
9.所述传动部包括第一反平行连杆和第二反平行连杆,所述第一反平行连杆连接在所述第一夹持部和所述电机之间,所述第二返平行连杆连接在所述第二夹持部和所述电机之间;
10.所述第一限位部安装在所述基板上,位于所述第一夹持部和所述第二夹持部中间,用于限制所述第一夹持部和所述第二夹持部之间的最近距离;
11.所述第二限位部安装在所述基板上,位于所述第一夹持部的外侧和所述第二夹持部的外侧,用于限制所述第一夹持部和所述第二夹持部之间的最远距离;
12.所述传动部将所述电机输出的动力传输给所述第一夹持部和所述第二夹持部,所述第一夹持部和所述第二夹持部通过所述传动部传输来的动力在所述滑动部上互相靠近或远离,以此形成抓取空间,并通过第一限位部和第二限位部来限制抓取空间的范围大小。
13.进一步的,所述电机的输出轴通过驱动杆分别与所述第一反平行连杆和所述第二反平行连杆连接,所述电机的输出轴连接在所述驱动杆的中心处,所述驱动杆的两端分别与所述第一反平行连杆和所述第二反平行连杆连接。
14.其中,所述驱动杆的中心开有连接孔,所述电机的输出轴上装配有电机连接套,所述电机连接套插入到所述驱动杆中心的连接孔内,并通过轴端限位结构进行定位。
15.其中,所述驱动杆的两端通过轴承分别与所述第一反平行连杆和所述第二反平行连杆连接。
16.进一步的,所述滑动部包括至少两条导轨,每条所述导轨平行安装在所述基板上,每条所述导轨上至少设置有两个滑块,所述第一夹持部和所述第二夹持部分别至少与每条所述导轨上的一个滑块连接。
17.进一步的,所述第一夹持部包括第一抓手和第一抓手固定板,所述第一抓手固定安装在所述第一抓手固定板上,所述第一抓手固定板至少与每条所述导轨上的一个滑块连接;所述第二夹持部包括第二抓手和第二抓手固定板,所述第二抓手固定安装在所述第二抓手固定板上,所述第二抓手固定板至少与每条所述导轨上的一个滑块连接。
18.进一步的,所述第一抓手和所述第二抓手采用聚氨酯或尼龙制成,所述第一抓手和所述第二抓手为中凹板块状结构。
19.进一步的,所述第一限位部包括第一限位块和第二限位块,所述第一限位块和所述第二限位块对称设置在基板上,位于所述第一夹持部和所述第二夹持部中间,以确保第一夹持部和第二夹持部之间的最近距离。
20.其中,第一限位块和第二限位块选用聚氨酯或尼龙制成,且第一限位块和第二限位块为块状结构或者弧状结构。
21.进一步的,所述第二限位部包括两组行程调整模块,两组所述行程调整模块设置在基板边缘上,分别位于所述第一夹持部的外侧和所述第二夹持部的外侧。
22.进一步的,所述行程调整模块包括安装块和长杆螺丝,所述安装块固定安装在所述基板上,所述安装块上开设有便于长杆螺丝装配的螺纹孔,所述长杆螺丝装配在所述螺纹孔内。通过调节长杆螺丝,控制第一夹持部和第二夹持部的之间的最远距离。
23.综上所述,由于采用了上述技术方案,本实用新型的有益效果是:
24.伺服电机运转时带动驱动杆转动,同时抓手固定板由反平行连杆机构带动在导轨上做开合移动,因抓手的中凹结构、较软的材质,伺服电机对抓取力量的精准控制及行程调整模块对抓手最大行程的调整,整个机械手可方便,快捷的对不同硬度和大小的物体实现抓取,提高工业生产效率,降低生产成本。
附图说明
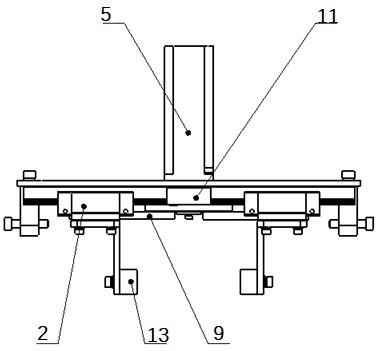
25.图1是本实用新型一实施例提供的一种智能控制机械手的正视图。
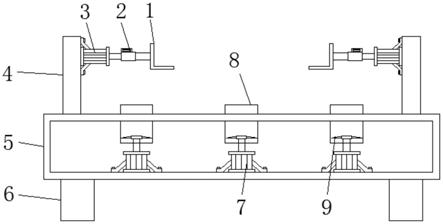
26.图2是本实用新型一实施例提供的一种智能控制机械手的等轴侧视图。
27.图3是本实用新型一实施例提供的一种智能控制机械手的仰视图。
28.附图说明:1为基板,2为导轨,3为第一抓手固定板,4为第二抓手固定板,5为电机,6为电机连接套,7为轴端限位结构,8为驱动杆,9为第一反平行连杆,10为第二反平行连杆,11为限位块,12为行程调整模块,12
‑
1为安装块,12
‑
2为长杆螺丝,13为第一抓手,14为第二抓手。
具体实施方式
29.为使本实用新型实施例的目的、技术方案和优点更加清楚,下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本实用新型一部分实施例,而不是全部的实施例。通常在此处附图中描述和示出的本实用新型实施例的组件可以以各种不同的配置来布置和设计。
30.实施例1
31.如图1、图2、图3所示,本实施例提供一种智能控制机械手,该机械手包括用于提供动力的电机5、用于实现抓取物件的第一夹持部和第二夹持部、用于实现带动第一夹持部和第二夹持部运动的传动部、用于辅助第一夹持部和第二夹持部滑动的滑动部、用于限制第一夹持部和第二夹持部之间最近距离的第一限位部、用于限制第一夹持部和第二夹持部之间最远距离的第二限位部、以及用于安装电机5、第一夹持部、第二夹持部、传动部、滑动部、第一限位部和第二限位部的基板1。
32.具体的,在本实施例中,电机5用螺钉固定在基板1的中心圆孔处,电机5处于基板1的上方,且电机5的输出轴穿过基板1的中心圆孔与基板1下方的传动部连接。
33.其中,电机5的输出轴下方通过电机连接套6连接有驱动杆8,电机5的输出轴与电机连接套6之间键连接,电机连接套6为圆柱形结构,电机连接套6外圆下部插入到驱动杆8的中心孔处,并用轴端限位结构7定位,电机连接套6和驱动杆8下平面齐平,驱动杆8位于基板1的下方,且两端端头开有通孔,用于与传动部连接。
34.其中,驱动杆8优选为扁平板状结构,次选为圆形或弧形结构。
35.具体的,在实施例中,传动部包括第一反平行连杆9和第二反平行连杆10,第一反平行连杆9一端通过轴承与驱动杆8一端端头上的通孔配合连接在一起,另外一端与第一夹持部连接在一起;第二反平行连杆10的一端通过轴承与驱动杆8另一端端头上的通孔配合连接在一起,另外一端与第二夹持部连接在一起。
36.其中,两套反平行连杆优选为扁平板状结构,次选为圆形或弧形结构。
37.具体的,在本实施例中,滑动部包括两条导轨,每条导轨上设置有两个可以在导轨上滑动的滑块,如图2所示,两条导轨平行安装在基板1的两侧。
38.具体的,在本实施例中,第一夹持部包括第一抓手13和第一抓手固定板3,第一抓手13通过螺钉固定在第一抓手固定板3上,第一抓手固定板3的两端皆开有与滑块连接的安装孔,第一抓手固定板3的两端分别与基板1两侧的导轨2上的滑块连接,另外,第一反平行连杆9采用轴承与轴连接的方式连接在第一抓手固定板3上,用于将电机5的动力传输给第一抓手固定板3,与滑块连接后的第一抓手固定板3,在第一反平行连杆9的带动下,可以带着第一抓手13在两条平行的导轨2上滑动。
39.第二夹持部与第一夹持部相同,第二夹持部包括第二抓手14和第二抓手固定板4,第二抓手14通过螺钉固定在第二抓手固定板4上,第二抓手固定板4的两端皆开有与滑块连接的安装孔,第二抓手固定板4的两端分别与基板1两侧的导轨2上的滑块连接,另外,第二反平行连杆10采用轴承与轴连接的方式连接在第二抓手固定板4上,用于将电机5的动力传输给第二抓手固定板4,与滑块连接后的第二抓手固定板4,在第二反平行连杆10的带动下,可以带着第二抓手14在两条平行的导轨2上滑动。
40.通过两套反平行连杆带来的动力,两个抓手在导轨2上可以互相靠近或远离,以此来形成抓取空间。
41.具体的,在本实施例中,第一限位部包括两个限位块11,两个限位块11分别安装在基板1中间两侧,位于第一夹持部和第二夹持部的中间,两个限位块11采用螺栓的方式安装在基板1上,用于限制第一夹持部和第二夹持部之间的最近距离。
42.具体的,在本实施例中,第二限位部包括两组行程调整模块12,两组行程调整模块
12设置在基板1边缘上,分别位于第一夹持部的外侧和第二夹持部的外侧,用于限制第一夹持部和第二夹持部之间的最远距离。
43.本实施例提供的一种智能控制机械手的操控流程如下:
44.电机输出轴通过电机连接套6将旋转运动传递到驱动杆8,驱动杆8的转动运动拉动反平行连杆机构做平面开或合动作,与反平行连杆机构连接的抓手固定板带动两个抓手实现张开和合拢动作,达到对抓取物的抓取和放置,抓手固定板的开合在两组导轨滑块上实现。
45.实施例2
46.本实施例在实施例1的基础上作出了进一步改进,在本实施例中,行程调整模块12包括安装块12
‑
1和长杆螺丝12
‑
2,安装块12
‑
1固定安装在基板1的两端边缘,安装块12
‑
1上开设有便于长杆螺丝12
‑
2装配的螺纹孔,长杆螺丝12
‑
2装配在螺纹孔内。通过调节长杆螺丝12
‑
2,控制第一夹持部和第二夹持部的之间的最远距离。
47.实施例3
48.本实施例与实施例1或实施例2基本一致,其区别在于,在本实施例中,电机连接套6为圆柱带法兰盘式结构,且电机连接套6与驱动杆8采用法兰连接方式连接,法兰面位于驱动杆8的上面。
49.以上所述仅为本实用新型的较佳实施例而已,并不用以限制本实用新型,凡在本实用新型的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本实用新型的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。