1.本实用新型涉及医疗器械技术领域,具体涉及一种介入式超声成像装置。
背景技术:
2.超声成像是利用脉冲形成的回波经过信号处理调制后形成图像的方法,在医疗领域中,超声成像广泛运用于b超、彩超、超声三维以及思维的诊断仪中,由于人体组织、脏器和体液具有不同的声速和声阻抗,所以声波在传播途中,遇到不同介质的界面时会反射声波,通过诊断仪来处理反射回的声波所携带的信息。
3.现有技术中,诊断仪可通过穿刺针、导管及其他介入器材,由人体的自然孔道或微小的创口将特定的微型探头导入人体某一部位进行诊断扫描。如专利号cn211066916u公开的“超声引导声影定位平面外血管穿刺装置”,包括超声探头固定架、定位阻声条和穿刺针引导板,超声探头固定架贴合并将本装置固定于超声探头侧面;穿刺针引导板设置在超声探头固定架上,与所述定位阻声条轴向共平面,并在超声探头纵轴与超声成像平面垂直;定位阻声条紧贴超声探头,与超声探头发出的超声成像平面相垂直设置,通过阻挡超声波形成声影;穿刺针引导板上设有穿刺针导针槽。又如专利号cn210447159u公开的“振动穿刺装置及超声成像系统”,振动穿刺装置包括振动激励组件,穿刺件;反馈控制组件用于实时测量振动激励组件的电压以及电流,并基于电压以及电流调整振动激励组件的驱动频率,以使得电压与电流的相位角为零。两者虽然能达到穿刺介入并且通过电子探头或振动激励组件来形成超声成像的目的,但装置只有单一的穿刺直线运动功能,不能够进行位移与角度上的优化调整,而且穿刺时的状态不稳定,容易给诊断的患者带来不适感。
技术实现要素:
4.为解决上述背景技术中提出的问题,本实用新型提供了一种介入式超声成像装置,可以进行位移与角度上的优化调整,以更好适应穿刺针的穿刺状态,具有穿刺运动状态稳定的优点。
5.本实用新型提供如下技术方案:
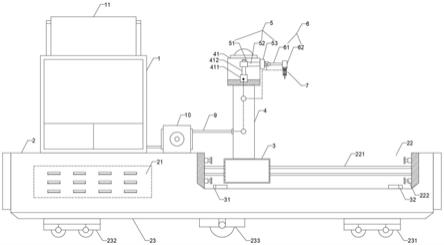
6.一种介入式超声成像装置,包括操作主机和用于承载所述操作主机的基座,所述操作主机上端安装有具有显示图像与录像的显示器,所述基座上端面设有凹腔,所述凹腔内水平设有导轨,所述导轨上滑动连接有直线驱动器,所述直线驱动器上固定连接有立柱,所述立柱上端设有圆柱形的安装座,所述安装座内设有伺服电机,所述伺服电机传动连接有转轴,所述安装座滑动连接有转动关节,所述转动关节末端安装有伸缩关节,所述伸缩关节末端安装有穿刺关节,所述穿刺关节设有具有发射超声波信号以及接收信号回波的探头,所述操作主机电性连接所述显示器以及所述探头,所述基座的外侧边设有防撞护板。
7.优选地,所述转动关节包括与所述转轴连接的固定座、滑动连接所述安装座的转动座,固定连接所述固定座与所述转动座的连杆;所述伸缩关节包括安装在所述转动座一侧面的电动伸缩杆以及支架;所述穿刺关节包括穿刺针以及用于引导定向所述穿刺针运动
的穿刺架,所述穿刺架主要由底板、固定连接所述底板且对称设置的立板以及设置在所述立板之间的螺纹孔板组成,所述支架固定连接所述底板,所述立板之间还设有伺服马达,所述伺服马达输出端传动连接所述穿刺针,所述穿刺针上设有与所述螺纹孔板匹配的螺纹段,所述伺服马达外侧设有外壳,所述外壳上对称设有滑块,所述立板内侧设有滑道,所述滑块滑动连接所述滑道,操作主机分别电性连接所述电动伸缩杆以及所述伺服马达。
8.优选地,所述滑块朝向底板以及所述螺纹孔板的侧面均设有缓冲块,所述底板和所述螺纹孔板朝向所述滑块的侧面均设有氮气弹簧。
9.优选地,所述凹腔内位于所述导轨的初始位置以及末端位置分别设有用于控制控制所述直线驱动器位移的第一位移传感器和第二位移传感器。
10.优选地,所述凹腔内设有沿所述直线驱动器运动方向对称设置的缓冲器。
11.优选地,还包括用于电性连接电子器件的电连接器,所述基座上设有所述电连接器的电缆放卷机构。
12.优选地,还包括用于安装电源的电源腔,所述电源腔设置在所述基座内,所述基座外侧设有连通所述电源腔的散热孔。
13.优选地,还包括用于控制所述基座运动的移动机构,所述移动机构设置在所述基座底部,所述移动机构包括前舵轮、后舵轮以及至少两个对称设置在所述前舵轮与所述后舵轮连接轴线两侧的两个辅助轮,所述前舵轮与所述后舵轮电性连接所述操作主机,所述辅助轮为万向轮。
14.本实用新型的有益效果为:
15.(1):操作主机调整控制转动关节、伸缩关节以及穿刺关节,使位于穿刺针末端的探头能以近距离贴近微创处或人体的自然孔道来获得高清图像,进行位移与角度上的优化调整,更好适应穿刺针的穿刺状态,为诊断患者提供便利服务;
16.(2):设置的移动机构通过前舵轮与后舵轮来实现基座位置的变化,起到运输操作主机以及相应关节的作用,为介入式诊断提供便捷,同时也为穿刺关节提供有效的支撑;
17.(3):探头实现声波信号的发射与回收,通过电连接器传输至操作主机,进行分析声波信号调制成图像或录像输出于显示器上,设置的电缆放卷机构来适应装置内电连接器的长度变化,以补偿电连接器的状态,设置的凹腔提供直线驱动器的运动空间,促进装置结构的紧凑。
附图说明
18.附图用来提供对本实用新型的进一步理解,并且构成说明书的一部分,与本实用新型的实施例一起用于解释本实用新型,并不构成对本实用新型的限制。
19.图1为本实用新型主视的结构示意图;
20.图2为本实用新型侧视的结构示意图;
21.图3为本实用新型传动装置与机架的示意图。
22.图中标记:1
‑
操作主机;11
‑
显示器;2
‑
基座;21
‑
电源腔;22
‑
凹腔;221
‑
导轨;222
‑
缓冲器;23
‑
移动机构;231
‑
前舵轮;232
‑
后舵轮;233
‑
辅助轮;3
‑
直线驱动器;31
‑
第一位移传感器;32
‑
第二位移传感器;4
‑
立柱;41
‑
安装座;411
‑
伺服电机;412
‑
转轴;5
‑
转动关节;51
‑
固定座;52
‑
连杆;53
‑
转动座;6
‑
伸缩关节;61
‑
电动伸缩杆;62
‑
支架;7
‑
穿刺关节;71
‑
穿
刺架;711
‑
底板;712
‑
立板;7121
‑
滑道;713
‑
螺纹孔板;714
‑
氮气弹簧;72
‑
伺服马达;721
‑
外壳;722
‑
滑块;723
‑
缓冲块;73
‑
穿刺针;731
‑
螺纹段;8
‑
探头;9
‑
电连接器;10
‑
电缆放卷机构。
具体实施方式
23.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术进行清楚完全的描述。
24.实施例1:
25.请参阅图1
‑
图3,本实施例提供了一种介入式超声成像装置,包括操作主机1和用于承载操作主机1的基座2,操作主机1上端安装有具有显示图像与录像的显示器11,基座2上端面设有凹腔22,凹腔22内水平设有导轨221,导轨221上滑动连接有直线驱动器3,凹腔22提供直线驱动器3的运动空间,促进装置结构的紧凑,直线驱动器3上固定连接有立柱4,通过直线驱动器3的运动带动立柱4进行运动或复位,立柱4上端设有圆柱形的安装座41,安装座41内设有伺服电机411,伺服电机411传动连接有转轴412,安装座41滑动连接有转动关节5,转动关节5末端安装有伸缩关节6,伸缩关节6末端安装有穿刺关节7,穿刺关节7设有具有发射超声波信号以及接收信号回波的探头8,操作主机1电性连接显示器11以及探头8,基座2的外侧边设有防撞护板,避免因外界碰撞冲击损坏设备。
26.在本实施例中,转动关节5包括与转轴412连接的固定座51、滑动连接安装座41的转动座53,固定连接固定座51与转动座53的连杆52;伸缩关节6包括安装在转动座53一侧面的电动伸缩杆61以及支架62;穿刺关节7包括穿刺针73以及用于引导定向穿刺针73运动的穿刺架71,穿刺架71主要由底板711、固定连接底板711且对称设置的立板712以及设置在立板712之间的螺纹孔板713组成,支架62固定连接底板711,立板712之间还设有伺服马达72,伺服马达72输出端传动连接穿刺针73,穿刺针73上设有与螺纹孔板713匹配的螺纹段731,伺服马达72外侧设有外壳721,外壳721上对称设有滑块722,立板712内侧设有滑道7121,滑块722滑动连接滑道7121,操作主机1分别电性连接电动伸缩杆61以及伺服马达72,滑块722朝向底板711以及螺纹孔板713的侧面均设有缓冲块723,底板711和螺纹孔板713朝向滑块722的侧面均设有氮气弹簧714,缓冲块723与氮气弹簧714配合实现对穿刺关节7内穿刺针73的缓冲减振,加强穿刺针73在穿刺运动极限处的稳定状态。
27.在本实施例中,还包括用于电性连接电子器件的电连接器9,基座2上设有电连接器9的电缆放卷机构10,电缆放卷机构10来适应装置内电连接器9的长度变化,以补偿电连接器9的状态,促进装置结构的紧凑。
28.在本实施例中,还包括用于安装电源的电源腔21,电源腔21设置在基座2内,基座2外侧设有连通电源腔21的散热孔,以降低工作时电源的温度。
29.在本实施例中,还包括用于控制基座2运动的移动机构23,移动机构23设置在基座2底部,移动机构23包括前舵轮231、后舵轮232以及至少两个对称设置在前舵轮231与后舵轮232连接轴线两侧的两个辅助轮233,前舵轮231与后舵轮232电性连接操作主机1,辅助轮233为万向轮,通过前舵轮231与后舵轮232来实现基座2位置的变化,辅助轮233随着前舵轮231与后舵轮232的驱动方向与速度而被动变化,移动机构23可直接选用agv移动小车,采用双舵轮驱动,移动机构23起到运输操作主机1以及相应关节的作用,为介入式诊断提供便
捷。
30.本实用新型工作原理如下,由移动机构23将操作主机1与相应关节输送至待诊断患者处,双舵轮驱动控制位移方向,直线驱动器3将立柱4输送至相应位置,通过操作主机1调整控制转动关节5、伸缩关节6以及穿刺关节7,使位于穿刺针73末端的探头8能以近距离贴近微创处或人体的自然孔道来获得高清图像,进行位移与角度上的优化调整,更好适应穿刺针73的穿刺状态,具体的,伺服电机411带动转轴412偏转至一定位移与角度,固定座51带动连杆52转动,连杆52带动转动座53在安装座41侧面滑动,安装座41外侧面设有相应滑轨,通过电动伸缩杆61带动支架以及穿刺关节7至待穿刺位置上端,进行穿刺时,伺服马达72传动穿刺针73,螺纹段731旋转并通过螺纹啮合螺纹孔板713,利用反作用力使穿刺针73以及伺服马达72向下运动进行穿刺,滑块722与滑道7121进行穿刺位置的导向,使探头8稳定介入贴近道微创处或人体的自然孔,由探头8实现声波信号的发射与回收,通过电连接器9传输至操作主机1,进行分析声波信号调制成图像或录像,通过显示器11输出并记录。
31.实施例2:
32.在上述实施例的基础上,凹腔22内位于导轨221的初始位置以及末端位置分别设有用于控制控制直线驱动器3位移的第一位移传感器31和第二位移传感器32,凹腔22内设有沿直线驱动器3运动方向对称设置的缓冲器222,,通过第一位移传感器31和第二位移传感器32精确控制直线驱动器3运动的极限位置进行快速制动,对称设置的缓冲器222以缓冲保护立柱4以及相应关节,加强装置运动时的稳定性能。
33.上面对本专利的较佳实施方式作了详细说明,但是本专利并不限于上述实施方式,在本领域的普通技术人员所具备的知识范围内,还可以在不脱离本专利宗旨的前提下做出各种变化。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。