技术特征:
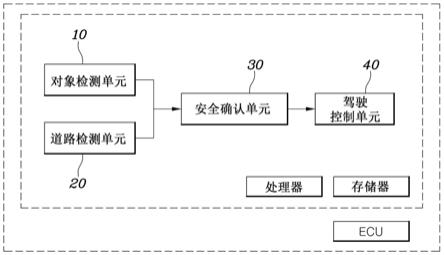
1.一种用于控制车辆驾驶的系统,包括:一个或多个处理器,被配置为:识别主车辆周围的包括其他车辆的对象,并且收集关于所述对象的对象信息;收集所述主车辆的行驶方向的道路状态的道路状态信息;检查所述主车辆周围的所述对象信息和所述道路状态信息,以识别所述主车辆能够行驶到的安全区域;并且在所述主车辆已经进入弯曲道路的状态下,当在所述主车辆的所述行驶方向上检测到所述其他车辆时,控制所述主车辆行驶到所述安全区域。2.根据权利要求1所述的系统,进一步包括:存储器,所述存储器被配置为存储指令;其中,所述一个或多个处理器被进一步配置为执行所述指令以将所述一个或多个处理器配置为:识别所述主车辆周围的包括所述其他车辆的所述对象,并且收集关于所述对象的所述对象信息;收集所述主车辆的所述行驶方向的所述道路状态的所述道路状态信息;检查所述对象信息和所述道路状态信息,以识别所述主车辆能够行驶到的所述安全区域;并且在所述主车辆已经进入所述弯曲道路的所述状态下,当在所述主车辆的所述行驶方向上检测到所述其他车辆时,控制所述主车辆行驶到所述安全区域。3.根据权利要求1所述的系统,其中,所述处理器包括:对象检测单元,被配置为识别所述主车辆周围的包括所述其他车辆的所述对象,并且收集关于所述对象的所述对象信息;道路检测单元,被配置收集所述主车辆的所述行驶方向的所述道路状态的所述道路状态信息;安全确认单元,被配置为检查所述对象信息和所述道路状态信息,以识别所述主车辆能够行驶到的所述安全区域;以及驾驶控制单元,被配置为在所述主车辆已经进入所述弯曲道路的所述状态下,当在所述主车辆的所述行驶方向上检测到所述其他车辆时,控制所述主车辆行驶到所述安全区域。4.根据权利要求3所述的系统,其中,所述安全确认单元被进一步配置为确定所述主车辆与所述其他车辆之间的距离的距离风险等级和所述其他车辆的相对速度,并且所述驾驶控制单元被进一步配置为根据所述距离风险等级校正制动动力和制动定时。5.根据权利要求4所述的系统,其中,所述安全确认单元被进一步配置为当所述主车辆与所述其他车辆之间的所述距离等于或小于预定参考距离时增大所述距离风险等级,并且所述驾驶控制单元被进一步配置为根据所述距离风险等级的所述增大向上校正所述制动动力和所述制动定时。6.根据权利要求4所述的系统,其中,所述安全确认单元被进一步配置为当所述其他车辆的所述相对速度等于或高于预定参考速度时增大所述距离风险等级,并且所述驾驶控制单元被进一步配置为根据所述距离风险等级的所述增大向上校正所述制动动力和所述制动定时。
7.根据权利要求3所述的系统,其中,所述安全确认单元被进一步配置为当所述道路状态被确定为上坡道路时降低对象风险等级,并且当所述道路状态被确定为下坡道路时增大所述对象风险等级。8.根据权利要求3所述的系统,其中,所述安全确认单元被进一步配置为当所述道路状态被确定为未铺设道路时增大对象风险等级。9.根据权利要求3所述的系统,其中,所述安全确认单元被进一步配置为当所述道路状态被确定为光滑状况时增大对象风险等级。10.根据权利要求3所述的系统,其中,所述对象检测单元被进一步配置为识别道路标志并且通过所述道路标志收集道路信息,并且所述安全确认单元被进一步配置为基于通过所述道路标志收集的所述道路信息来确定道路信息风险等级。11.根据权利要求1所述的系统,其中,所述一个或多个处理器包括在发动机控制单元中。12.一种用于控制车辆驾驶的方法,包括以下步骤:对象检测操作,用于识别主车辆周围的包括其他车辆的对象,并且收集关于所述对象的对象信息;道路检测操作,用于收集所述主车辆的行驶方向的道路状态的道路状态信息;安全确认操作,用于检查所述主车辆周围的所述对象信息和道路状态信息,以识别所述主车辆能够行驶到的安全区域;以及驾驶控制操作,用于在所述主车辆已经进入弯曲道路的状态下,当在所述主车辆的所述行驶方向上检测到所述其他车辆时,控制所述主车辆行驶到所述安全区域。13.根据权利要求12所述的方法,其中,在所述驾驶控制操作中,当在所述弯曲道路上检测到所述其他车辆时,控制所述主车辆沿与所述其他车辆接近所述主车辆的方向相对的方向行驶。14.根据权利要求12所述的方法,其中,在所述安全确认操作中,延伸超过所述主车辆周围的车道中的中心线的范围不被设置为安全区域。15.根据权利要求12所述的方法,其中,在所述安全确认操作中,根据关于所述主车辆周围的对象的信息和所述安全区域中的道路状态来确定对象风险等级,并且在所述驾驶控制操作中,根据所述对象风险等级来制动所述主车辆,使得当所述主车辆行驶到所述安全区域时降低所述主车辆的行驶速度。16.根据权利要求15所述的方法,其中,在所述安全确认操作中,当所述对象存在于所述安全区域中时,设置所述主车辆与所述对象之间的安全距离,并且在所述驾驶控制操作中,当所述主车辆行驶到所述安全区域时,使所述主车辆与所述对象分开所述安全距离或更远。17.根据权利要求15所述的方法,其中,在所述安全确认操作中,根据所述主车辆与所述其他车辆之间的距离和所述其他车辆的相对速度来确定距离风险等级,并且在所述驾驶控制操作中,根据所述距离风险等级来校正制动动力和制动定时。18.根据权利要求17所述的方法,其中,在所述安全确认操作中,当所述主车辆与所述其他车辆之间的所述距离等于或小于预定参考距离时增大所述距离风险等级,并且在所述驾驶控制操作中,根据所述距离风险等级的所述增大向上校正所述制动动力和所述制动定
时。19.根据权利要求17所述的方法,其中,在所述安全确认操作中,当所述其他车辆的所述相对速度等于或高于预定参考速度时增大所述距离风险等级,并且在所述驾驶控制操作中,根据所述距离风险等级的所述增大向上校正所述制动动力和所述制动定时。20.一种存储有指令的非暂时性计算机可读存储介质,当被一个或多个处理器执行时所述指令使所述一个或多个处理器执行权利要求12所述的方法。
技术总结
一种用于控制车辆驾驶的系统和方法及计算机可读存储介质,该系统包括一个或多个处理器,其被配置为:识别主车辆周围的包括其他车辆的对象,并且收集关于该对象的对象信息;收集主车辆的行驶方向的道路状态的道路状态信息;检查主车辆周围的对象信息和道路状态信息,以识别主车辆能够行驶到的安全区域;并且在主车辆已经进入弯曲道路的状态下,当在主车辆的行驶方向上检测到其他车辆时,控制主车辆行驶到安全区域。行驶到安全区域。行驶到安全区域。
技术研发人员:朴志旿
受保护的技术使用者:现代摩比斯株式会社
技术研发日:2021.05.31
技术公布日:2021/12/7
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。