1.本实用新型属于机械臂技术领域,具体涉及一种工业机器人的机器人手臂。
背景技术:
2.机械臂是指高精度,多输入多输出、高度非线性、强耦合的复杂系统。因其独特的操作灵活性,已在工业装配,安全防爆等领域得到广泛应用。常规机械臂的驱动大多采用电机直接驱动,但是随着加工精度的提高,需要对机械臂进行精细驱动。
技术实现要素:
3.为解决现有技术的不足,本实用新型提供了一种工业机器人的机器人手臂。
4.本实用新型所提供的技术方案如下:
5.一种工业机器人的机器人手臂,包括:
6.空心的底座;
7.水平的滑动设置在所述底座上的手臂机构;
8.以及设置在所述底座中的变速驱动机构,其传动连接所述手臂机构,用于带动所述手臂机构以不同的水平移动速度进行往复直线移动。
9.基于上述技术方案,可以实现在相同的驱动机构的带动下,调节连接块的移动速度,实现慢速和快速的改变,提高驱动的精度。
10.具体的:
11.所述手臂机构固定连接有第二离合件,所述第二离合件与所述底座水平的滑动连接;
12.所述变速驱动机构包括:
13.水平的设置在所述底座内的若干螺纹密度各不相同的传动螺纹杆,各所述传动螺纹杆螺纹连接有与所述第二离合件对应的第一离合件;
14.调节机构,用于调节各所述传动螺纹杆的位置至各所述第一离合件与所述第二离合件连接或分离;
15.以及水平的设置在所述底座内的转动驱动机构,用于带动所述第一离合与所述第二离合件连接的传动螺纹杆转动。
16.基于上述技术方案,通过调节机构可调节具有不同螺纹密度的传动螺纹杆与手臂机构进行接合,然后在转动驱动机构的驱动下,实现手臂机构不同的移动速度。
17.具体的:
18.所述调节机构包括:
19.相对的竖向设置的一对转盘,各所述传动螺纹杆水平设置,且绕周向均匀的设置在两块所述转盘之间,各所述传动螺纹杆的两端分别与对应的所述转盘转动连接;
20.贯穿两个所述转盘设置的转动轴,其一端转动连接所述底座的一个侧壁;
21.以及水平固定设置在所述底座的一个侧壁上的调节电机,其输出轴同轴的固定连
接所述转动轴的另一端。
22.基于上述技术方案,基于上述技术方案,在调节电机的转动下,可以将不同的传动螺纹杆调整至接合处,进而在转动驱动机构的驱动下,实现手臂机构不同的移动速度。
23.具体的:
24.所述传动螺纹杆的两端分别通过轴承与对应的所述转盘转动连接,各所述传动螺纹杆的同一端伸出所述转盘,并设置有限位块,其设置有限位槽;
25.所述转动驱动机构包括:
26.水平设置在所述底座内上部的驱动电机,其输出轴设置有与所述限位槽对应的限位栓;
27.以及水平设置在所述底座内上部的第一伸缩件,其固定端固定在所述底座的内侧壁上,其伸缩端固定连接所述驱动电机的机壳,所述伸缩端伸长,所述限位栓插入到所述限位槽内,所述驱动电机的输出轴与所述传动螺纹杆传动连接,所述伸缩端缩回,所述限位栓与所述限位槽分离。
28.基于上述技术方案,转动驱动机构可与到达接合处的传动螺纹杆进行接合或分离,从而驱动传动螺纹杆转动。在第二离合件和第一离合件接合的情况下,就可以带动手臂机构移动。
29.具体的:
30.所述第二离合件包括第二连接块,其下端固定设置有竖向向下设置的第二伸缩件;
31.在所述底座的上端面上水平设置有导向杆,所述导向杆的两端通过座板固定设置在所述底座的上端面上,所述导向杆滑动连接所述第二连接块;
32.在所述底座的上端面设置有与所述导向杆对应的长条形的滑行开口,所述第二伸缩件向下贯穿所述滑行开口设置;
33.所述第一离合件包括与所述传动螺纹杆螺纹连接的第一连接块,其上端面设置有凹槽;
34.所述第二伸缩件的固定端滑动配合在所述滑行开口内,所述第二伸缩件的伸缩端向下伸长至其插入到转动到位的所述传动螺纹杆的所述第一离合件的所述凹槽内,所述第二伸缩件和所述凹槽接合,所述第二伸缩件的伸缩端向上缩回至其离开对应的所述凹槽,所述第二伸缩件和所述凹槽分离。
35.基于上述技术方案,可以方便的实现第二离合件和第一离合件的接合或分离。
36.具体的,所述手臂机构包括安装座和固定在所述安装座上的连接臂,所述安装座固定连所述第二连接块,所述连接臂用于安装执行机构。
37.基于上述技术方案,可以通过实现第二连接块不同的速度移动,从而让执行机构的移动实现慢速和快速的改变,提高驱动的精度。
38.具体的,各所述传动螺纹杆绕周向以螺纹密度依次增大或缩小的方向设置。
39.基于上述技术方案,可以根据需要,实现从快到慢,或从慢到块的顺次调节。
附图说明
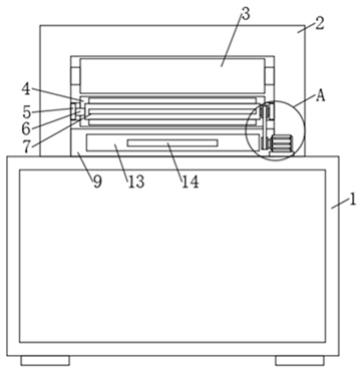
40.图1是本实用新型所提供的工业机器人的机器人手臂的侧视图。
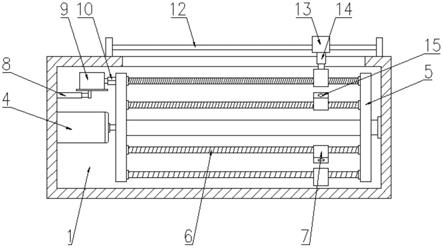
41.图2是本实用新型所提供的工业机器人的机器人手臂的底座部分的结构示意图。
42.图3是本实用新型所提供的工业机器人的机器人手臂的转盘部分的主视图。
43.附图1、2、3中,各标号所代表的结构列表如下:
44.1、底座,2、安装座,3、连接臂,4、调节电机,5、转盘,6、传动螺纹杆,7、第一连接块,8、第一伸缩件,9、驱动电机,10、限位栓,11、限位块,12、导向杆,13、第二连接块,14、第二伸缩件,15、凹槽。
具体实施方式
45.以下对本实用新型的原理和特征进行描述,所举实施例只用于解释本实用新型,并非用于限定本实用新型的范围。
46.需要说明的是,当一个零件或组件被认为是“连接”、“位于”、“装配”在另一个零件或组件上时,它可以是直接设置在另一个零件和组件上或者可能同时存在居中零件和组件。本文所使用的术语“左”、“右”、“上”、“下”以及类似的表述只是为了说明的目的。
47.在一个具体实施方式中,如图1所示,工业机器人的机器人手臂,包括:空心的底座1;水平的滑动设置在所述底座1上的手臂机构;以及设置在所述底座1中的变速驱动机构,其传动连接所述手臂机构,用于带动所述手臂机构以不同的水平移动速度进行往复直线移动。基于此技术方案,可以实现在相同的驱动机构的带动下,调节连接块的移动速度,实现慢速和快速的改变,提高驱动的精度。
48.在一个实施例中,如图2所示,所述手臂机构固定连接有第二离合件,所述第二离合件与所述底座1水平的滑动连接。所述变速驱动机构包括:水平的设置在所述底座1内的若干螺纹密度各不相同的传动螺纹杆6,各所述传动螺纹杆6螺纹连接有与所述第二离合件对应的第一离合件;调节机构,用于调节各所述传动螺纹杆6的位置至各所述第一离合件与所述第二离合件连接或分离;以及水平的设置在所述底座1内的转动驱动机构,用于带动所述第一离合与所述第二离合件连接的传动螺纹杆6转动。基于此技术方案,通过调节机构可调节具有不同螺纹密度的传动螺纹杆6与手臂机构进行接合,然后在转动驱动机构的驱动下,实现手臂机构不同的移动速度。
49.在一个实施例中,如图2所示,所述调节机构包括:相对的竖向设置的一对转盘5,各所述传动螺纹杆6水平设置,且绕周向均匀的设置在两块所述转盘5之间,各所述传动螺纹杆6的两端分别与对应的所述转盘5转动连接;贯穿两个所述转盘5设置的转动轴,其一端转动连接所述底座1的一个侧壁;以及水平固定设置在所述底座1的一个侧壁上的调节电机4,其输出轴同轴的固定连接所述转动轴的另一端。基于此技术方案,基于上述技术方案,在调节电机4的转动下,可以将不同的传动螺纹杆6调整至接合处,进而在转动驱动机构的驱动下,实现手臂机构不同的移动速度。
50.在一个实施例中,如图2、3所示,所述传动螺纹杆6的两端分别通过轴承与对应的所述转盘5转动连接,各所述传动螺纹杆6的同一端伸出所述转盘5,并设置有限位块11,其设置有限位槽。所述转动驱动机构包括:水平设置在所述底座1内上部的驱动电机9,其输出轴设置有与所述限位槽对应的限位栓10;以及水平设置在所述底座1内上部的第一伸缩件8,其固定端固定在所述底座1的内侧壁上,其伸缩端固定连接所述驱动电机9的机壳,所述伸缩端伸长,所述限位栓10插入到所述限位槽内,所述驱动电机9的输出轴与所述传动螺纹
杆6传动连接,所述伸缩端缩回,所述限位栓10与所述限位槽分离。限位栓10具体可为正多边形的柱状结构。基于此技术方案,转动驱动机构可与到达接合处的传动螺纹杆6进行接合或分离,从而驱动传动螺纹杆6转动。在第二离合件和第一离合件接合的情况下,就可以带动手臂机构移动。
51.在一个实施例中,如图2所示,所述第二离合件包括第二连接块13,其下端固定设置有竖向向下设置的第二伸缩件14;在所述底座1的上端面上水平设置有导向杆12,所述导向杆12的两端通过座板固定设置在所述底座1的上端面上,所述导向杆12滑动连接所述第二连接块13;在所述底座1的上端面设置有与所述导向杆12对应的长条形的滑行开口,所述第二伸缩件14向下贯穿所述滑行开口设置;所述第一离合件包括与所述传动螺纹杆6螺纹连接的第一连接块7,其上端面设置有凹槽15。所述第二伸缩件14的固定端滑动配合在所述滑行开口内,所述第二伸缩件14的伸缩端向下伸长至其插入到转动到位的所述传动螺纹杆6的所述第一离合件的所述凹槽15内,所述第二伸缩件14和所述凹槽15接合,所述第二伸缩件14的伸缩端向上缩回至其离开对应的所述凹槽15,所述第二伸缩件14和所述凹槽15分离。基于此技术方案,可以方便的实现第二离合件和第一离合件的接合或分离。
52.在一个实施例中,如图2所示,所述手臂机构包括安装座2和固定在所述安装座2上的连接臂3,所述安装座2固定连所述第二连接块13,所述连接臂3用于安装执行机构。基于此技术方案,可以通过实现第二连接块13不同的速度移动,从而让执行机构的移动实现慢速和快速的改变,提高驱动的精度。
53.在一个实施例中,如图2所示,各所述传动螺纹杆6绕周向以螺纹密度依次增大或缩小的方向设置。基于此技术方案,可以根据需要,实现从快到慢,或从慢到块的顺次调节。
54.在一个实施例中,系统设置控制器,第一伸缩件8、第二伸缩件14均为电控伸缩件,控制器分别电连接第一伸缩件8、第二伸缩件14、调节电机4、驱动电机9。基于该技术方案,可以方便的根据工作需要进行调节,以实现接合和分离。底座1的侧壁设置为透明结构,以便于操作观察。
55.在使用时,操作调节电机4旋转转盘5,按照需要使得传动螺纹杆6到达结合处。操作第二伸缩件14伸长,插入第一连接块7上的限位槽中,再伸长第一伸缩件8使限位栓10插接在限位块11中。接着操作驱动电机9,带动传动螺纹杆6旋转,进而使第二连接块13沿着导向杆12移动。通过不同的第二伸缩件14上的第一连接块7与第二连接块13的接合,实现第二连接块13移动速度的调节,同时提高移动的精度控制。
56.以上仅为本实用新型的较佳实施例而已,并非对本实用新型作任何形式上的限制;凡本行业的普通技术人员均可按说明书附图所示和以上而顺畅地实施本实用新型;但是,凡熟悉本专业的技术人员在不脱离本实用新型技术方案范围内,利用以上所揭示的技术内容而做出的些许更动、修饰与演变的等同变化,均为本实用新型的等效实施例;同时,凡依据本实用新型的实质技术对以上实施例所作的任何等同变化的更动、修饰与演变等,均仍属于本实用新型的技术方案的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。