技术特征:
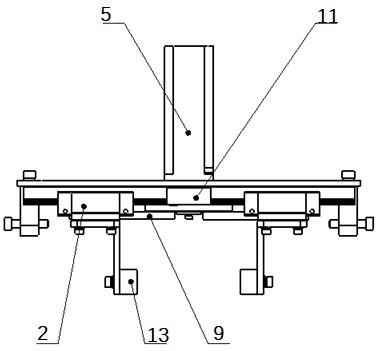
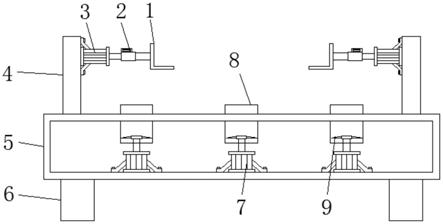
1.一种智能控制机械手,其特征在于,包括:基板,以及位于基板一侧的电机和位于基板另一侧的传动部、滑动部、第一夹持部、第二夹持部、第一限位部和第二限位部;所述电机固定安装在所述基板上,且所述电机的输出轴穿过所述基板的中心与所述传动部连接;所述滑动部固定安装在所述基板上;所述第一夹持部和所述第二夹持部固定安装在所述滑动部上,所述第一夹持部和所述第二夹持部相对设置,且所述第一夹持部和所述第二夹持部可在所述滑动部上滑动;所述传动部包括第一反平行连杆和第二反平行连杆,所述第一反平行连杆连接在所述第一夹持部和所述电机之间,所述第二反平行连杆连接在所述第二夹持部和所述电机之间;所述第一限位部安装在基板上,位于所述第一夹持部和所述第二夹持部中间,用于限制所述第一夹持部和所述第二夹持部之间最近距离;所述第二限位部安装在基板上,位于所述第一夹持部的外侧和所述第二夹持部的外侧,用于限制所述第一夹持部和所述第二夹持部之间的最远距离;所述传动部将所述电机输出的动力传输给所述第一夹持部和所述第二夹持部,所述第一夹持部和所述第二夹持部通过所述传动部传输来的动力在所述滑动部上互相靠近或远离,以此形成抓取空间。2.根据权利要求1所述的一种智能控制机械手,其特征在于,所述电机的输出轴通过驱动杆分别与所述第一反平行连杆和所述第二反平行连杆连接,所述电机的输出轴连接在所述驱动杆的中心处,所述驱动杆的两端分别与所述第一反平行连杆和所述第二反平行连杆连接。3.根据权利要求2所述的一种智能控制机械手,其特征在于,所述驱动杆的中心开有连接孔,所述电机的输出轴上装配有电机连接套,所述电机连接套插入到所述驱动杆中心的连接孔内,并通过轴端限位结构进行定位。4.根据权利要求2所述的一种智能控制机械手,其特征在于,所述驱动杆的两端通过轴承分别与所述第一反平行连杆和所述第二反平行连杆连接。5.根据权利要求1所述的一种智能控制机械手,其特征在于,所述滑动部包括至少两条导轨,每条所述导轨平行安装在所述基板上,每条所述导轨上至少设置有两个滑块,所述第一夹持部和所述第二夹持部分别至少与每条所述导轨上的一个滑块连接。6.根据权利要求5所述的一种智能控制机械手,其特征在于,所述第一夹持部包括第一抓手和第一抓手固定板,所述第一抓手固定安装在所述第一抓手固定板上,所述第一抓手固定板至少与每条所述导轨上的一个滑块连接;所述第二夹持部包括第二抓手和第二抓手固定板,所述第二抓手固定安装在所述第二抓手固定板上,所述第二抓手固定板至少与每条所述导轨上的一个滑块连接。7.根据权利要求6所述的一种智能控制机械手,其特征在于,所述第一抓手和所述第二抓手采用聚氨酯或尼龙制成,所述第一抓手和所述第二抓手为中凹板块状结构。8.根据权利要求1或5所述的一种智能控制机械手,其特征在于,所述第一限位部包括第一限位块和第二限位块,所述第一限位块和所述第二限位块对称设置在基板上,位于所述第一夹持部和所述第二夹持部中间。
9.根据权利要求1或5所述的一种智能控制机械手,其特征在于,所述第二限位部包括两组行程调整模块,两组所述行程调整模块设置在基板边缘上,分别位于所述第一夹持部的外侧和所述第二夹持部的外侧。10.根据权利要求9所述的一种智能控制机械手,其特征在于,所述行程调整模块包括安装块和长杆螺丝,所述安装块固定安装在所述基板上,所述安装块上开设有便于长杆螺丝装配的螺纹孔,所述长杆螺丝装配在所述螺纹孔内。
技术总结
本实用新型涉及机械手技术领域,公开了一种智能控制机械手,该智能控制机械手包括基板、以及安装在基板上侧的电机、安装在基板下侧的滑动部、传动部、第一夹持部、第二夹持部、第一限位部和第二限位部,第一夹持部和第二夹持部安装在滑动部上,传动部连接在夹持部和电机之间,第一夹持部和第二夹持部通过电机带动在滑动部上进行滑动,互相靠近或远离,以此形成抓取空间,第一限位部设置在两个夹持部之间,用于限制两者之间的最近距离,第二夹持部设置在两个夹持部的外侧,用于限制两者之间的最远距离。本实用新型提供的智能控制机械手操作方便、快捷,提高了工业的生产效率,降低了生产成本。产成本。产成本。
技术研发人员:孙文俊 王恩良 江强 杨浩 梁强 杨柳依依
受保护的技术使用者:成都市皓煊光电新材料科技研发中心有限公司
技术研发日:2021.11.04
技术公布日:2021/12/11
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。