1.本发明涉及一种用于控制车辆驾驶以确保在弯曲道路上驾驶期间的安全的系统和方法。
背景技术:
2.车辆经常在弯曲道路以及直行道路上行驶。在弯曲道路上行驶期间,由于不能确保车辆前面的弯曲部分的视野,因此与迎面驶来的车辆碰撞的风险增大。
3.即,在驾驶员在弯曲道路上驾驶车辆的情况下,由于不能确保弯曲部分的视野,因此驾驶员的识别能力降低,并且因此驾驶员不能处理该情况。具体地,在倾斜的弯曲道路上驾驶期间,碰撞的风险进一步增大。
4.在这样的弯曲道路上,为了防止碰撞的风险,通过道路标志传达信息。然而,即使驾驶员通过道路标志识别出风险,驾驶员也难以应对弯曲道路上的突然迎面驶来的车辆。
5.因此,需要一种用于在弯曲道路上行驶期间快速确定在车辆行驶方向上是否存在对象并且快速响应于确定结果以避免车辆碰撞的方法。
6.应当理解,在相关技术中描述的以上内容仅用于促进对本发明的背景技术的理解,而不应被认为是本领域技术人员公知的现有技术。
技术实现要素:
7.因此,鉴于以上问题已经提出了本发明,并且本发明的目的是提供一种用于控制车辆驾驶以通过在车辆在弯曲道路上行驶时避开迎面驶来的车辆来确保驾驶安全性的系统和方法。
8.在一个总体方面,用于控制车辆驾驶的系统包括一个或多个处理器,其被配置为:识别主车辆周围的包括其他车辆的对象,并且收集关于该对象的对象信息;收集主车辆的行驶方向的道路状态的道路状态信息;检查主车辆周围的对象信息和道路状态信息,以识别主车辆能够行驶到的安全区域;并且在主车辆已经进入弯曲道路的状态下,当在主车辆的行驶方向上检测到其他车辆时,控制主车辆行驶到安全区域。
9.该系统可以进一步包括被配置为存储指令的存储器。一个或多个处理器可以被进一步配置为执行该指令以将该一个或多个处理器配置为:识别主车辆周围的包括其他车辆的对象,并且收集关于该对象的对象信息;收集主车辆的行驶方向的道路状态的道路状态信息;检查对象信息和道路状态信息,以识别主车辆能够行驶到的安全区域;并且在主车辆已经进入弯曲道路的状态下,当在主车辆的行驶方向上检测到其他车辆时,控制主车辆行驶到安全区域。
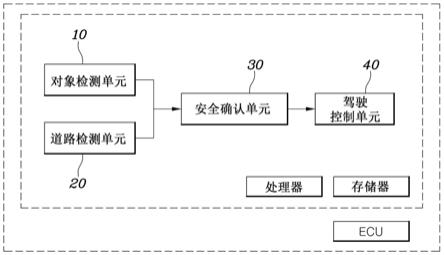
10.该处理器可以包括:对象检测单元,其被配置为识别主车辆周围的包括其他车辆的对象,并且收集关于该对象的对象信息;道路检测单元,其被配置为收集主车辆的行驶方向的道路状态的道路状态信息;安全确认单元,其被配置为检查对象信息和道路状态信息,以识别主车辆能够行驶到的安全区域;以及驾驶控制单元,其被配置为在主车辆已经进入
弯曲道路的状态下,当在主车辆的行驶方向上检测到其他车辆时,控制主车辆行驶到安全区域。
11.驾驶控制单元可以被进一步配置为当在弯曲道路上检测到其他车辆时,控制主车辆沿与其他车辆接近主车辆的方向相对的方向行驶。
12.安全确认单元可以被进一步配置为不将延伸超过主车辆周围的车道中的中心线的范围设置为安全区域。
13.安全确认单元可以被进一步配置为确定主车辆周围的对象信息和安全区域中的道路状态的对象风险等级。驾驶控制单元可以被进一步配置为根据对象风险等级来制动主车辆,使得当主车辆行驶到安全区域时降低主车辆的行驶速度。
14.安全确认单元可以被进一步配置为当对象存在于安全区域中时,设置主车辆与对象之间的安全距离。驾驶控制单元可以被进一步配置为当主车辆行驶到安全区域时,使主车辆与对象分开安全距离或更远。
15.安全确认单元可以被进一步配置为确定主车辆与其他车辆之间的距离和其他车辆的相对速度的距离风险等级。驾驶控制单元可以被进一步配置为根据距离风险等级来校正制动动力和制动定时。
16.安全确认单元可以被进一步配置为当主车辆与其他车辆之间的距离等于或小于预定参考距离时增大距离风险等级。驾驶控制单元可以被进一步配置为根据距离风险等级的增大向上校正制动动力和制动定时。
17.安全确认单元可以被进一步配置为当其他车辆的相对速度等于或高于预定参考速度时增大距离风险等级。驾驶控制单元可以被进一步配置为根据距离风险等级的增大向上校正制动动力和制动定时。
18.安全确认单元可以被进一步配置为当道路状态被确定为上坡道路时降低对象风险等级,并且当道路状态被确定为下坡道路时增大对象风险等级。
19.安全确认单元可以被进一步配置为当道路状态被确定为未铺设道路时增大对象风险等级。
20.安全确认单元可以被进一步配置为当道路状态被确定为光滑状况(slippery condition)时增大对象风险等级。
21.对象检测单元可以被进一步配置为识别道路标志并且通过道路标志收集道路信息。安全确认单元可以被进一步配置为基于通过道路标志收集的道路信息来确定道路信息风险等级。
22.一个或多个处理器可以包括在发动机控制单元(ecu)中。
23.在另一总体方面,用于控制车辆驾驶的方法包括:对象检测操作,用于识别主车辆周围的包括其他车辆的对象,并且收集关于该对象的对象信息;道路检测操作,用于收集主车辆的行驶方向的道路状态的道路状态信息;安全确认操作,用于检查主车辆周围的对象信息和道路状态信息,以识别主车辆能够行驶到的安全区域;以及驾驶控制操作,用于在主车辆已经进入弯曲道路的状态下,当在主车辆的行驶方向上检测到其他车辆时,控制主车辆行驶到安全区域。
24.在驾驶控制操作中,当在弯曲道路上检测到其他车辆时,可以控制主车辆沿与其他车辆接近主车辆的方向相对的方向行驶。
25.在安全确认操作中,延伸超过主车辆周围的车道中的中心线的范围可以不被设置为安全区域。
26.在安全确认操作中,可以根据关于主车辆周围的对象的信息和安全区域中的道路状态来确定对象风险等级。在驾驶控制操作中,可以根据对象风险等级来制动主车辆,使得当主车辆行驶到安全区域时降低主车辆的行驶速度。
27.在安全确认操作中,当对象存在于安全区域中时,可以设置主车辆与对象之间的安全距离。在驾驶控制操作,当主车辆行驶到安全区域时,可以使主车辆与对象分开安全距离或更远。
28.在安全确认操作中,可以根据主车辆与其他车辆之间的距离和其他车辆的相对速度来确定距离风险等级。在驾驶控制操作中,可以根据距离风险等级来校正制动动力和制动定时。
29.在安全确认操作中,当主车辆与其他车辆之间的距离等于或小于预定参考距离时,可以增大距离风险等级。在驾驶控制操作中,可以根据距离风险等级的增大向上校正制动动力和制动定时。
30.在安全确认操作中,当其他车辆的相对速度等于或高于预定参考速度时,可以增大距离风险等级。在驾驶控制操作中,可以根据距离风险等级的增大向上校正制动动力和制动定时。
31.在安全确认操作中,当道路状态被确定为上坡道路时,可以降低对象风险等级,并且当道路状态被确定为下坡道路时,可以增大对象风险等级。
32.在安全确认操作中,当道路状态被确定为未铺设道路时,可以增大对象风险等级。
33.在安全确认操作中,当道路状态被确定为光滑状况时,可以增大对象风险等级。
34.在对象检测操作中,可以识别道路标志并且可以通过道路标志收集道路信息。在安全确认操作中,可以基于通过道路标志收集的道路信息来确定道路信息风险等级。
35.非暂时性计算机可读存储介质可以存储指令,当被一个或多个处理器执行时该指令使该一个或多个处理器执行以上方法。
36.从以下详细描述、附图和权利要求书中,其他特征和方面将是显而易见的。
附图说明
37.图1是根据本发明的用于控制车辆驾驶的系统的配置图。
38.图2是示出根据图1所示的用于控制车辆驾驶的系统的避开行驶的示图。
39.图3是用于描述图1所示的用于控制车辆驾驶的系统的示图。
40.图4是根据本发明的用于控制车辆驾驶的方法的流程图。
具体实施方式
41.在下文中,将参考附图描述根据本发明的优选实施例的用于控制车辆驾驶的系统和方法。
42.图1是根据本发明的用于控制车辆驾驶的系统的配置图,图2是示出根据图1所示的用于控制车辆驾驶的系统的避让行驶的示图,图3是用于描述图1所示的用于控制车辆驾驶的系统的示图,并且图4是根据本发明的用于控制车辆驾驶的方法的流程图。
43.本发明可以应用于由驾驶员驾驶的车辆,并且还可以应用于自动驾驶车辆。即,本发明允许驾驶员脱离驾驶员无法识别的可能发生碰撞风险的情况,并且不仅可以由驾驶员而且可以根据ecu的控制来执行驾驶。
44.ecu是指包括存储器和处理器的硬件装置,该处理器被配置为执行被解释为算法结构的一个或多个步骤。存储器存储算法步骤,并且处理器执行算法步骤以执行根据本发明的各种示例性实施例的方法的一个或多个处理。根据本发明的示例性实施例的ecu可以通过被配置为存储用于控制车辆的各个组件的操作的算法或关于用于执行算法的软件命令的数据的非易失性存储器以及被配置为使用存储在存储器中的数据执行上述操作的处理器来实现。存储器和处理器可以是单独的芯片。可选地,存储器和处理器可以集成在单个芯片中。该处理器可以被实现为一个或多个处理器。
45.此外,处理器可以由预定程序操作,该预定程序可以包括用于执行根据本发明的各种示例性实施例的方法的一系列命令。
46.如图1所示,根据本发明的用于控制车辆驾驶的系统包括:对象检测单元10,其识别包括主车辆1周围的其他车辆2的对象,并且收集关于该对象的信息;道路检测单元20,其收集关于主车辆1的行驶方向的道路状态的信息;安全确认单元30,其检查关于主车辆1周围的对象的信息和道路状态,以识别主车辆1可以行驶到的安全区域a;以及驾驶控制单元40,其在主车辆1已经进入弯曲部分的状态下,当在主车辆1的行驶方向上检测到其他车辆2时,控制主车辆1行驶到安全区域a。
47.这里,对象检测单元10可以从各种传感器收集关于主车辆1周围的其他车辆2的信息。传感器可是lidar、相机、雷达和超声波传感器,并且其可以获取关于其他车辆2的形状、大小、速度、距离等的信息,并且识别各种障碍物3。
48.道路检测单元20可以被配置为与对象检测单元10相同的传感器,检测道路状态,并且另外通过导航系统接收天气信息,并且获取关于直线道路、弯曲道路、上坡道路和下坡道路的各种类型的道路信息。
49.以这种方式通过对象检测单元10和道路检测单元20输入的关于其他车辆2和道路的信息被提供给安全确认单元30,并且安全确认单元30基于所输入的信息来识别主车辆1可以行驶到的安全区域a。这里,安全区域a是主车辆1在行驶时不受其他车辆2或障碍物3的干扰的区域,并且可以根据其他车辆2的行驶路线和是否存在其他车辆2或障碍物3来设置。因此,当道路检测单元20检测到主车辆1进入弯曲部分并且对象检测单元10检测到行驶方向上的其他车辆2时,驾驶控制单元40控制主车辆1行驶到通过安全确认单元30确保的安全区域a,使得主车辆1避免与沿相对方向行驶的其他车辆2碰撞。以这种方式,本发明提高了在事故率高的弯曲道路上的驾驶安全性,以向乘客提供驾驶可靠性。
50.将详细描述本发明。如图2所示,当在弯曲道路上检测到其他车辆2时,驾驶控制单元40可以控制主车辆1沿与其他车辆2朝向主车辆1行驶的方向相对的方向行驶。驾驶控制单元40控制主车辆1的行驶,并且当其他车辆2接近主车辆1时,控制主车辆1行驶到安全区域a,使得主车辆1避免与其他车辆2碰撞。这里,驾驶控制单元40可以使主车辆1沿与其他车辆2接近主车辆1周围的安全区域a的方向相对的方向行驶,使得主车辆1可以避开迎面驶来的车辆2,以防止与其他车辆2碰撞。
51.安全确认单元30不将延伸超过主车辆1周围的车道中的中心线4的范围设置为安
全区域a。
52.道路被划分为限定相同行驶方向的车道和限定相对行驶方向的车道。具体地,中心线4沿相对的行驶方向划分车道,并且当车辆穿过中心线4时,事故风险非常高。
53.因此,安全确认单元30将其中没有其他车辆2或障碍物3的区域设置为安全区域a,并且将安全区域a设置为使得其不延伸超过中心线4从而避免与相对车道中的车辆碰撞。
54.安全确认单元30可以根据关于主车辆1周围的对象的信息和安全区域a中的道路状态来确定并分类风险等级,并且驾驶控制单元40可以响应于风险等级来制动主车辆1,使得当主车辆1行驶到安全区域a时降低主车辆1的行驶速度。
55.当以这种方式设置安全区域a时,安全确认单元30根据对象信息和道路信息对风险等级进行分类,并且因此可以在通过驾驶控制单元40制动车辆时执行有效制动。因此,当道路检测单元20检测到主车辆1进入弯曲部分并且对象检测单元10检测到主车辆1的行驶方向上的其他车辆2时,驾驶控制单元40使主车辆1行驶到安全区域a,使得主车辆1避免与相对方向上的迎面驶来的车辆2碰撞。另外,驾驶控制单元40根据通过安全确认单元30确定的风险等级执行制动,使得主车辆1降低行驶速度,从而有效且稳定地避免与其他车辆2碰撞。此外,即使主车辆1不能完全避免与其他车辆2碰撞,也可以根据主车辆1的制动来减少由于碰撞而引起的冲击。
56.具体地,安全确认单元30可以根据主车辆1与其他车辆2之间的距离和其他车辆2的相对速度来确定并分类风险等级,并且驾驶控制单元40可以根据风险等级来校正制动动力和制动定时。
57.以这种方式,安全确认单元30根据主车辆1与对象之间的距离和其他车辆2的相对速度对风险等级进行分类,使得根据所确定的风险等级来校正制动动力和制动定时。然后,驾驶控制单元40将制动动力和制动定时校正到通过安全确认单元30确定的风险等级,使得主车辆1稳定地避开其他车辆2。即,当主车辆1与其他车辆2之间的距离短或其他车辆2的相对速度高时,与其他车辆2碰撞的风险高。在这种情况下,增大制动压力以执行强烈制动,并且提前制动定时以快速执行制动。另一方面,当主车辆1与其他车辆2之间的距离长或其他车辆2的相对速度低时,与其他车辆2碰撞的风险低,并且因此执行平稳的制动。
58.这里,风险等级可以被划分为多个阶段。例如,当安全区域a中没有对象时,安全区域a被设置为风险等级0,当主车辆1接近对象时,风险等级被提高到阶段1以向上校正制动动力和制动定时,并且当其他车辆2的相对速度高时,风险等级被进一步提高到阶段2以向上校正制动动力和制动定时。这里,向上校正制动动力是为了增大制动压力,并且可以预先存储能够根据主车辆1与其他车辆2之间的距离确保安全的制动动力。此外,向上校正制动定时是为了使制动定时提前,并且可以预先存储能够根据主车辆1与其他车辆2之间的距离确保安全的制动定时。
59.在主车辆已经进入弯曲部分的状态下,在检测到其他车辆2的情况下,当驾驶控制单元40使主车辆1行驶到安全区域a,并且以这种方式在根据通过安全确认单元30确定的风险等级的制动定时用制动动力制动主车辆1时,确保了主车辆1可以避开其他车辆2的足够时间,并且因此主车辆1可以容易地避开其他车辆2。此外,即使主车辆1不能避开其他车辆2,也根据快速制动降低行驶速度以减小冲击。
60.更具体地,当主车辆1与其他车辆2之间的距离等于或小于预定参考距离时,安全
确认单元30可以增大风险等级,并且驾驶控制单元40可以根据增大的风险等级向上校正制动动力和制动定时。这里,参考距离是预先存储的值,其可以根据取决于主车辆1的大小和重量的制动距离来设置。
61.即,当主车辆1与其他车辆2之间的距离等于或小于参考距离时,与其他车辆2碰撞的风险高,并且因此增大风险等级,并且制动动力和制动定时向上校正,使得通过强烈制动稳定地执行避免主车辆1与其他车辆2之间的碰撞。
62.当安全确认单元30根据主车辆1与其他车辆2之间的距离调整风险等级时,驾驶控制单元40使主车辆1行驶到安全区域a,并且同时,在主车辆1已经进入弯曲部分的状态下检测到其他车辆2时,根据风险等级校正的制动定时以制动动力制动主车辆1。因此,根据增大的风险等级,在提前的制动定时以增大的制动动力执行快速且强烈的制动,并且从而确保了主车辆1可以避开其他车辆2的时间。因此,主车辆1可以容易地避开其他车辆2,并且即使主车辆1不能避开其他车辆2,也根据快速制动降低行驶速度以减少冲击。
63.同时,当其他车辆2的相对速度等于或高于预定参考速度时,安全确认单元30可以增大风险等级,并且驾驶控制单元40可以根据增大的风险等级向上校正制动动力和制动定时。
64.即,对象检测单元10可以收集关于其他车辆2的速度信息,并且安全确认单元30可以通过接收关于其他车辆2的速度信息并将该速度信息与预先存储的参考速度进行比较来确定风险等级。即,当接近主车辆1的其他车辆2的速度高时,主车辆1可以缓慢地响应其他车辆2,或者在碰撞的情况下可能增大冲击,并且因此根据其他车辆2的速度调整风险等级。
65.具体地,当其他车辆2的相对速度等于或高于参考速度时,安全确认单元30增大风险等级。这里,参考速度是主车辆1可以响应并避开接近主车辆1的其他车辆2的速度,并且被预先导出并存储。即,当其他车辆2的相对速度等于或高于参考速度时,增大主车辆1与其他车辆2之间的碰撞风险,并且因此安全确认单元30增大风险等级,并且驾驶控制单元40根据增大的风险等级向上校正制动动力和制动定时以快速制动主车辆1。因此,主车辆1可以响应在弯曲部分中检测到的其他车辆2,并且安全地避开其他车辆2。即使主车辆1不能避开其他车辆2,也根据快速制动来减少冲击。
66.同时,当在安全区域a中存在对象时,安全确认单元30可以设置主车辆1与对象之间的安全距离,并且当主车辆1行驶到安全区域a时,驾驶控制单元40可以使主车辆1与对象分开安全距离或更远。
67.即,除了车辆之外,诸如护栏的各种障碍物3也可以位于道路上。因此,驾驶控制单元40通过对象检测单元10接收关于障碍物3的信息,并且控制车辆,使得车辆在不存在障碍物3的区域中行驶,或者在保持与障碍物3的安全距离或更远的同时行驶。这里,安全距离可以根据主车辆1的形状和大小来设置,并且设置为主车辆1不与障碍物3碰撞以避免碰撞的距离。
68.以这种方式,通过确认主车辆1周围的障碍物3,并且考虑到障碍物3而避免与其他车辆2碰撞,从而进一步确保了行驶稳定性。
69.当道路状态被确定为上坡道路时,安全确认单元30可以降低风险等级,并且当道路状态被确定为下坡道路时,安全确认单元30可以增大风险等级。
70.即,当主车辆1在上坡道路上行驶时,即使以低制动动力也可以快速制动主车辆1。
因此,安全确认单元30降低风险等级,使得当主车辆1在上坡道路上行驶时,驾驶控制单元40以向下校正的制动定时用向下校正的制动动力来制动主车辆1。因此,当在弯曲部分中检测到其他车辆2时,在主车辆1可以避开其他车辆2的情况下,防止过度制动使乘客感到不适。另一方面,当主车辆1在下坡道路上行驶时,即使以高制动动力也可以缓慢地制动主车辆。因此,安全确认单元30增大风险等级,使得当主车辆1在下坡道路上行驶时,驾驶控制单元40以向上校正的制动定时用向上校正的制动动力制动主车辆1。因此,当在弯曲部分中检测到其他车辆2时,主车辆1根据快速且强烈的制动被稳定地制动,并且因此可以安全地避开其他车辆2。
71.当道路状态被确定为未铺设道路时,安全确认单元30可以增大风险等级。在铺设道路的情况下可以执行正常制动,而在未铺设道路的情况下,由于不平坦的路面可能无法执行正常制动。因此,当主车辆1进入未铺设道路时,安全确认单元30增大风险等级,使得驾驶控制单元40向上校正制动动力和制动定时以执行稳定的制动。以这种方式,通过以高制动动力快速制动主车辆1,主车辆1即使在未铺设道路上也可以避免与其他车辆2碰撞。
72.此外,当道路状态被确定为光滑状况时,安全确认单元30可以增大风险等级。这里,道路检测单元20可以通过天气信息、雨水传感器等识别具有光滑路面的环境,并且将关于该环境的信息发送到安全确认单元30。
73.以这种方式,当通过道路检测单元20确定道路状态为光滑状况时,安全确认单元30可以增大风险等级,使得驾驶控制单元40根据增大的风险等级向上校正制动动力和制动定时。因此,即使当制动期间主车辆1打滑时,也可以稳定地制动主车辆1。
74.对象检测单元10可以识别道路标志并且通过道路标志收集道路信息,并且安全确认单元30可以基于通过道路标志收集的道路信息来确定风险等级。
75.在道路上设置了用于向驾驶员提供道路信息的各种道路标志。具体地,设置道路标志以允许驾驶员提前识别出频繁的事故区域、陡峭的斜坡和陡峭的弯曲部分。因此,对象检测单元10可以识别道路标志并且收集关于主车辆1正在行驶的道路的信息以确定道路的风险程度。可以根据道路标志上的信息设置风险等级,并且可以根据坡度或弯曲角度来细分风险等级。根据道路标志的这种风险等级可以预先存储在安全确认单元30中。当安全确认单元30基于道路标志确定风险等级时,驾驶控制单元40可以将制动动力和制动定时校正到所确定的风险等级。
76.如上所述,本发明可以通过安全确认单元30根据每种情况设置风险等级,并且通过驾驶控制单元40根据所设置的风险等级向上或向下校正制动动力和制动定时,根据各种道路情况执行稳定且精确的制动控制。
77.如图4所示,根据本发明的用于控制车辆驾驶的方法包括:对象检测步骤s10,用于识别包括主车辆1周围的其他车辆2的对象,并且收集关于该对象的信息;道路检测步骤s20,用于收集关于主车辆1的行驶方向的道路状态的信息;安全确认步骤s30,用于检查关于主车辆1周围的对象信息和道路状态,以识别主车辆1可以行驶到的安全区域a;以及驾驶控制步骤s40,用于在主车辆1已经进入弯曲部分的状态下,当在主车辆1的行驶方向上检测到其他车辆2时,控制主车辆1行驶到安全区域a。
78.因此,当主车辆1进入弯曲部分并且在主车辆1的行驶方向上检测到其他车辆2时,使主车辆1行驶到安全区域a,并且因此避免与相对方向上行驶的其他车辆2碰撞。以这种方
式,本发明提高了在事故率高的弯曲道路上的驾驶安全性以向乘客提供驾驶可靠性。
79.在驾驶控制步骤s40中,当在弯曲部分中检测到其他车辆2时,控制主车辆1沿与其他车辆2接近主车辆1的方向相对的方向行驶,使得主车辆1可以避开迎面驶来的车辆2以防止与其他车辆2碰撞。
80.在安全确认步骤s30中,主车辆1周围的车道的中心线4以外的范围不被设置为安全区域a,使得主车辆1避免与超过中心线4的相对车道中的车辆碰撞。
81.在安全确认步骤s30中,根据关于主车辆1周围的对象的信息和安全区域a中的道路状态来确定并分类风险等级。在驾驶控制步骤s40中,当行驶到安全区域a时,可以响应于风险等级制动主车辆1以降低行驶速度。因此,在驾驶控制步骤s40中,根据通过安全确认步骤s30确定的风险等级制动主车辆1,使得降低主车辆1的行驶速度,并且因此主车辆1可以容易地避免与其他车辆2碰撞。此外,即使主车辆1不能完全避开其他车辆2,也可以根据主车辆1的制动来减少由于碰撞而引起的冲击。
82.当在安全区域a中存在对象时,可以在安全确认步骤s30中设置主车辆1与对象之间的安全距离,并且在驾驶控制步骤s40中,当行驶到安全区域a时,主车辆1可以与对象分开安全距离或更远。以这种方式,通过确认主车辆1周围的障碍物3,并且考虑到障碍物3而避免与其他车辆2碰撞,从而进一步确保了行驶稳定性。
83.此外,在安全确认步骤s30中,可以根据主车辆1与其他车辆2之间的距离和其他车辆2的相对速度来确定并分类风险等级,并且在驾驶控制步骤s40中,可以根据风险等级来校正制动动力和制动定时。
84.即,当主车辆1与其他车辆2之间的距离等于或小于预定参考距离时,在安全确认步骤s30中,可以增大风险等级,并且在驾驶控制步骤s40中,可以根据增大的风险等级向上校正制动动力和制动定时。
85.此外,当其他车辆2的相对速度等于或高于预定参考速度时,在安全确认步骤s30中,可以增大风险等级,并且在驾驶控制步骤s40中,可以根据增大的风险等级向上校正制动动力和制动定时。
86.当根据主车辆1与其他车辆2之间的距离和其他车辆2的相对速度确定风险等级时,根据所确定的风险等级校正制动动力和制动定时,并且如上所述,在校正的制动定时用校正的制动动力制动主车辆1,主车辆1可以响应在弯曲部分中检测到的其他车辆2,并且安全地避开其他车辆2。即使主车辆1不能避开其他车辆2,也根据快速制动来减少冲击。
87.在安全确认步骤s30中,当道路状态被确定为上坡道路时,可以降低风险等级,并且当道路状态被确定为下坡道路时,可以增大风险等级。以这种方式,在具有低驾驶风险的上坡道路的情况下降低风险等级以防止过度制动,并且在具有高驾驶风险的下坡道路的情况下增大风险等级以通过快速制动确保驾驶安全性。
88.此外,在安全确认步骤s30中,当道路状态被确定为未铺设道路时,可以增大风险等级。在铺设道路的情况下可以执行正常制动,而在未铺设道路的情况下,由于不平坦的路面可能无法执行正常制动。因此,当主车辆1进入未铺设道路时,在安全确认步骤s30中增大风险等级,并且在驾驶控制步骤s40中向上校正制动动力和制动定时。
89.此外,在安全确认步骤s30中,当道路状态被确定为光滑状况时,可以增大风险等级。以这种方式,当通过道路检测单元20确定道路状态为光滑状况时,在安全确认步骤s30
中,可以增大风险等级,并且在驾驶控制步骤s40中,可以根据增大的风险等级向上校正制动动力和制动定时。因此,即使当制动期间主车辆1打滑时,也可以稳定地制动主车辆1。
90.此外,可以在对象检测步骤s10中检测到道路标志并且可以通过道路标志收集道路信息,并且可以在安全确认步骤s30中基于通过道路标志收集的道路信息来确定风险等级。
91.即,安装在道路上的道路标志提供各种类型的道路信息,并且主车辆1根据通过道路标志收集的信息设置风险等级。根据道路标志的这种风险等级可以预先存储。当基于道路标志确定风险等级时,可以将制动动力和制动定时校正到所确定的风险等级,从而可以执行稳定且安全的制动。
92.根据如上配置的用于控制车辆驾驶的系统和方法,当车辆在弯曲道路上行驶时可以避开迎面驶来的车辆,并且因此确保了驾驶安全性。此外,通过根据车辆的碰撞风险程度执行制动并根据道路状态调整制动动力和制动定时以提高安全性,可以有效地避开迎面驶来的车辆。
93.尽管已经出于说明性目的公开了本发明的优选实施例,但是本领域技术人员将理解,在不脱离如所附权利要求中公开的本发明的范围和精神的情况下,各种修改、添加和替换是可能的。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。