1.本实用新型涉及一种机器人工作单元的快速更换装置。
背景技术:
2.越来越多的工厂中已经使用机器人进行生产作业,例如机器人可以进行超声波冲孔和超声波焊接等工作。机器人造价高,占地面积大,工厂中一般配置的机器人数量不需要特别多,而是尽可能的提高机器人的利用率。故在生产作业中,经常需要给机器人更换不同的工作单元,使其能够完成不同的工作。如给机器人安装上超声波冲孔头工作单元,其就能够进行冲孔作业,而给机器人安装上超声波焊接头,其就能够进行焊接作业;不同的焊接要求也需要更换不同的焊接头。如何使机器人能够快速的更换相应的工作单元,对生产效率有着一定的影响。
3.中国专利202022013762.9公开了一种便于更换维护夹头的焊接工业机器人,其通过使用者旋转螺栓脱离螺纹槽,螺栓脱离螺纹槽的同时弹簧复位做功推动滑块向左移动,以此来实现夹头的更换。但是这种更换结构还需要工人通过旋转螺栓的方式来更换夹头,不同工人的工作效率不同,工作效率得不到确切的保证,且螺栓与螺纹槽的配合,使用时间和使用频率对其影响比较大,使用寿命也得不到有效的保证。故需要研发一种结构更为合理,操作更为方便快捷的机器人工作单元的更换装置。
技术实现要素:
4.本实用新型要解决的技术问题是:提供一种机器人工作单元的快速更换装置,该装置采用气缸提供锁紧动力,结构合理,操作简单快捷,能够提升生产效率,且主要动作部件不易磨损,使用寿命长。
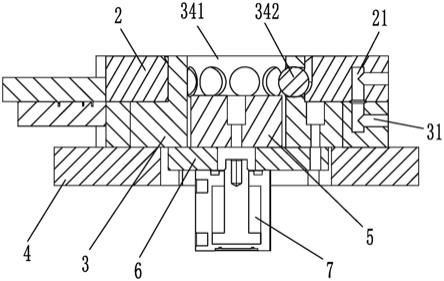
5.解决上述技术问题的技术方案是:一种机器人工作单元的快速更换装置,包括气缸、固定在工作单元上的连接块一以及固定在机器人上的连接块二,所述气缸的缸筒端通过连接板安装在连接块二上,所述连接块二中部设置有锁紧轴承组件,该锁紧轴承组件包括圆环体和多个锁紧球,所述圆环体上均布开有多个安装孔,锁紧球放置在安装孔内,锁紧球的直径比安装孔的直径大,所述圆环体内设置有压块,压块与气缸的活塞端连接,圆环体外的连接块上还设置有至少两个定位销,所述连接块一中部开有套装孔,该套装孔的边缘设置有多个与锁紧球配合的锁紧槽,套装孔外的连接块一上开有与定位销配合的定位孔;
6.锁紧状态时,连接块一的套装孔套装在连接块二的圆环体外侧,定位销插入定位孔内,气缸处于伸长状态,压块顶出锁紧球压紧锁紧槽;
7.放松状态时,气缸处于收缩状态,压块压紧锁紧球的边缘,锁紧球与套装孔之间有间隙。
8.所述连接块一上开有三组气路快接口一,所述气路快接口一的两端口分别位于连接块一的侧面和正端面上,所述连接块二上开有三组气路快接口二,所述气路快接口二的两端口分别位于连接块二的侧面和正端面上,锁紧状态时,连接块一正端面上的气路快接
口一的端口与连接块二正端面上的气路快接口二的端口对齐连通。
9.所述气路快接口一或气路快接口二内安装有密封圈。
10.所述安装孔是内大外小的锥形孔,锁紧状态时锁紧球凸出圆环体外侧4
‑
6mm。
11.所述套装孔的内径比圆环体外径大0.5
‑
1mm。
12.由于采用上述技术方案,本实用新型具有以下有益效果:
13.1、本实用新型采用气缸提供锁紧动力,通过气缸伸长带动压块压紧锁紧球,以实现对更换装置两个连接块的快速固定,当需要更换工作单元时,只需要控制气缸收缩回位,就可以放松锁紧球,实现工作单元的快速更换。本实用新型只需要控制气缸,就可以实现夹紧和松开两个连接块,结构合理,操作简单快捷,新手也能快速的上手操作,能够提升生产效率。
14.2、本实用新型主要动作的部件是气缸、压块和锁紧球,这些部件不易磨损,使用寿命长,维护保养容易。
15.3、本实用新型的连接块上还设置有气路快接口和电路快接口,更换工作单元后,相应的气路模块和电路模块也能够快速连接。
16.4、采用本实用新型能够实现多种型号的超声波焊接枪头和多种型号的超声波冲孔单元的更换,提升柔性化程度;可以仅采用一个机器人同时完成多个不同产品的冲孔和焊接工作。
17.下面,结合附图和实施例对本实用新型之一种机器人工作单元的快速更换装置的技术特征作进一步的说明。
附图说明
18.图1:本实用新型之一种机器人工作单元的快速更换装置使用状态图。
19.图2:本实用新型之固定在工作单元上的连接块一结构示意图。
20.图3:本实用新型之固定在机器人上的连接块二结构示意图。
21.图4:本实用新型之连接块一立体图。
22.图5:本实用新型之连接块二立体图之一。
23.图6:本实用新型之连接块二立体图之二。
24.图7:本实用新型之连接块二与安装板二连接示意图。
25.图8:本实用新型之一种机器人工作单元的快速更换装置结构示意图(包括有安装板二)。
26.图9:图7的a
‑
a剖视图(放大)。
27.图中:p1表示工作单元支架,p2表示超声波冲孔单元,p3表示超声波焊接枪头,p4表示机器人,p5表示本实用新型之一种机器人工作单元的快速更换装置。
具体实施方式
28.实施例:一种机器人工作单元的快速更换装置,如图2
‑
图9所示,包括气缸7、固定在工作单元上的连接块一2以及固定在机器人上的连接块二3,所述气缸7的缸筒端通过连接板6安装在连接块二3上,所述连接块二中部设置有锁紧轴承组件34,该锁紧轴承组件包括圆环体341和多个锁紧球342,所述圆环体上均布开有多个安装孔,锁紧球342放置在安装
孔内,锁紧球的直径比安装孔的直径大,以确保锁紧球不能穿过安装孔,所述圆环体341内设置有压块5,压块与气缸7的活塞端连接,圆环体341外的连接块上还设置有至少两个定位销32,所述连接块一2中部开有内径比圆环体341外径大的套装孔22,该套装孔22的边缘设置有多个与锁紧球配合的锁紧槽23,套装孔外的连接块一2上开有与定位销配合的定位孔24。
29.锁紧状态时,连接块一的套装孔22套装在连接块二的圆环体341外侧,定位销32插入定位孔24内,气缸处于伸长状态,压块5向连接块一的方向移动,压块顶出锁紧球342压紧连接块一套装孔的锁紧槽23。
30.放松状态时,气缸7处于收缩状态,压块压紧锁紧球的边缘(如图9所示),一方面使锁紧球与套装孔之间有间隙,方便更换工作单元,一方面能确保锁紧球342不会掉出圆环体上的安装孔外。
31.本实施例中,所述连接块一上开有三组气路快接口一21,所述气路快接口一的两端口分别位于连接块一的侧面和正端面(即与连接块二接触的端面)上,所述连接块二上开有三组气路快接口二31,所述气路快接口二的两端口分别位于连接块二的侧面和正端面(即与连接块一接触的端面)上,锁紧状态时,连接块一正端面上的气路快接口一的端口与连接块二正端面上的气路快接口二的端口对齐连通(如图9所示)。所述气路快接口一或气路快接口二内安装有橡胶密封圈,以保证气密性。
32.本实施例中,所述安装孔是内大外小的锥形孔,锁紧状态时锁紧球凸出圆环体外侧4
‑
6mm。所述套装孔的内径比圆环体外径大0.5
‑
1mm。
33.本实施例中,所述连接块二上还设置有电路快插母接头33,连接块一上设置有配对的电路快插公接头25,这样设置能方便电路的连接。
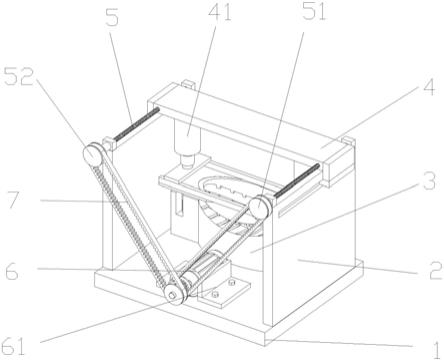
34.本实施例中,为了便于连接工作单元,所述连接块一2的后端面固定在安装板一1上,为了便于与机器人连接,所述连接块二3的后端面固定在安装板二4上,安装板二4中部开有通孔,连接板6位于该通孔内。
35.如图1所示,使用时,分别将超声波冲孔单元和多个不同类型的超声波焊接枪头安装端固定在安装板一1上,连接块二通过安装板二4固定在机器人的5轴放置盘上。安装板二4上还设置有线路支架8,可将线路穿过支架固定。选择需要使用的其中一个工作单元(例如超声波焊接枪头),将其固定连接的连接块一的套装孔22套装在连接块二的圆环体341外侧,定位销32插入定位孔24内,控制气缸伸长,压块5被推动往锁紧球的方向移动,从而顶出锁紧球342压紧连接块一套装孔的锁紧槽23,实现锁紧。当需要更换工作单元时,控制气缸回收到原始的收缩状态,压块仅压紧锁紧球的边缘,此时锁紧球未压紧连接块一的套装孔,连接一与连接二处于放松的状态,可以取下工作单元,再将另外一个工作单元装上即可。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。