1.本实用新型主要涉及教育科技的技术领域,具体涉及一种多功能智能机器人。
背景技术:
2.教育机器人就是以机器人为载体,来完成相关学科教学的一个系统平台。在工程教育中以教育机器人为实践方法,让学生通过教育机器人这个综合的技术与创新平台,在教师的指导下,主动地去探索、发现、联系相关事物,加工信息,建构知识,使学生由被动接受转变为主动探索,这更有利于培养学生的创新精神,以及发现问题、解决问题的能力。而教育机器人作为建构主义理论在工程教育中最好的实践方法,已经在西方国家成为应用热点。
3.例如申请号为cn201821447617.8的专利申请,包括机器人本体,所述机器人本体内壁一侧的顶部与底部通过轴承分别转动连接有第一转杆和第二转杆,并且第一转杆的外表面固定连接有第一链轮,第二转杆的外表面固定连接有第二链轮,第一链轮的外表面与第二链轮的外表面通过链条传动连接,第一转杆和第二转杆位于机器人本体内部的一端均固定连接有转动块,转动块一侧的底部固定连接有推头。虽然可以对进行更换,但是该机器人功能单一,无法满足多种多样的用户需求。
技术实现要素:
4.本实用新型主要提供了一种多功能智能机器人,用以解决上述背景技术中提出的技术问题。
5.本实用新型解决上述技术问题采用的技术方案为:
6.一种多功能智能机器人,包括机器人本体,所述机器人本体包括机器人头部、机器人身躯、两个机器人胳膊和机器人底座;所述机器人头部上的两个耳部安装有语音接收器,所述机器人头部上的嘴部安装有语音播放器,所述机器人头部上的两个眼部安装有摄像头,所述机器人头部上的鼻部安装有温湿度传感器;所述机器人身躯内部上端分别设有蓄电池和中央处理器,所述中央处理器下端设有存储槽,所述机器人身躯一侧安装有led触摸显示屏;两个所述机器人胳膊其中一端皆连接有旋转柱,所述旋转柱与机器人身躯转动连接,每个所述机器人胳膊内置有空气净化器;所述机器人底座内部一端设有多个驱动马达,每个所述驱动马达输出端皆贯穿机器人底座底壁且连接有清洁刷,所述机器人底座内部另一端设有吸尘器。
7.优选的,所述摄像头内置有人脸识别模块,所述语音播放器和语音接收器连接有语音转化模块。
8.优选的,所述蓄电池输出端连接有usb充电接口,所述usb充电接口一侧设有开关按钮。
9.优选的,所述中央处理器两侧分别设有步进电机,所述步进电机输出端分别与旋转柱轴心连接。
10.优选的,所述中央处理器连接有内置数据库。
11.优选的,所述吸尘器吸尘端位于机器人底座下端,所述吸尘器一侧设有储杂槽,所述储杂槽内部设有储杂盒。
12.优选的,所述机器人底座下端连接有四个电动滚轮。
13.与现有技术相比,本实用新型的有益效果为:
14.采用摄像头、语音播放器和语音接收器,具有人脸识别功能和语音交互功能功能,增加功能多样性,方便学者使用;采用温湿度传感器和空气净化器,通过温湿度传感器检测空气的温湿度,再通过空气净化器进行改善,为学者提供一个良好的学习环境;采用存储槽,可以用于存放书籍,增加实用性;采用led触摸显示屏和内置数据库,方便学者进行操作,并且在断网情况下,也会回答大部分问题;采用机器人底座,通过清洁刷和吸尘器对周围进行卫生打扫,可以减少学者做家务时间,增加学习时间,并且为学者提供一个良好的学习环境;功能多种多样,可以满足用户的不同需求。
15.以下将结合附图与具体的实施例对本实用新型进行详细的解释说明。
附图说明
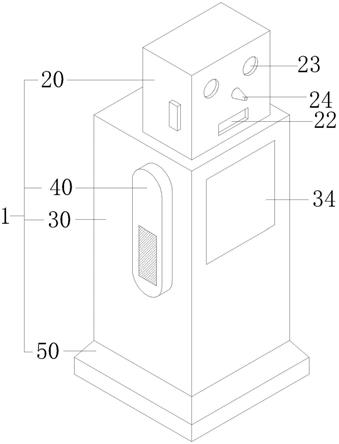
16.图1为本实用新型机器人本体正视立体图;
17.图2为本实用新型机器人本体后视立体图;
18.图3为本实用新型机器人身躯俯视平面图;
19.图4为本实用新型机器人身躯侧视平面图;
20.图5为本实用新型机器人底座侧视平面图。
21.图中:1、机器人本体;20、机器人头部;21、语音接收器;22、语音播放器;23、摄像头;24、温湿度传感器;30、机器人身躯;31、蓄电池;32、中央处理器;33、存储槽;34、led触摸显示屏;35、步进电机;36、开关按钮;37、内置数据库;38、usb充电接口;40、机器人胳膊;41、旋转柱;42、空气净化器;50、机器人底座;51、驱动马达;52、清洁刷;53、吸尘器;54、储杂槽;55、储杂盒;56、电动滚轮。
具体实施方式
22.为了便于理解本实用新型,下面将参照相关附图对本实用新型进行更加全面的描述,附图中给出了本实用新型的若干实施例,但是本实用新型可以通过不同的形式来实现,并不限于文本所描述的实施例,相反的,提供这些实施例是为了使对本实用新型公开的内容更加透彻全面。
23.需要说明的是,当元件被称为“固设于”另一个元件,它可以直接在另一个元件上也可以存在居中的元件,当一个元件被认为是“连接”另一个元件,它可以是直接连接到另一个元件或者可能同时存在居中元件,本文所使用的术语“垂直的”、“水平的”、“左”、“右”以及类似的表述只是为了说明的目的。
24.除非另有定义,本文所使用的所有的技术和科学术语与属于本实用新型的技术领域的技术人员通常连接的含义相同,本文中在本实用新型的说明书中所使用的术语知识为了描述具体的实施例的目的,不是旨在于限制本实用新型,本文所使用的术语“及/或”包括一个或多个相关的所列项目的任意的和所有的组合。
25.请着重参照附图1
‑
4,本实用新型提供一种技术方案:一种多功能智能机器人,包括机器人本体1,所述机器人本体1包括机器人头部20、机器人身躯30、两个机器人胳膊40和机器人底座50,所述机器人身躯30内部上端分别设有蓄电池31和中央处理器32,所述蓄电池31输出端连接有usb充电接口38,方便进行充电,增加功能性,所述usb充电接口38一侧设有开关按钮36,方便进行操作,本装置内部所有电器件皆由中央处理器32进行控制,所述机器人身躯30一侧安装有led触摸显示屏34,led触摸显示屏34为中央处理器32操作面板,通过led触摸显示屏34,方便操作使用。
26.请着重参照附图1和2,所述机器人头部20上的两个耳部安装有语音接收器21,所述机器人头部20上的嘴部安装有语音播放器22,所述语音播放器22和语音接收器21连接有语音转化模块,所述机器人头部20上的两个眼部安装有摄像头23,所述摄像头23内置有人脸识别模块,具有人脸识别功能和语音交互功能功能,增加功能多样性,方便学者使用。
27.请着重参照附图1
‑
4,所述中央处理器32连接有内置数据库37,使得装置即便是在断网的情况下,也可以回复大部分问题,提高实用性,所述中央处理器32下端设有存储槽33,存储槽33可以存放书籍或者杂物,增加实用性,所述中央处理器32两侧分别设有步进电机35,所述步进电机35输出端分别与旋转柱41轴心连接,两个所述机器人胳膊40其中一端皆连接有旋转柱41,所述旋转柱41与机器人身躯30转动连接,启动步进电机35,带动旋转柱41转动,使得机器人胳膊40转动,在必要时,使得机器人胳膊40转动可以增加人机交互性。
28.请着重参照附图1
‑
5,所述机器人头部20上的鼻部安装有温湿度传感器24,每个所述机器人胳膊40内置有空气净化器42,通过温湿度传感器24检测空气的温湿度,再通过空气净化器42进行改善,为学者提供一个良好的学习环境,所述机器人底座50内部一端设有多个驱动马达51,每个所述驱动马达51输出端皆贯穿机器人底座50底壁且连接有清洁刷52,启动驱动马达51,带动清洁刷52转动,使得清洁刷52进行清洁,所述机器人底座50内部另一端设有吸尘器53,所述吸尘器53吸尘端位于机器人底座50下端,所述吸尘器53一侧设有储杂槽54,所述储杂槽54内部设有储杂盒55,启动吸尘器53,吸尘器53可以进行吸尘,并且将吸入的灰尘存放在储杂盒55内部,打开储杂槽54,可以将储杂盒55取出,进行灰尘清洁,通过清洁刷52和吸尘器53对周围进行卫生打扫,可以减少学者做家务时间,增加学习时间,并且为学者提供一个良好的学习环境,所述机器人底座50下端连接有四个电动滚轮56,通过电动滚轮56,可以进行移动,提高实用性。
29.本实用新型的具体操作方式如下:
30.按下开关按钮36即可开机使用,通过usb充电接口38可以进行充电,通过led触摸显示屏34可以进行操作,通过摄像头23、语音播放器22和语音接收器21,使得装置具有人脸识别功能和语音交互功能功能,增加功能多样性,方便学者使用,采用内置数据库37,使得装置即便是在断网的情况下,也可以回复大部分问题,提高实用性,存储槽33可以存放书籍或者杂物,增加实用性,启动步进电机35,带动旋转柱41转动,使得机器人胳膊40转动,在必要时,使得机器人胳膊40转动可以增加人机交互性,通过温湿度传感器24检测空气的温湿度,再通过空气净化器42进行改善,为学者提供一个良好的学习环境,启动吸尘器53,吸尘器53可以进行吸尘,并且将吸入的灰尘存放在储杂盒55内部,打开储杂槽54,可以将储杂盒55取出,进行灰尘清洁,通过清洁刷52和吸尘器53对周围进行卫生打扫,可以减少学者做家务时间,增加学习时间,并且为学者提供一个良好的学习环境,通过电动滚轮56进行移动,
增加实用性,功能多种多样,可以满足用户的不同需求。
31.上述结合附图对本实用新型进行了示例性描述,显然本实用新型具体实现并不受上述方式的限制,只要采用了本实用新型的方法构思和技术方案进行的这种非实质改进,或未经改进将本实用新型的构思和技术方案直接应用于其他场合的,均在本实用新型的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。