1.本实用新型属于机械手领域,特别是涉及一种升降式抓取机械手结构。
背景技术:
2.在自动设备开发过程中需要用到机械手,但是现有的机械手通常只能实现抓取动作,对于一些特殊的使用场合,需要实现升降和抓取动作,就需要用到相应的升降式抓取机械手。
技术实现要素:
3.为解决以上技术问题,本实用新型提供升降式抓取机械手结构,此机械手结构能够实现升降动作,而且能够实现抓取动作,进而满足实际的使用需要。
4.为了实现上述的技术特征,本实用新型的目的是这样实现的:升降式抓取机械手结构,它包括矩形框架体,所述矩形框架体的侧壁上通过导轨安装座固定安装有竖直导轨,所述竖直导轨之间滑动配合安装有升降板,所述升降板的顶部固定安装有螺母套安装座,所述螺母套安装座与用于驱动其升降的升降动力机构相配合,所述升降板的底部侧壁上通过连接板结构安装有用于抓取的机械手机构。
5.所述矩形框架体包括竖直杆,所述竖直杆的两端通过水平杆固定相连,所述竖直杆和水平杆采用型钢材料裁剪而成。
6.所述升降动力机构包括固定在螺母套安装座内部的螺母套,所述螺母套与升降螺杆构成螺纹传动配合,所述升降螺杆的两端分别通过轴承座支撑在矩形框架体之间,所述升降螺杆的顶部通过联轴器与电机的输出轴相连,所述电机固定在矩形框架体的顶部。
7.所述连接板结构包括竖直板,所述竖直板的底端侧壁上固定有水平板,所述水平板的底端固定有机械手安装立板,所述机械手安装立板的另一端安装机械手机构。
8.所述机械手机构包括机械手主板,所述机械手主板上对称铰接有齿轮盘,所述齿轮盘上加工有用于啮合的半齿轮,所述齿轮盘的外缘固定有转动杆,所述转动杆的另一端与夹指的尾端铰接相连,所述夹指的中间位置通过第一销轴铰接有连杆,所述连杆的另一端通过第二销轴与机械手主板铰接相连,其中一个所述齿轮盘的主轴与用于驱动其转动的夹紧电机相连。
9.所述连杆和转动杆相平行布置。
10.本实用新型有如下有益效果:
11.1、此机械手结构能够实现升降动作,而且能够实现抓取动作,进而满足实际的使用需要。在工作过程中,通过升降动力机构能够驱动螺母套安装座实现升降,进而带动底部的机械手机构升到指定的高度,以满足使用的需要,待其升到指定高度之后,通过机械手机构实现抓取动作。
12.2、通过上述矩形框架体保证了整个机械手结构的结构强度,而且简化了其制造工艺,降低了设备成本。
13.3、通过上述的升降动力机构,主要用于提供升降动力。
14.4、通过上述的连接板结构能够用于机械手机构的安装和固定。
15.5、通过上述的机械手机构主要用于实现物体的抓取。
附图说明
16.下面结合附图和实施例对本实用新型作进一步说明。
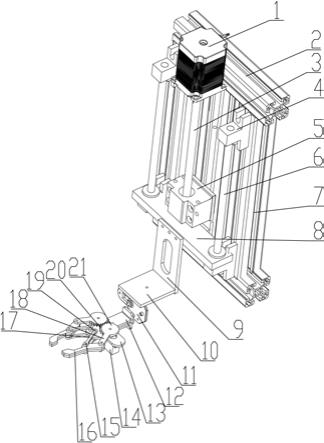
17.图1为本实用新型第一视角三维图。
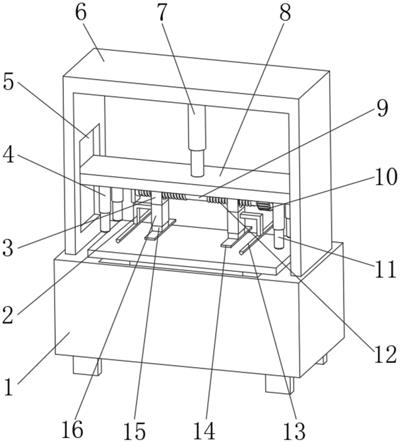
18.图2为本实用新型第二视角三维图。
19.图中:电机1、水平杆2、升降螺杆3、导轨安装座4、螺母套安装座5、竖直导轨6、竖直杆7、升降板8、竖直板9、水平板10、机械手安装立板11、机械手主板12、电机安装板13、夹紧电机14、第一销轴15、夹指16、连杆17、转动杆18、第二销轴19、半齿轮20、齿轮盘21。
具体实施方式
20.下面结合附图对本实用新型的实施方式做进一步的说明。
21.参见图1
‑
2,升降式抓取机械手结构,它包括矩形框架体,所述矩形框架体的侧壁上通过导轨安装座4固定安装有竖直导轨6,所述竖直导轨6之间滑动配合安装有升降板8,所述升降板8的顶部固定安装有螺母套安装座5,所述螺母套安装座5与用于驱动其升降的升降动力机构相配合,所述升降板8的底部侧壁上通过连接板结构安装有用于抓取的机械手机构。此机械手结构能够实现升降动作,而且能够实现抓取动作,进而满足实际的使用需要。在工作过程中,通过升降动力机构能够驱动螺母套安装座5实现升降,进而带动底部的机械手机构升到指定的高度,以满足使用的需要,待其升到指定高度之后,通过机械手机构实现抓取动作。
22.进一步的,所述矩形框架体包括竖直杆7,所述竖直杆7的两端通过水平杆2固定相连,所述竖直杆7和水平杆2采用型钢材料裁剪而成。通过上述矩形框架体保证了整个机械手结构的结构强度,而且简化了其制造工艺,降低了设备成本。
23.进一步的,所述升降动力机构包括固定在螺母套安装座5内部的螺母套,所述螺母套与升降螺杆3构成螺纹传动配合,所述升降螺杆3的两端分别通过轴承座支撑在矩形框架体之间,所述升降螺杆3的顶部通过联轴器与电机1的输出轴相连,所述电机1固定在矩形框架体的顶部。通过上述的升降动力机构,主要用于提供升降动力。在工作过程中,通过电机1驱动升降螺杆3进而通过升降螺杆3与螺母套构成螺纹传动配合,最终实现螺母套安装座5的升降动作。
24.进一步的,所述连接板结构包括竖直板9,所述竖直板9的底端侧壁上固定有水平板10,所述水平板10的底端固定有机械手安装立板11,所述机械手安装立板11的另一端安装机械手机构。通过上述的连接板结构能够用于机械手机构的安装和固定。
25.进一步的,所述机械手机构包括机械手主板12,所述机械手主板12上对称铰接有齿轮盘21,所述齿轮盘21上加工有用于啮合的半齿轮20,所述齿轮盘21的外缘固定有转动杆18,所述转动杆18的另一端与夹指16的尾端铰接相连,所述夹指16的中间位置通过第一销轴15铰接有连杆17,所述连杆17的另一端通过第二销轴19与机械手主板12铰接相连,其中一个所述齿轮盘21的主轴与用于驱动其转动的夹紧电机14相连。通过上述的机械手机构
主要用于实现物体的抓取。工作过程中,通过夹紧电机14驱动齿轮盘21,通过齿轮盘21上的半齿轮20相啮合,进而带动整个齿轮盘21转动,再由齿轮盘21驱动转动杆18转动,进而通过转动杆18驱动夹指16实现夹紧动作。
26.进一步的,所述连杆17和转动杆18相平行布置。
27.本实用新型的使用过程如下:
28.当需要实现升降动作时,启动升降动力机构,通过电机1驱动升降螺杆3进而通过升降螺杆3与螺母套构成螺纹传动配合,进而实现螺母套安装座5的升降动作,进而带动底部的机械手机构升到指定的高度,以满足使用的需要,待其升到指定高度之后,通过夹紧电机14驱动齿轮盘21,通过齿轮盘21上的半齿轮20相啮合,进而带动整个齿轮盘21转动,再由齿轮盘21驱动转动杆18转动,进而通过转动杆18驱动夹指16实现夹紧动作。
技术特征:
1.升降式抓取机械手结构,其特征在于:它包括矩形框架体,所述矩形框架体的侧壁上通过导轨安装座(4)固定安装有竖直导轨(6),所述竖直导轨(6)之间滑动配合安装有升降板(8),所述升降板(8)的顶部固定安装有螺母套安装座(5),所述螺母套安装座(5)与用于驱动其升降的升降动力机构相配合,所述升降板(8)的底部侧壁上通过连接板结构安装有用于抓取的机械手机构。2.根据权利要求1所述升降式抓取机械手结构,其特征在于:所述矩形框架体包括竖直杆(7),所述竖直杆(7)的两端通过水平杆(2)固定相连,所述竖直杆(7)和水平杆(2)采用型钢材料裁剪而成。3.根据权利要求1所述升降式抓取机械手结构,其特征在于:所述升降动力机构包括固定在螺母套安装座(5)内部的螺母套,所述螺母套与升降螺杆(3)构成螺纹传动配合,所述升降螺杆(3)的两端分别通过轴承座支撑在矩形框架体之间,所述升降螺杆(3)的顶部通过联轴器与电机(1)的输出轴相连,所述电机(1)固定在矩形框架体的顶部。4.根据权利要求1所述升降式抓取机械手结构,其特征在于:所述连接板结构包括竖直板(9),所述竖直板(9)的底端侧壁上固定有水平板(10),所述水平板(10)的底端固定有机械手安装立板(11),所述机械手安装立板(11)的另一端安装机械手机构。5.根据权利要求1或4所述升降式抓取机械手结构,其特征在于:所述机械手机构包括机械手主板(12),所述机械手主板(12)上对称铰接有齿轮盘(21),所述齿轮盘(21)上加工有用于啮合的半齿轮(20),所述齿轮盘(21)的外缘固定有转动杆(18),所述转动杆(18)的另一端与夹指(16)的尾端铰接相连,所述夹指(16)的中间位置通过第一销轴(15)铰接有连杆(17),所述连杆(17)的另一端通过第二销轴(19)与机械手主板(12)铰接相连,其中一个所述齿轮盘(21)的主轴与用于驱动其转动的夹紧电机(14)相连。6.根据权利要求5所述升降式抓取机械手结构,其特征在于:所述连杆(17)和转动杆(18)相平行布置。
技术总结
本实用新型提供了升降式抓取机械手结构,它包括矩形框架体,所述矩形框架体的侧壁上通过导轨安装座固定安装有竖直导轨,所述竖直导轨之间滑动配合安装有升降板,所述升降板的顶部固定安装有螺母套安装座,所述螺母套安装座与用于驱动其升降的升降动力机构相配合,所述升降板的底部侧壁上通过连接板结构安装有用于抓取的机械手机构。此机械手结构能够实现升降动作,而且能够实现抓取动作,进而满足实际的使用需要。的使用需要。的使用需要。
技术研发人员:黄巍 曾光 汪静 黄中玉 代中华
受保护的技术使用者:湖北三峡职业技术学院
技术研发日:2021.06.21
技术公布日:2021/12/7
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。