技术特征:
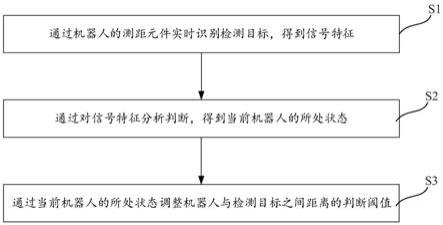
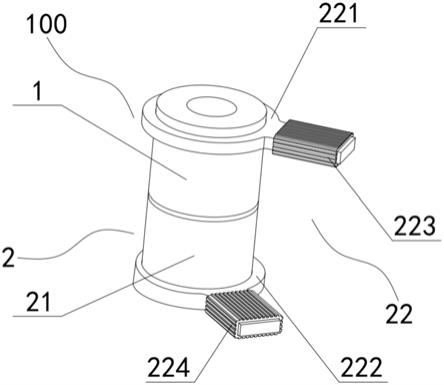
1.一种机器人,其特征在于,包括:机器人本体和控制单元,所述机器人本体上设置有与所述控制单元通信连接的测距元件;所述测距元件用于实时识别检测目标,得到信号特征并将所述信号特征传送至所述控制单元;所述控制单元,用于根据所述测距元件得到所述信号特征实时调整机器人与检测目标之间距离的判断阈值。2.根据权利要求1所述的机器人,其特征在于,所述控制单元用于根据所述测距元件的所述信号特征判断当前所述机器人本体处于越障状态,降低机器人与检测目标之间距离的判断阈值。3.根据权利要求1所述的机器人,其特征在于,所述控制单元包括状态判断子单元,所述状态判断子单元用于根据所述测距元件识别信号逐渐下降的信号特征,判断当前所述机器人本体处于越障状态。4.根据权利要求3所述的机器人,其特征在于,所述状态判断子单元用于根据所述测距元件识别信号瞬间急剧下降的信号特征,判断当前所述机器人本体处于跌落状态。5.根据权利要求1所述的机器人,其特征在于,所述机器人本体上安装有至少三个所述测距元件,三个所述测距元件分别为前测距元件、左测距元件和右测距元件,所述控制单元用于根据任意一个所述测距元件得到的所述信号特征判断当前所述机器人本体处于越障状态,实时降低机器人与检测目标之间距离的判断阈值。6.一种机器人越障控制方法,其特征在于,包括以下步骤:通过机器人的测距元件实时识别检测目标,得到信号特征;通过对所述信号特征分析判断,得到当前机器人的所处状态;通过当前机器人的所处状态调整机器人与检测目标之间距离的判断阈值。7.根据权利要求6所述的机器人越障控制方法,其特征在于,通过对所述信号特征分析判断,得到当前机器人的所处状态包括:若所述测距元件识别信号逐渐下降的信号特征,则当前机器人处于越障状态;若所述测距元件识别信号瞬间急剧下降的信号特征,则当前机器人处于跌落状态。8.根据权利要求6所述的机器人越障控制方法,其特征在于,通过当前机器人的所处状态调整机器人与检测目标之间距离的判断阈值包括:若当前机器人的所处状态为越障状态,降低机器人与检测目标之间距离的判断阈值。9.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质用于存储计算机指令,当其在计算机上运行时,使得计算机执行如权利要求6
‑
8任意一项所述的机器人越障控制方法。10.一种基于信号特征变化的机器人越障控制设备,其特征在于,包括处理器以及存储器;所述存储器,用于存储程序代码,并将所述程序代码传输给所述处理器;所述处理器,用于根据所述程序代码中的指令执行如权利要求6
‑
8任意一项所述的机器人越障控制方法。
技术总结
本申请涉及一种机器人及机器人越障控制方法、存储介质和设备,机器人包括:机器人本体和控制单元,机器人本体上设置有与控制单元通信连接的测距元件;测距元件用于实时识别检测目标,得到信号特征并将信号特征传送至控制单元;控制单元,用于根据测距元件得到信号特征实时调整机器人与检测目标之间距离的判断阈值,使得机器人在越障时不会因信号特征变弱而误判,确保机器人的越障效果。解决了现有移动机器人防跌落功能的判断逻辑存在弊端,易出现执行错误动作导致机器人无法成功越障的技术问题。问题。问题。
技术研发人员:ꢀ(74)专利代理机构
受保护的技术使用者:广州科语机器人有限公司
技术研发日:2021.09.06
技术公布日:2021/12/11
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。