1.本实用新型涉及照明技术领域,尤其涉及一种灯条的舵机控制电路及灯条。
背景技术:
2.led灯条的机械动作是靠舵机转动来实现,舵机的控制是专用的控制信号通道,例如dmx512。而led灯条则采用spi控制信号(spi是串行外设接口serial peripheral interface的缩写)进行控制。led灯条的机械动作和灯光控制需要用到两个不同的控制信号,这使得led灯条的控制变得繁琐。
技术实现要素:
3.针对现有技术存在的不足,本实用新型的目的是提供一种灯条的舵机控制电路及灯条,用相同的spi控制信号实现舵机控制,使灯条的控制变得简单。
4.根据本实用新型的第一个方面,提供了灯条的舵机控制电路,包括控制信号转换电路、ad转换电路和舵机驱动电路;
5.控制信号转换电路的输入端用于与spi控制信号接口连接,控制信号转换电路用于将spi控制信号转换为模拟电压信号;
6.ad转换电路的输入端与控制信号转换电路的输出端连接,ad转换电路用于将模拟电压信号转换为第一控制信息;
7.舵机驱动电路连接于ad转换电路与舵机之间,舵机驱动电路根据第一控制信息来控制舵机转动的角度。
8.本实用新型的灯条的舵机控制电路,通过控制信号转换电路将spi控制信号转换为模拟电压信号,再通过ad转换电路进行模数转换产生第一控制信号,并由舵机驱动电路根据第一控制信号来控制舵机转动的角度,即用相同的spi控制信号实现舵机控制,使灯条的控制变得简单。
9.在一些实施方式中,控制信号转换电路包括解码电路与积分电路;
10.解码电路的输入端用于与spi控制信号接口连接,解码电路用于将spi控制信号转换为数字信号;
11.积分电路的输入端与解码电路的输出端连接,积分电路用于将数字信号转化为模拟电压信号。因此,解码电路将spi控制信号转换为数字信号,并由积分电路将数字信号转换为模拟电压信号,实现了由spi控制信号到模拟电压信号的转换。
12.在一些实施方式中,解码电路包括第一解码芯片;
13.第一解码芯片的sdi端与spi控制信号接口连接;
14.第一解码芯片的out端与积分电路连接,第一解码芯片的out端通过第一电阻与vcc端连接;
15.第一解码芯片的vdh端通过第二电阻与vcc端连接,第一解码芯片的vdh端通过第一电容接地,第一解码芯片的gnd端接地。由此,第一解码芯片安装上述连接方式构成了解
码电路,将spi控制信号解码成数字信号。
16.在一些实施方式中,积分电路包括第一运算放大器与第二运算放大器;
17.第一运算放大器的反相输入端通过第三电阻与解码电路的输出端连接,第一运算放大器的反相输入端、输出端通过第二电容连接,第一运算放大器的同相输入端通过第四电阻接地,第一运算放大器的正极接正5v电压,第一运算放大器的负极接地;
18.第二运算放大器的反相输入端通过第五电阻与第一运算放大器的输出端连接,第二运算放大器的反相输入端、输出端通过第三电容连接,第二运算放大器的同相输入端通过第六电阻接地,第二运算放大器的正极接正5v电压,第二运算放大器的负极接地。由此,第一运算放大器与第二运算放大器按照上述连接方式构成了积分电路,将数字信号转换为模拟电压信号。
19.在一些实施方式中,ad转换电路包括ad转换芯片;
20.ad转换芯片的输入端与控制信号转换电路的输出端连接,ad转换芯片的输出端与舵机驱动电路的输入端连接;
21.ad转换芯片的vcc端接正5v电压,ad转换芯片的gnd端接地。由此,ad转换芯片按照上述连接方式构成了ad转换电路,将模拟电压信号转换为第一控制信号。
22.在一些实施方式中,舵机驱动电路包括驱动芯片;
23.驱动芯片的输入端与ad转换电路的输出端连接,驱动芯片的输出端与舵机的控制端连接;
24.驱动芯片的com端接正5v电压,驱动芯片的gnd端接地。由此,驱动芯片按照上述连接方式构成了舵机驱动电路,根据第一控制信息来控制舵机转动的角度。
25.在一些实施方式中,还包括灯条驱动电路,灯条驱动电路连接于spi控制信号接口与灯条之间,灯条驱动电路根据spi控制信号接口的spi控制信号进行灯条的亮灭。由此,灯条的驱动由与spi控制信号接口连接的灯条驱动电路完成,该灯条驱动电路与解码电路连接同一个spi控制信号接口。
26.在一些实施方式中,灯条驱动电路包括第一输入端和第二输入端,控制信号转换电路还包括第一数据转发端;
27.第一输入端与数据转发端连接,第二输入端与spi控制信号接口连接。由此,灯条驱动电路与控制信号转换电路按照上述的连接方式来实现舵机和灯条共用同一个spi控制信号进行控制。
28.在一些实施方式中,灯条驱动电路至少包括一个第二解码芯片;
29.若第二解码芯片为一个时,第二解码芯片的sdi端与数据转发端连接,第二解码芯片的sdi2端与spi控制信号接口连接,第二解码芯片的out端通过第七电阻与灯条的led灯的负极连接,第二解码芯片的vdh端通过第八电阻与vcc端连接,第二解码芯片的vdh端通过第四电容接地,所述第二解码芯片的gnd端接地;
30.若第二解码芯片多于一个时,第一个第二解码芯片的sdi端与数据转发端连接,第一个第二解码芯片的sdi2端与spi控制信号接口连接,后一个第二解码芯片的sdi端与前一个第二解码芯片的sdo端连接,后一个第二解码芯片的sdi2端与前一个第二解码芯片的sdi端连接,每个第二解码芯片的out端通过不同的第七电阻与灯条的led灯的负极连接,每个第二解码芯片的vdh端通过不同的第八电阻与vcc端连接,每个第二解码芯片的vdh端通过
不同的第四电容接地,每个第二解码芯片的gnd端接地。由此,第二解码芯片按照上述连接方式构成灯条驱动电路,用于驱动灯条,其中,第二解码芯片的数量由灯条的led灯的数量决定。
31.根据本实用新型的第二个方面,提供一种灯条,该灯条包括上述的灯条的舵机控制电路。
32.与现有技术相比,本实用新型的灯条的舵机控制电路及灯条,通过控制信号转换电路和ad转换电路实现了用相同的spi控制信号控制舵机,使灯条的控制变得简单。
附图说明
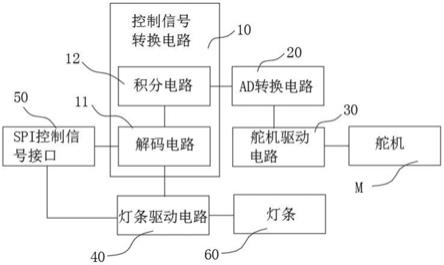
33.图1为本实用新型一实施方式的灯条的舵机控制电路的模块组成示意图;
34.图2为本实用新型一实施方式的灯条的舵机控制电路的控制信号转换电路的电路原理图;
35.图3为本实用新型一实施方式的灯条的舵机控制电路的ad转换电路和舵机驱动电路的电路原理图;
36.图4为本实用新型一实施方式的灯条的舵机控制电路的灯条驱动电路的电路原理图。
37.附图标号说明:控制信号转换电路10,解码电路11,积分电路12,ad转换电路20,舵机驱动电路30,灯条驱动电路40,spi控制信号接口50,灯条60。
具体实施方式
38.下面结合附图对本实用新型作进一步详细的说明。
39.图1
‑
4示意性地显示了根据本实用新型的一种实施方式的灯条的舵机控制电路。如图1所示,该电路包括控制信号转换电路10、ad转换电路20、舵机驱动电路30和灯条驱动电路40;
40.控制信号转换电路10的输入端用于与spi控制信号接口50连接,spi控制信号接口50用于与灯饰信号控制器连接,控制信号转换电路10用于将spi控制信号转换为模拟电压信号;
41.ad转换电路20的输入端与控制信号转换电路20的输出端连接,ad转换电路20用于将模拟电压信号转换为第一控制信息;
42.舵机驱动电路30连接于ad转换电路20与舵机m之间,舵机驱动电路30根据第一控制信息来控制舵机m转动的角度;
43.灯条驱动电路40连接于spi控制信号接口50与灯条60之间,灯条驱动电路40根据spi控制信号接口50的spi控制信号进行灯条60的亮灭。
44.本实用新型的灯条的舵机控制电路,通过控制信号转换电路10将spi控制信号转换为模拟电压信号,再通过ad转换电路20进行模数转换产生第一控制信号,并由舵机驱动电路30根据第一控制信号来控制舵机m转动的角度,而灯条60则由与同一spi控制信号接口50相连的灯条驱动电路40进行控制,即用相同的spi控制信号实现舵机m和灯条60的控制,使灯条的控制变得简单。
45.如图2所示,控制信号转换电路10包括解码电路11与积分电路12;
46.解码电路11的输入端用于与spi控制信号接口50连接,解码电路11用于将spi控制信号转换为数字信号;
47.积分电路12的输入端与解码电路11的输出端连接,积分电路12用于将数字信号转化为模拟电压信号。因此,解码电路11将spi控制信号转换为数字信号,并由积分电路12将数字信号转换为模拟电压信号,实现了由spi控制信号到模拟电压信号的转换。
48.解码电路11包括第一解码芯片u1,第一解码芯片u1的型号为gs8206,当然对于第一解码芯片u1而言,上述型号只是用于举例说明,其还可以是具有相同功能的其它型号芯片;
49.第一解码芯片u1的sdi端与spi控制信号接口50的输入端j1连接;
50.第一解码芯片u1的outr端(当然也可以是outg端或outb端)通过第一电阻r1与vcc端连接;
51.第一解码芯片u1的vdh端通过第二电阻r2与vcc端连接,第一解码芯片u1的vdh端通过第一电容c1接地,第一解码芯片u1的gnd端接地。由此,第一解码芯片u1安装上述连接方式构成了解码电路,将spi控制信号解码成数字信号(即pwm电压信号)。其中第一电阻r1为上拉电阻,用于帮助第一解码芯片u1的outr引脚产生亮度控制的pwm电压信号。
52.积分电路12包括第一运算放大器u6a与第二运算放大器u6b;
53.第一运算放大器u6a的反相输入端通过第三电阻r3与解码电路的第一解码芯片u1的outr端(与第一电阻r1的连接端相同)连接,第一运算放大器u6a的反相输入端、输出端通过第二电容c2连接,第一运算放大器u6a的同相输入端通过第四电阻r4接地,第一运算放大器u6a的正极接正5v电压,第一运算放大器u6a的负极接地;
54.第二运算放大器u6b的反相输入端通过第五电阻r5与第一运算放大器u6a的输出端连接,第二运算放大器u6b的反相输入端、输出端通过第三电容c3连接,第二运算放大器u6b的同相输入端通过第六电阻r6接地,第二运算放大器u6b的正极接正5v电压,第二运算放大器u6b的负极接地。由此,第一运算放大器u6a与第二运算放大器u6b按照上述连接方式构成了积分电路,将数字信号转换为模拟电压信号。
55.如图3所示,ad转换电路20包括ad转换芯片u2,ad转换芯片u2d的型号为stc8g1k08a,当然对于ad转换芯片u2而言,上述型号只是用于举例说明,其还可以是具有相同功能的其它型号芯片;
56.ad转换芯片u2的输入端(p5.4端)与第二运算放大器u6b的输出端连接;
57.ad转换芯片u2的vcc端接正5v电压,ad转换芯片u2的gnd端接地。由此,ad转换芯片u2按照上述连接方式构成了ad转换电路,将模拟电压信号转换为第一控制信号。
58.舵机驱动电路30包括驱动芯片u3,驱动芯片u3的型号为uln2003,当然对于驱动芯片u3而言,上述型号只是用于举例说明,其还可以是具有相同功能的其它型号芯片;
59.驱动芯片u3的输入端(in1端)与ad转换芯片u2的输出端(p3.2端)连接,驱动芯片u3的输出端(ot1端)与舵机m的控制端s连接,舵机m的vcc端接正5v电压,舵机m的gnd端接地;
60.驱动芯片u3的com端接正5v电压,驱动芯片u3的gnd端接地。由此,驱动芯片u3按照上述连接方式构成了舵机m的驱动电路,根据第一控制信息来控制舵机m转动的角度。
61.在灯条60输入端增加一个spi解码芯片(即第一解码芯片u1),利用gs8206的红色
通道的pwm信号,通过积分电路12转为0
‑
5v的模拟电压信号,再通过ad转换芯片u2的ad模数转换处理,产生对应的舵机m的控制信号,控制舵机m的转动角度。舵机m选择以mg995为例,选择180度的型号,控制舵机m一般需要一个20ms左右的时基脉冲,该脉冲的高电平部分一般为0.5ms
‑
2.5ms范围内的角度控制脉冲部分,总间隔为2ms。以180度角度伺服为例,对应的控制关系为:模拟电压0v时,信号时间0.5ms时,舵机m转动角度为0度;模拟电压0v时,信号时间1ms时,舵机m转动角度为45度;模拟电压2.5v时,信号时间1.5ms时,舵机m转动角度为90度;模拟电压2.5v时,信号时间2ms时,舵机m转动角度为135度;模拟电压5v时,信号时间2.5ms时,舵机m转动角度为180度。
62.如图4所示,灯条驱动电路40至少包括一个第二解码芯片u4,本实施方式以三个第二解码芯片u4为例进行说明,第二解码芯片u4的型号为gs8206,当然对于第二解码芯片u4而言,上述型号只是用于举例说明,其还可以是具有相同功能的其它型号芯片,gs8206是spi解码芯片,把控制器信号解析为红色绿色蓝色通道的pwm信号,从而控制对应的灯条60上的led,gs8206是级联的,spi信号先进先出原则;
63.第一个第二解码芯片u4的sdi端(第一输入端)与第一解码芯片的sdo端(数据转发端)连接,第一个第二解码芯片的sdi2端(第二输入端)与spi控制信号接口50的输入端j1连接,第二个第二解码芯片u4的sdi端与第一个第二解码芯片u4的sdo端连接,第二个第二解码芯片u4的sdi2端与第一个第二解码芯片u4的sdi端连接,第三个第二解码芯片u4的sdi端与第二个第二解码芯片u4的sdo端连接,第三个第二解码芯片u4的sdi2端与第二个第二解码芯片u4的sdi端连接,每个第二解码芯片u4的outr端通过不同的第七电阻r7与灯条60的rled灯的负极连接,每个第二解码芯片u4的outg端通过不同的第七电阻r7与灯条60的gled灯的负极连接,每个第二解码芯片u4的outb端通过不同的第七电阻r7与灯条60的bled灯的负极连接,每个第二解码芯片u4的vdh端通过不同的第八电阻r8与vcc端连接,每个第二解码芯片u4的vdh端通过不同的第四电容c4接地,每个第二解码芯片u4的gnd端接地,第三个第二解码芯片u4的sdo端与spi控制信号接口50的输出端j2连接,spi控制信号接口50的输入端j1与输出端j2的电源端接vcc端,接地端接地。由此,第二解码芯片u4按照上述连接方式构成灯条驱动电路40,用于驱动灯条60,其中,第二解码芯片u4的数量由灯条60的led灯的数量决定。
64.当第二解码芯片u4为一个时,第二解码芯片u4的sdi端与第一解码芯片u1的sdo端连接,第二解码芯片的sdi2端与spi控制信号接口50的输入端j1连接,第二解码芯片u4的outr端通过不同的第七电阻r7与灯条60的rled灯的负极连接,第二解码芯片u4的outg端通过不同的第七电阻r7与灯条60的gled灯的负极连接,第二解码芯片u4的outb端通过不同的第七电阻r7与灯条60的bled灯的负极连接,第二解码芯片u4的vdh端通过第八电阻r8与vcc端连接,第二解码芯片u4的vdh端通过第四电容c4接地,所述第二解码芯片u4的gnd端接地;第二解码芯片u4的sdo端与spi控制信号接口50的输出端j2连接。
65.根据本实用新型的第二个方面,提供一种灯条,该灯条包括上述的灯条的舵机控制电路。通过控制信号转换电路和ad转换电路实现了用相同的spi控制信号控制舵机,使灯条的控制变得简单。
66.以上所述的仅是本实用新型的一些实施方式。对于本领域的普通技术人员来说,在不脱离本实用新型创造构思的前提下,还可以做出若干变形和改进,这些都属于本实用
新型的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。