1.本技术涉及垃圾桶技术领域,具体为一种智能分离垃圾桶。
背景技术:
2.垃圾桶,又名废物箱或垃圾箱,是指装放垃圾的容器。多数以金属或塑胶制,用时放入塑料袋,当垃圾一多便可扎起袋丢掉。垃圾桶是人们生活中“藏污纳垢”的容器,也是社会文化的一种折射,多数垃圾桶都有盖以防垃圾的异味四散,有些垃圾桶可以以脚踏开启,家居的垃圾桶多数放于厨房,以便放置厨余,有些家庭会在主要房间都各置一,有些游乐场的垃圾桶会特别设计成可爱的人物。
3.现在的垃圾桶在使用时,往往一个塑料桶,用户将所有垃圾均放在一个垃圾桶内,并不对垃圾进行分类,不方便垃圾的处理,现有的可分类垃圾桶,只是将多个垃圾桶并排放在一起,在用户投放垃圾时,还需要用户根据垃圾的分类,分别投放在不同的垃圾桶内,极易出现误放的现象。
4.申请内容
5.针对现有技术中的上述不足,本技术提供了一种智能分离垃圾桶,其采用技术方案如下:
6.一种智能分离垃圾桶,包括机壳、驱动电机和用于控制驱动电机的电路控制器件,所述驱动电机的输出端固定连接有螺纹转轴,所述螺纹转轴的外表面螺纹连接有螺纹套筒,所述螺纹套筒的外表面固定连接有待分类箱体,所述机壳的内部底壁上开设有四个滑槽,所述滑槽的内部滑动连接有滑块,所述滑块的上表面均固定连接有垃圾桶,所述机壳的上表面开设有进料口,所述机壳的上表面设置有活动式挡板,所述活动式挡板的下表面镶嵌有ai高清图像识别分离处理装置。
7.优选的,所述机壳的内部侧壁之间固定连接有滑竿,所述滑竿的高度位置与螺纹转轴的高度位置相当,且相互平行设置,所述滑竿的外表面套设有滑套,所述滑套与所述待分类箱体固定连接。
8.优选的,所述待分类箱体的侧壁之间通过轴承转动连接有两根相互平行的转动杆,两个所述转动杆的外表面均固定连接有挡门,两根所述转动杆的一端均贯穿并延伸至所述待分类箱体的外侧,且固定连接有蜗轮,所述待分类箱体的外表面固定连接有马达,所述待分类箱体的外表面通过轴承转动连接有与其相互平行设置的蜗杆,所述蜗杆的外表面与所述马达的输出端均固定连接有齿轮,两个所述齿轮相互啮合,所述蜗杆与两个所述蜗轮啮合。
9.优选的,所述机壳的左侧面固定连接有电机底座,所述电机底座的上表面与所述驱动电机固定连接。
10.优选的,四个所述垃圾桶从左至右依次为湿垃圾暂存桶、干垃圾暂存桶、可回收垃圾暂存桶和有害垃圾暂存桶。
11.优选的,所述机壳的上表面固定连接有阻水立条,所述机壳的外表面设有可组右
移动的装饰门。
12.优选的,所述机壳的下表面固定连接有四个水平误差调节脚。
13.优选的,所述电路控制器件包括电源模块、控制器、红外线感应器和电机行程控制器,所述红外线感应器安装在活动式挡板的下方,用于检测所述待分类箱体内是否有垃圾,并在其检测到垃圾时,向ai高清图像识别分离处理装置发出信号;所述ai高清图像识别分离处理装置在接受信号后启动,然后对待处理垃圾箱内的垃圾进行分类识别,将垃圾分为湿垃圾、干垃圾、可回收垃圾和有害垃圾,并根据垃圾的种类发出不同的信号;所述控制器在接收到ai高清图像识别分离处理装置发出的信号后,向所述电机行程控制器发出对应的信号,所述电机行程控制器在接受到信号后启驱动电机,在所述驱动安电机达到工作行程时,关闭所述驱动电机,并向所述控制器发出反馈信号,所述控制器在接受到反馈信号后控制马达正转十秒,然后停止三十秒后,控制马达反转,并向所述电机行程控制器发出复位信号,所述电机行程控制器在接受到复位信号后启驱动电机。
14.与现有技术相比,本技术的方案具备以下有益效果:
15.(1)该智能分离垃圾桶,在使用时,用户拉开活动式挡板,将垃圾通过进料口投入待分类箱体,驱动电机带动螺纹转轴旋转,使螺纹套筒沿着滑竿的方向,移动至对应的垃圾桶的上方,通过设置的马达,马达通过齿轮带动蜗杆旋转,蜗杆带动两个蜗轮旋转,蜗轮带动两个转动杆旋转,使挡门打开,在重力的作用下,使待处理箱体内的物料落至对应的垃圾桶内,起到垃圾分类的效果,用户只需要将分类后的垃圾放入待分类箱体内即可,操作简单,使用方便。
16.(2)该智能分离垃圾桶,在使用时,通过设置的红外线感应器,用于检测待分类箱体内是否有垃圾,并在其检测到垃圾时,向ai高清图像识别分离处理装置发出信号;ai高清图像识别分离处理装置在接受信号后启动,然后对待处理垃圾箱内的垃圾进行分类识别,将垃圾分为湿垃圾、干垃圾、可回收垃圾和有害垃圾,并根据垃圾的种类发出不同的信号;控制器在接收到ai高清图像识别分离处理装置发出的信号后,向电机行程控制器发出对应的信号,电机行程控制器在接受到信号后启驱动电机,在驱动安电机达到工作行程时,此时待处理垃圾箱处于对应的垃圾桶的上方,关闭驱动电机,并向控制器发出反馈信号,控制器在接受到反馈信号后控制马达正转十秒,使两个挡门打开,在重力的作用下,使待处理箱体内的物料落至对应的垃圾桶内,然后停止三十秒后,使垃圾全部落入垃圾桶内后,控制马达反转,并向电机行程控制器发出复位信号,电机行程控制器在接受到复位信号后启驱动电机,使的待处理垃圾箱移动至活动式挡板的后方即可。
附图说明
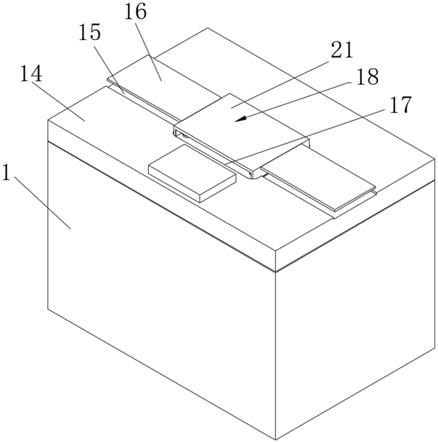
17.图1为本技术的结构示意图;
18.图2为本技术的图1中a
‑
a的结构示意图;
19.图3为本技术的图1中b的结构放大图;
20.图4为本技术的电路控制器件结构框图。
21.图中:1、机壳;2、驱动电机;3、电路控制器件;4、螺纹转轴;5、螺纹套筒;6、待分类箱体;7、滑槽;8、滑块;9、垃圾桶;10、进料口;11、活动式挡板;12、ai高清图像识别分离处理装置;13、滑竿;14、转动杆;15、挡门;16、蜗轮;17、马达;18、蜗杆;19、齿轮;301、电源模块;
302、控制器;303、红外线感应器;304、电机行程控制器。
具体实施方式
22.下面将结合本技术实施例中的附图,对本技术实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本技术一部分实施例,而不是全部的实施例。基于本技术中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本技术保护的范围。
23.请参阅图1
‑
4,一种智能分离垃圾桶,包括机壳1、驱动电机2和用于控制驱动电机2的电路控制器件3,驱动电机2的输出端固定连接有螺纹转轴4,螺纹转轴4的外表面螺纹连接有螺纹套筒5,螺纹套筒5的外表面固定连接有待分类箱体6,机壳1的内部底壁上开设有四个滑槽7,滑槽7的内部滑动连接有滑块8,滑块8的上表面均固定连接有垃圾桶9,机壳1的上表面开设有进料口10,机壳1的上表面设置有活动式挡板11,活动式挡板11的下表面镶嵌有ai高清图像识别分离处理装置12。
24.进一步的,机壳1的内部侧壁之间固定连接有滑竿13,滑竿13的高度位置与螺纹转轴4的高度位置相当,且相互平行设置,滑竿13的外表面套设有滑套,滑套与待分类箱体6固定连接,起到保证待分类箱体6沿着滑竿13的方形移动的效果。
25.进一步的,待分类箱体6的侧壁之间通过轴承转动连接有两根相互平行的转动杆14,两个转动杆14的外表面均固定连接有挡门15,两根转动杆14的一端均贯穿并延伸至待分类箱体6的外侧,且固定连接有蜗轮16,待分类箱体6的外表面固定连接有马达17,待分类箱体6的外表面通过轴承转动连接有与其相互平行设置的蜗杆18,蜗杆18的外表面与马达17的输出端均固定连接有齿轮19,两个齿轮19相互啮合,蜗杆18与两个蜗轮16啮合,马达17通过齿轮19带动蜗杆18旋转,蜗杆18带动两个蜗轮16旋转,蜗轮16带动两个转动杆14旋转,使挡门15打开,在重力的作用下,使待处理箱体6内的物料落至对应的垃圾桶9内。
26.进一步的,机壳1的左侧面固定连接有电机底座,电机底座的上表面与驱动电机2固定连接,为驱动电机2提供支撑力,若装置位于室外,可在驱动电机2的外表面套设保护壳。
27.进一步的,四个垃圾桶9从左至右依次为湿垃圾暂存桶、干垃圾暂存桶、可回收垃圾暂存桶和有害垃圾暂存桶,起到分类储存垃圾的效果。
28.进一步的,机壳1的上表面固定连接有阻水立条,机壳1的外表面设有可组右移动的装饰门,起到方便清理垃圾桶9内物料的效果,在清理垃圾桶9时,工作人员应检查挡门15的外表面是否粘接有垃圾,并将其清理。
29.进一步的,机壳1的下表面固定连接有四个水平误差调节脚,起到放置稳固的效果。
30.进一步的,电路控制器件3包括电源模块301、控制器302、红外线感应器303和电机行程控制器304,红外线感应器303安装在活动式挡板11的下方,用于检测待分类箱体6内是否有垃圾,并在其检测到垃圾时,向ai高清图像识别分离处理装置12发出信号;ai高清图像识别分离处理装置12在接受信号后启动,然后对待处理垃圾箱6内的垃圾进行分类识别,将垃圾分为湿垃圾、干垃圾、可回收垃圾和有害垃圾,并根据垃圾的种类发出不同的信号;控制器302在接收到ai高清图像识别分离处理装置12发出的信号后,向电机行程控制器304发
出对应的信号,电机行程控制器304在接受到信号后启驱动电机2,在驱动安电机2达到工作行程时,关闭驱动电机2,并向控制器302发出反馈信号,控制器302在接受到反馈信号后控制马达17正转十秒,然后停止三十秒后,控制马达17反转,并向电机行程控制器304发出复位信号,电机行程控制器304在接受到复位信号后启驱动电机2。
31.实施例,具体的,可在机壳1的上表面安装气缸,启动气缸时,气缸带动活动式挡板11移动,将进料口10打开30秒后,气缸带动活动至当帮11复位,其它与工作流程与实施例1相同。
32.综上所述,该智能分离垃圾桶,在使用时,用户拉开活动式挡板11,将垃圾通过进料口10投入待分类箱体6,驱动电机2带动螺纹转轴4旋转,使螺纹套筒5沿着滑竿13的方向,移动至对应的垃圾桶9的上方,通过设置的马达17,马达17通过齿轮19带动蜗杆18旋转,蜗杆18带动两个蜗轮16旋转,蜗轮16带动两个转动杆14旋转,使挡门15打开,在重力的作用下,使待处理箱体6内的物料落至对应的垃圾桶9内,起到垃圾分类的效果,用户只需要将分类后的垃圾放入待分类箱体6内即可,操作简单,使用方便。
33.该智能分离垃圾桶,在使用时,通过设置的红外线感应器303,用于检测待分类箱体6内是否有垃圾,并在其检测到垃圾时,向ai高清图像识别分离处理装置12发出信号;ai高清图像识别分离处理装置12在接受信号后启动,然后对待处理垃圾箱6内的垃圾进行分类识别,将垃圾分为湿垃圾、干垃圾、可回收垃圾和有害垃圾,并根据垃圾的种类发出不同的信号;控制器302在接收到ai高清图像识别分离处理装置12发出的信号后,向电机行程控制器304发出对应的信号,电机行程控制器304在接受到信号后启驱动电机2,在驱动安电机2达到工作行程时,此时待处理垃圾箱6处于对应的垃圾桶9的上方,关闭驱动电机2,并向控制器302发出反馈信号,控制器302在接受到反馈信号后控制马达17正转十秒,使两个挡门15打开,在重力的作用下,使待处理箱体6内的物料落至对应的垃圾桶9内,然后停止三十秒后,使垃圾全部落入垃圾桶9内后,控制马达17反转,并向电机行程控制器304发出复位信号,电机行程控制器304在接受到复位信号后启驱动电机2,使的待处理垃圾箱6移动至活动式挡板11的后方即可。
34.需要说明的是,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。在没有更多限制的情况下,由语句“包括一个
……”
限定的要素,并不排除在包括所述要素的过程、方法、物品或者设备中还存在另外的相同要素。
35.本技术文件中使用到的标准零件均可以从市场上购买,而且根据说明书和附图的记载均可以进行订制,各个零件的具体连接方式均采用现有技术中成熟的常规手段,机械、零件和设备均采用现有技术中常规的型号,而且电路连接采用现有技术中常规的连接方式,在此不再作出具体叙述,同时该文中出现的电器元件均与外界的主控制器及市电电连接,说明书中提到的外设控制器可为本文提到的电器元件起到控制作用,而且该外设控制器为常规的已知设备。
36.尽管已经示出和描述了本技术的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本技术的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本技术的范围由所附权利要求及其等同物限定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。