1.本发明涉及医疗器械技术领域,具体涉及一种医用碎石机器人。
背景技术:
2.目前,针对患者体内胆道结石、尿路结石的碎石技术大致有超声波碎石、经自然管腔胆道镜或输尿管镜下的取石网取石、在十二指肠乳头的造影下逆行取石;若遇到部分结石较大或者结石较硬时,使用钬激光、液电或气压弹道碎石;但目前的技术存在取石效率低、操作者技术要求高、部分结石难以取出等问题,医生常常花费数小时仍不能取尽结石。
技术实现要素:
3.针对现有技术的上述不足,本发明提供了一种取石效率高的医用碎石机器人。
4.为达到上述发明目的,本发明所采用的技术方案为:
5.提供一种医用碎石机器人,包括碎石仓,碎石仓的一端设置有摄像头、喷水口和器械导丝口,碎石仓的另一端设置有蠕动仓;碎石仓中设置有碎石组件和第一转向组件,蠕动仓中设置有蠕动组件和第二转向组件;碎石仓设置有第一入口和第一出口,蠕动仓设置有第二入口和第二出口,第一出口和第二入口相通。
6.采用上述技术方案的有益效果为:摄像头用于发现结石位置,喷水口喷射水用于结石润湿;碎石仓通过碎石组件将结石破碎,并通过第一转向组件实现该机器人的前部的转向;蠕动仓通过蠕动组件实现机器人的前进或倒退,并通过第二转向组件实现该机器人中部的转向;第一出口和第二入口相通,使第一入口进入的结石经破碎后依次进入第一出口和第二入口,并从第二出口排出。
7.进一步地,第一转向组件包括若干第一电磁铁,第一电磁铁沿周向均匀设置在碎石仓靠近第一出口的一端,第一电磁铁远离第一出口的一端通过弹簧连接有安装板,安装板的一端铰接有若干第一安装架,若干第一安装架上均滑动设置有连接架,连接架的一端铰接在碎石仓内。
8.采用上述技术方案的有益效果为:第一电磁铁可吸引安装板,通过控制第一电磁铁的磁力强弱可以控制安装板偏转,进而使安装板上的第一安装架随之偏转,从而实现机器人前部的转向,另外,若干第一电磁铁以同样的磁力吸引安装板时,安装板向第一电磁铁方向移动,若干第一安装架在连接架的约束下逐渐撑开,当第一电磁铁停止吸引时,在弹簧的作用下,若干第一安装架又逐渐收回,从而实现第一安装架前端的变径,进而方便将结石吞入碎石仓。
9.进一步地,碎石组件包括沿轴向固定在碎石仓内的第二安装架和设置在若干第一安装架一端的第一支架,第一支架和第二安装架上滑动设置有齿链;第二安装架靠近第一出口的一端设置有空心轴电机,空心轴电机的输出端与齿链啮合。
10.采用上述技术方案的有益效果为:空心轴电机带动齿链转动,齿链在第一支架和第二安装架上滑动,从而对结石进行切割并将第一支架处的结石带往碎石仓内部。
11.进一步地,第二安装架的两端分别设置有第二支架和第三支架,第一支架和第三支架为圆弧形支架,第二支架为圆形支架;第二安装架、第一支架、第二支架和第三支架上均设置有滑轨。
12.采用上述技术方案的有益效果为:齿链在第二安装架、第一支架、第二支架和第三支架的滑轨中滑动,形成闭合的齿链,在空心轴电机的带动下,循环地切割。
13.进一步地,空心轴电机的空心轴设置有螺旋形的内壁,空心轴与第一出口相通。
14.采用上述技术方案的有益效果为:螺旋形的内壁有利于将结石碎屑从空心轴的一端带到第一出口。
15.进一步地,蠕动组件包括沿轴向固定在蠕动仓内的滑杆,滑杆上滑动设置有若干滑动板,滑动板上均固定有第二电磁铁;相邻两块滑动板之间设置有第一弹性钢片,相邻两块滑动板通过连杆连接有第二弹性钢片,第二弹性钢片的一端穿过蠕动仓,且第二弹性钢片的一端设置有硅胶蠕动足。
16.采用上述技术方案的有益效果为:第二电磁铁产生磁力,若干滑动板相互靠近,第二电磁铁磁力消失,在第一弹性钢片的作用下,若干滑动板远离;滑动板的靠近和远离带动硅胶蠕动足开始蠕动,从而实现前进或后退。
17.进一步地,滑动板的中部设置有通孔。
18.采用上述技术方案的有益效果为:滑动板的中部设置有通孔,方便结石碎屑的通过。
19.进一步地,第一出口与滑动板之间、相邻两块滑动板之间、滑动板与第二出口之间均设置有弹性套。
20.采用上述技术方案的有益效果为:设置弹性套,为结石碎屑的排出提供通道,使排石碎屑能通过第一出口、弹性套和通孔排到第二出口。
21.进一步地,第二转向组件包括推拉杆和牵引绳,推拉杆固定在第二弹性钢片上,牵引绳连接在靠近第二进口的滑动板上。
22.采用上述技术方案的有益效果为:推拉杆改变第二弹性钢片的弯折角度,进而改变硅胶蠕动足的角度,以实现蠕动仓中部的转向;牵引绳拉动靠近第二进口的滑动板,以实现蠕动仓前部的转向。
23.进一步地,蠕动仓的一端设置有集线通道。
24.采用上述技术方案的有益效果为:集线通道用于归集摄像头控制线、喷水口所需管道、导丝、空心轴电机控制线、第一电磁铁控制线、第二电磁铁控制线、推拉杆和牵引绳,且有利于医生在人体外进行控制。
25.本发明的有益效果为:摄像头用于发现结石位置,喷水口喷射水用于结石润湿;碎石仓通过碎石组件将结石破碎,并通过第一转向组件实现该机器人的前部的转向;蠕动仓通过蠕动组件实现机器人的前进或倒退,并通过第二转向组件实现该机器人中部的转向;第一出口和第二入口相通,使第一入口进入的结石经破碎后依次进入第一出口和第二入口,并从第二出口排出。
附图说明
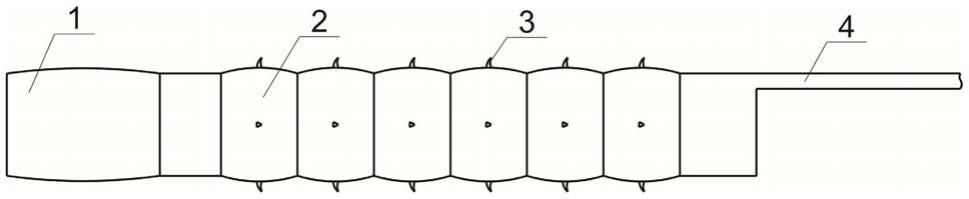
26.图1为本发明实施例的主视图;
27.图2为本发明实施例中碎石仓的结构示意图;
28.图3为图2的左视图;
29.图4为本发明实施例中蠕动仓的结构示意图;
30.图5为图2中a处的结构示意图;
31.其中,1、碎石仓,2、蠕动仓、3、硅胶蠕动足,4、集线通道,5、摄像头,6、第一安装架,7、连接架,8、安装板,9、弹簧,10、第一电磁铁,11、第一出口,12、空心轴电机,13、内壁,14、第二支架,15、齿链,16、第二安装架,17、第三支架,18、第一入口,19、第一支架,20、喷水口,21、器械导丝口,22、第二入口,23、滑动板,24、牵引绳,25、滑杆,26、弹性套,27、通孔,28、第一弹性钢片,29、连杆,30、第二弹性钢片,31、推拉杆,32、第二出口,33、滑轨。
具体实施方式
32.下面对本发明的具体实施方式进行描述,以便于本技术领域的技术人员理解本发明,但应该清楚,本发明不限于具体实施方式的范围,对本技术领域的普通技术人员来讲,只要各种变化在所附的权利要求限定和确定的本发明的精神和范围内,这些变化是显而易见的,一切利用本发明构思的发明创造均在保护之列。
33.如图1
‑
4所示,本方案提供一种医用碎石机器人,包括碎石仓1,碎石仓1的一端设置有摄像头5、喷水口20和器械导丝口21,碎石仓1的另一端设置有蠕动仓2,碎石仓1和蠕动仓2外均设置有亲水橡胶表皮,且亲水橡胶表皮上均设置有褶皱,方便伸缩;碎石仓1中设置有碎石组件和第一转向组件,蠕动仓2中设置有蠕动组件和第二转向组件;碎石仓1设置有第一入口18和第一出口11,蠕动仓2设置有第二入口22和第二出口32,第一出口11和第二入口22相通。
34.其中,摄像头5用于发现结石位置,喷水口20喷射水用于结石润湿;碎石仓1通过碎石组件将结石破碎,并通过第一转向组件实现该机器人的前部的转向;蠕动仓2通过蠕动组件实现机器人的前进或倒退,并通过第二转向组件实现该机器人中部的转向;第一出口11和第二入口22相通,使第一入口18进入的结石经破碎后依次进入第一出口11和第二入口22,并从第二出口32排出。
35.作为可选的实施方式,第一转向组件包括若干第一电磁铁10,第一电磁铁10沿周向均匀设置在碎石仓1靠近第一出口11的一端,第一电磁铁10远离第一出口11的一端通过弹簧9连接有安装板8,安装板可为铁板,安装板8的一端铰接有若干第一安装架6,若干第一安装架6上均滑动设置有连接架7,连接架7的一端铰接在碎石仓1内。
36.其中,第一电磁铁10可吸引安装板8,通过控制第一电磁铁10的磁力强弱可以控制安装板8偏转,进而使安装板8上的第一安装架6随之偏转,从而实现机器人前部的转向,另外,若干第一电磁铁10以同样的磁力吸引安装板8时,安装板8向第一电磁铁10方向移动,若干第一安装架6在连接架7的约束下逐渐撑开,当第一电磁铁10停止吸引时,在弹簧9的作用下,若干第一安装架6又逐渐收回,从而实现第一安装架6前端的变径,进而方便将结石吞入碎石仓1。
37.作为可选的实施方式,碎石组件包括沿轴向固定在碎石仓1内的第二安装架16和设置在若干第一安装架6一端的第一支架19,第一支架19和第二安装架16上滑动设置有齿链15,齿链15可为陶瓷齿链,陶瓷齿链对结石等脆性物质有切割、磨损作用,对管壁组织等
较柔软组织无切割作用;第二安装架16靠近第一出口11的一端设置有空心轴电机12,空心轴电机为微型电机;如图5所示,空心轴电机12的输出端与齿链15啮合。
38.其中,空心轴电机12带动齿链15转动,齿链15在第一支架19和第二安装架16上滑动,从而对结石进行切割并将第一支架19处的结石带往碎石仓1内部。
39.作为可选的实施方式,第二安装架16的两端分别设置有第二支架14和第三支架17,第一支架19和第三支架17为圆弧形支架,第二支架14为圆形支架;第二安装架16、第一支架19、第二支架14和第三支架17上均设置有滑轨33,且第二安装架16沿轴向设置有两列滑轨;第二支架14上设置有不闭合的圆形滑轨,圆形滑轨的两端分别与第二安装架16的两列滑轨相通;第三支架17上设置中断的滑轨,且该滑轨的中断处分别与第二安装架16的两列滑轨相通;其中,齿链15在第二安装架16、第一支架19、第二支架14和第三支架17的滑轨33中滑动,形成闭合的齿链15,在空心轴电机12的带动下,循环地切割。
40.作为可选的实施方式,空心轴电机12的空心轴设置有螺旋形的内壁13,空心轴与第一出口11相通;其中,螺旋形的内壁13有利于将结石碎屑从空心轴的一端带到第一出口11。
41.作为可选的实施方式,蠕动组件包括沿轴向固定在蠕动仓2内的滑杆25,滑杆25上滑动设置有若干滑动板23,滑动板23上均固定有第二电磁铁;相邻两块滑动板23之间设置有第一弹性钢片28,相邻两块滑动板23通过连杆29连接有第二弹性钢片30,第二弹性钢片30的一端穿过蠕动仓2,且第二弹性钢片30的一端设置有蠕动仓2;其中,第二电磁铁产生磁力,若干滑动板23相互靠近,第二电磁铁磁力消失,在第一弹性钢片28的作用下,若干滑动板23远离;滑动板23的靠近和远离带动蠕动仓2开始蠕动,从而实现前进或后退。
42.作为可选的实施方式,滑动板23的中部设置有通孔27,方便结石碎屑的通过。
43.作为可选的实施方式,第一出口11与滑动板23之间、相邻两块滑动板23之间、滑动板23与第二出口32之间均设置有弹性套26;设置弹性套26,为结石碎屑的排出提供通道,使排石碎屑能通过第一出口11、弹性套26和通孔27排到第二出口32。
44.作为可选的实施方式,第二转向组件包括推拉杆31和牵引绳24,推拉杆31固定在第二弹性钢片30上,牵引绳24连接在靠近第二进口的滑动板23上;其中,推拉杆31改变第二弹性钢片30的弯折角度,进而改变蠕动仓2的角度,以实现蠕动仓2中部的转向;牵引绳24拉动靠近第二进口的滑动板23,以实现蠕动仓2前部的转向。
45.作为可选的实施方式,蠕动仓2的一端设置有集线通道4,用于归集摄像头5控制线、喷水口20所需管道、导丝、空心轴电机12控制线、第一电磁铁10控制线、第二电磁铁控制线、推拉杆31和牵引绳24,且有利于医生在人体外进行控制。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。