1.本实用新型涉及卡板自动搬运结构,尤其是涉及一种组卡设备用真空搬运机械手。
背景技术:
2.在卡板加工的现有设备中,一般都采用会vy轴向配合实现卡板的搬运,其结构一般包括x轴向滑轨、y轴向滑轨,x、y轴向通过滑块可滑动的相连;该结构因部件多、结构较为复杂,导致出现故障概率增加,提高卡板加工设备的维修概率,提高维护成本,也影响加工效率。
3.因此,如何改进现有结构,简化搬运卡板的结构是本领域技术人员需要解决的技术问题之一。
技术实现要素:
4.为解决上述问题,本实用新型公开一种组卡设备用真空搬运机械手的技术方案,其包括门架、位移机构及搬运手,其中:
5.所述门架为一开口朝下的框架式支撑架;
6.所述位移机构包括位移座及联动杆,所述位移座固定于所述门架,该位移座上开设有实现双向调节的位移导槽,所述联动杆的一端可滑动的接于所述位移导槽内;
7.所述搬运手接于所述联动杆的另一端。
8.进一步优选的:所述位移导槽为倒置的u形槽,其开口向的两端为两个搬运工位。
9.进一步优选的:所述两个搬运工位旁均设置有传感器。
10.进一步优选的:所述联动杆包括主动杆、从动件及从动杆,其中:
11.所述主动杆由一电机驱动旋转,该主动杆开设有安装孔,所述从动件装于所述安装孔内,并沿所述位移导槽方向滑动位移,所述从动杆装于所述从动件上。
12.进一步优选的:所述主动杆为一l形杆体,其转角处与所述电机的输出端相连,所述安装孔开设于所述主动杆的一端处。
13.进一步优选的:所述从动杆为一滑杆组,其包括纵向滑动连接的升降杆及滑动座,其中:
14.所述升降杆为一滑杆,且其一端接于所述从动件上;
15.所述滑动座固定于一滑块上,所述滑块滑动接于一横向滑轨上,所述横向滑轨位于所述位移座下方,且横置于所述位移导槽的开口端。
16.进一步优选的:所述搬运手为可沿所述升降杆方向滑动调节的真空吸盘。
17.进一步优选的:所述升降杆靠近所述搬运手的一端设置有限位挡块,以限制所述搬运手的滑动行程。
18.与现有技术相比,本实用新型具有下述优点:
19.本实用新型利用双向调节的位移导槽,形成所述联动杆搬运位移的导向、限位,从
而简化现有技术中需要x、y轴向分别调节实现搬运的结构,降低维修概率,从而提高加工效率、降低成本。
附图说明
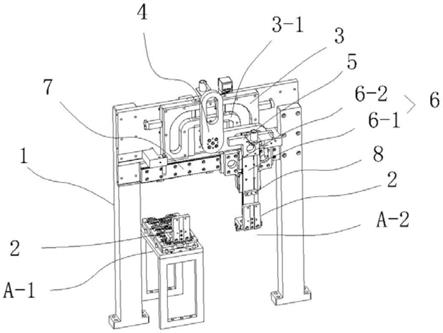
20.图1是本实用新型实施例中所述组卡设备用真空搬运机械手的结构示意图;
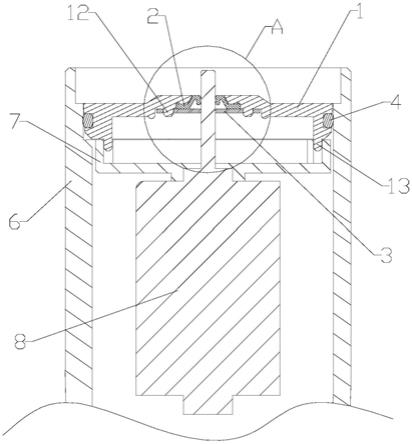
21.图2本实用新型实施例中所述组卡设备用真空搬运机械手另一角度的结构示意图。
具体实施方式
22.在卡板加工的现有设备中,一般都采用会vy轴向配合实现卡板的转运,其结构一般为x轴向滑轨、y轴向滑轨,x、y轴向通过滑块可滑动的相连;该结构因部件多、结构较为复杂,导致出现故障概率增加,提高卡板加工设备的维修概率,提高维护成本,也影响加工效率。
23.发明人针对上述技术问题,经过对原因的分析,不断研究发现一种组卡设备用真空搬运机械手的技术方案,其包括门架、位移机构及搬运手,其中:
24.所述门架为一开口朝下的框架式支撑架;
25.所述位移机构包括位移座及联动杆,所述位移座固定于所述门架,该位移座上开设有实现双向调节的位移导槽,所述联动杆的一端可滑动的接于所述位移导槽内;
26.所述搬运手接于所述联动杆的另一端。
27.上述技术方案中,其利用双向调节的位移导槽,形成所述联动杆搬运位移的导向、限位,简化现有技术中需要x、y轴向分别调节实现搬运的结构,降低维修概率,从而提高加工效率、降低成本,进而解决现有技术中存在的技术问题。
28.下面结合附图对本实用新型的具体实施方式做详细的说明。
29.实施例:
30.如图1及图2所示,一种组卡设备用真空搬运机械手,其包括门架1、位移机构及搬运手2。
31.如图1及图2所示,所述门架1为一开口朝下的框架式支撑架;具体的说:所述门架1为一倒置的u形框架,其开口端可固定于组卡设备中的加工平台之上;该门架1包括一体相连的横梁及两个支撑杆,所述两个支撑杆分别位于所述横梁的两端。
32.如图1及图2所示,所述位移机构包括位移座3及联动杆,所述位移座3固定于所述门架1的横梁上,所述位移座3为一矩形板体,该位移座3上开设有实现双向调节的位移导槽3-1,所述位移导槽3-1为倒置的u形槽,其开口向的两端为两个搬运工位,即第一工位a-1及第二工位a-2;
33.所述联动杆的一端可滑动的接于所述位移导槽3-1内,且其包括主动杆4、从动件5及从动杆6;所述主动杆4由一电机b驱动旋转,该主动杆4开设有安装孔4-1,所述从动件5装于所述安装孔4-1内,并沿所述位移导槽3-1方向滑动位移,所述从动杆6装于所述从动件5上卡板料仓;具体的说:所述主动杆4为一l形杆体,其转角处于所述电机b的输出端相连,所述安装孔4-1开设于所述主动杆4的一端处;所述电机b的输出端穿过门架1的横梁,与所述主动杆6相连,并形成联动机构;
34.所述从动杆6为一滑杆组,其包括升降杆6-1及滑动座6-2;所述升降杆6-1为一滑杆,且其一端接于所述从动件5上;所述滑动座6-2固定于一滑块上,所述滑块滑动接于一横向滑轨7上,所述横向滑轨7-位于所述位移座3下方,且横置于所述位移导槽3-1的开口端;具体的说:所述横向滑轨7为条形的板体,且固定于所述门架1的横梁上,该横向滑轨7位于所述位移座3的下方,且其上滑动连接有所述滑块,所述滑块上固定有纵向设置的所述滑动座,所述滑动座上滑动连接有所述升降杆6-1,所述升降杆6-1为一条状板体,其下端为安装端;
35.如图1及图2所示,当所述电机b旋转,驱动所述主动杆4旋转,又因所述从动件5沿所述位移导槽3-1方向滑动;同时,所述从动件5驱动所述从动杆6,因所述从动杆6被所述横向滑轨7限制,使得所述从动杆6于两个同高的位移工位之间往复运动,进而实现产品的搬运。
36.如图1及图2所示,所述搬运手2为一真空式搬运手,且接于所述联动杆的另一端;所述搬运手2为可沿所述升降杆6-1方向滑动调节的真空吸盘,且接于所述升降杆6-1的安装端,所述升降杆6-1靠近所述搬运手2的一端设置有限位挡块8,以限制所述搬运手的滑动行程。
37.如图1及图2所示,所述两个搬运工位旁均设置有传感器9。
38.本实用新型虽然以较佳实施例公开如上,但其并不是用来限定本实用新型,任何本领域技术人员在不脱离本实用新型的精神和范围内,都可以做出可能的变动和修改,因此本实用新型的保护范围应当以本实用新型权利要求所界定的范围为准。
技术特征:
1.组卡设备用真空搬运机械手,其特征在于:其包括门架、位移机构及搬运手,其中:所述门架为一开口朝下的框架式支撑架;所述位移机构包括位移座及联动杆,所述位移座固定于所述门架,该位移座上开设有实现双向调节的位移导槽,所述联动杆的一端可滑动的接于所述位移导槽内;所述搬运手接于所述联动杆的另一端。2.根据权利要求1所述的组卡设备用真空搬运机械手,其特征在于:所述位移导槽为倒置的u形槽,其开口向的两端为两个搬运工位。3.根据权利要求2所述的组卡设备用真空搬运机械手,其特征在于:所述两个搬运工位旁均设置有传感器。4.根据权利要求1所述的组卡设备用真空搬运机械手,其特征在于:所述联动杆包括主动杆、从动件及从动杆,其中:所述主动杆由一电机驱动旋转,该主动杆开设有安装孔,所述从动件装于所述安装孔内,并沿所述位移导槽方向滑动位移,所述从动杆装于所述从动件上。5.根据权利要求4所述的组卡设备用真空搬运机械手,其特征在于:所述主动杆为一l形杆体,其转角处与所述电机的输出端相连,所述安装孔开设于所述主动杆的一端处。6.根据权利要求4所述的组卡设备用真空搬运机械手,其特征在于:所述从动杆为一滑杆组,其包括纵向滑动连接的升降杆及滑动座,其中:所述升降杆为一滑杆,且其一端接于所述从动件上;所述滑动座固定于一滑块上,所述滑块滑动接于一横向滑轨上,所述横向滑轨位于所述位移座下方,且横置于所述位移导槽的开口端。7.根据权利要求6所述的组卡设备用真空搬运机械手,其特征在于:所述搬运手为可沿所述升降杆方向滑动调节的真空吸盘。8.根据权利要求7所述的组卡设备用真空搬运机械手,其特征在于:所述升降杆靠近所述搬运手的一端设置有限位挡块,以限制所述搬运手的滑动行程。
技术总结
本实用新型涉及组卡的卡板自动搬运结构,尤其是涉及一种组卡设备用真空搬运机械手,其包括门架、位移机构及搬运手;所述门架为一开口朝下的框架式支撑架;所述位移机构包括位移座及联动杆,所述位移座固定于所述门架,该位移座上开设有实现双向调节的位移导槽,所述联动杆的一端可滑动的接于所述位移导槽内;所述搬运手接于所述联动杆的另一端。本实用新型利用双向调节的位移导槽,形成所述联动杆搬运位移的导向、限位,简化现有技术中需要X、Y轴向分别调节实现搬运的结构,降低维修概率,从而提高加工效率、降低成本,进而解决现有技术中存在的技术问题。在的技术问题。在的技术问题。
技术研发人员:侯红科 聂素丽 林惠玲 陈福星
受保护的技术使用者:厦门南洋职业学院
技术研发日:2021.05.02
技术公布日:2021/12/11
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。