1.本发明一般涉及烹饪制备设备,并且特别地涉及布置成自动加热和加工由用户预先放置在工作容器中的待烹饪食物的烹饪制备设备。通常,本发明涉及一种家用机器人,该家用机器人包括容器,用户将配料放入该容器中,以便然后用盖关闭容器,并且家用机器人通过加热和加工工作容器的配料而自动制备准备好食用的菜肴。
背景技术:
2.家用机器人在现有技术中是已知的,例如在文献wo2014/026866a1中提出的家用机器人。另一方面,该文献中公开的烹饪制备设备是复杂的,因为该烹饪制备设备包括盖,该盖可以通过锚定在烹饪制备设备的竖直返回程中的纵向轴闭锁在工作容器上。因此,需要设置一种复杂且坚固的底盘(它因此形成鹅颈),这样的底盘成本很高且体积很大。因此,对工作容器的触及受到这些侧向闭锁构件的限制,并且由此限制了使用人体工程学。最后,对闭锁构件的控制需要减速电机的工作,这是漫长的并且会引起用户的等待。
3.此外,文献wo201912208a1公开了一种烹饪制备设备,该烹饪制备设备包括电动装置,该电动装置用于在将盖通过旋转锁定在烹饪容器上之后将盖闭锁在该容器上。在该文献中描述的实施例的缺点在于缺乏用于将烹饪容器也固定在壳体上的解决方案,这会影响使用安全性。例如,必须提供对容器的手动锁定,这增大了成本和使用复杂性。
技术实现要素:
4.本发明的目的是针对上述现有技术的缺点,特别是首先,提供一种结构简单且易于使用、同时即使在容器中有热食物的情况下也能确保用户安全的烹饪制备设备(家用机器人)。
5.为此,本发明的第一方面涉及一种烹饪制备设备,其包括:
6.‑
壳体;
7.‑
容器,所述容器以可移除的方式安装在所述壳体上并且布置成收纳待制备食物;
8.‑
至少一个可移动的工作构件,所述可移动的工作构件设置在所述容器中并且布置成加工收纳在所述容器中的食物;
9.‑
电动机,所述电动机设置在所述壳体中并且布置成使所述可移动的工作构件运动;
10.‑
可移除的盖,所述可移除的盖以可移除的方式安装在关闭位置处,以使所述容器处于关闭状态,在所述关闭状态下,所述容器由所述盖关闭;
11.其中,所述烹饪制备设备包括所述盖的锁定固定装置,所述锁定固定装置包括:
12.·
第一闭锁构件,所述第一闭锁构件可沿第一位移方向在所述盖的非固定位置和所述盖的固定位置之间移动,在所述盖的所述非固定位置处,准许所述盖从关闭位置的打开运动,在所述盖的所述固定位置处,所述第一闭锁构件阻止所述盖从关闭位置的打开运动;
13.·
减速电机,所述减速电机布置成使所述第一闭锁构件沿所述第一位移方向在所述盖的所述非固定位置和所述盖的所述固定位置之间位移;
14.其特征在于:
15.‑
所述锁定固定装置包括第二闭锁构件,所述第二闭锁构件可沿第二位移方向在所述容器的非固定位置和所述容器的固定位置之间移动,在所述容器的所述非固定位置处,准许将安装在所述壳体上的所述容器拆卸,在所述容器的所述固定位置处,所述第二闭锁构件阻止将安装在所述壳体上的所述容器拆卸;以及
16.‑
所述减速电机布置成使所述第二闭锁构件沿所述第二位移方向在所述容器的所述非固定位置和所述容器的所述固定位置之间位移。
17.根据上述实施方式,所述锁定固定装置包括:第一闭锁构件,所述第一闭锁构件布置成将所述盖闭锁在关闭位置;和第二闭锁构件,所述第二闭锁构件布置成闭锁安装在所述设备上的所述容器。因此,同一个减速电机可以同时控制两个闭锁构件,使得所述烹饪制备设备保持简单,但是提供了所述盖的锁定固定和所述容器的锁定。应注意的是,所述闭锁构件由所述减速电机位移,这提供了可以在特定使用条件下进行的先导控制的锁定固定:该系统是灵活的,并且不需要用户干预或操纵:使用的人体工程学不受影响。
18.换句话说,所述锁定固定装置包括传动线或传动链,所述传动线或传动链将所述减速电机连接到所述第一闭锁构件和所述第二闭锁构件,以迫使它们位移。
19.有利地,所述锁定固定装置包括至少一个布置在所述减速电机和所述第二闭锁构件之间的连接装置。这种连接装置允许提供与第二位移方向不同的第一位移方向,而不需要第二减速电机。因此,保持了外形尺寸受到限制,并且增大了设计自由度。
20.有利地,所述连接装置包括角传动装置。
21.有利地,所述连接装置包括凸轮装置。
22.有利地,所述连接装置包括齿轮齿条装置。
23.有利地,所述连接装置包括连杆。
24.有利地,所述减速电机布置成在以下两者之间被先导控制:
25.‑
闲置构造,在所述闲置构造中,所述第一闭锁构件处于所述盖的非固定位置,并且所述第二闭锁构件处于所述容器的非固定位置;和
26.‑
行程结束构造,在所述行程结束构造中,所述第一闭锁构件处于所述盖的固定位置,并且所述第二闭锁构件处于所述容器的固定位置,
27.并且所述减速电机布置成可以停止在中间构造中,在所述中间构造中:
28.‑
所述第一闭锁构件处于所述盖的非固定位置,并且所述第二闭锁构件处于所述容器的固定位置。
29.根据上述实施方式,所述减速电机具有三个停止位置。在所述减速电机的闲置构造中,所述第一闭锁构件或所述第二闭锁构件均未与所述容器或所述盖接合,使得能够进行所有的安装/拆卸操作。在所述减速电机的行程结束构造中,所述第一闭锁构件和所述第二闭锁构件分别与所述盖和所述容器接合,使得不能进行所有的安装/拆卸操作。可以想象,如果在不能拆卸所述盖的情况下设想到溢出或伤害用户的危险,则将所述设备设置在该构造中。另外,规定所述减速电机可以停止在中间构造中,在该中间构造中,仅所述第二闭锁构件与所述容器接合,并且所述第一闭锁构件不与所述盖接合。因此,不能拆卸所述容
器,但如果需要,可以取下所述盖。可以想象,如果根据使用条件,即使取下所述盖也没有识别出溢出或伤害用户的任何危险,则将所述设备设置在该构造中。
30.有利地,所述烹饪制备设备包括在所述减速电机和所述第一闭锁构件的接合部分之间的传动装置,所述接合部分布置成接合到所述盖的配合接合模中,并且:
31.‑
在所述传动装置处或在所述第一闭锁构件的所述接合部分和所述盖的所述配合接合模之间设置有预定间隙;
32.‑
由所述减速电机在所述闲置构造和所述中间构造之间施加的所述第一闭锁构件的行程小于或等于所述预定间隙。根据该实施方式,所述预定间隙设置在所述传动装置处或在所述第一闭锁构件的所述接合部分和所述盖的所述配合接合模之间,但不在所述减速电机和所述第二闭锁构件之间。因此,所述减速电机在闲置构造和中间构造之间的行程使所述第二闭锁构件朝所述容器的固定位置位移,并且所述预定间隙被填充,使得所述第一闭锁构件保持在所述盖的非固定位置。然后,在中间构造中,填充所述预定间隙,所述减速电机从中间构造到行程结束构造的行程引起所述第一闭锁构件移动到所述盖的固定位置,所述第二闭锁构件保持在所述容器的固定位置。
33.有利地,所述容器包括手柄,并且:
34.‑
当所述第一闭锁构件占据所述盖的所述固定位置时,所述第一闭锁构件从所述手柄延伸出;和/或
35.‑
当所述第二闭锁构件占据所述容器的所述固定位置时,所述第二闭锁构件从所述壳体延伸出。
36.所述锁定固定装置部分地容置在所述手柄中,这允许将所述锁定固定装置对用户隐藏。
37.有利地,所述锁定固定装置包括杆,所述杆承载所述第一闭锁构件并且布置成由所述减速电机根据在所述盖的所述固定位置和所述盖的所述非固定位置之间的平移运动而位移,优选地根据滑动连接而位移。
38.有利地,所述锁定固定装置包括与所述减速电机接合以使所述杆位移的齿条。
39.有利地,所述连接装置耦合到所述齿条。该实施方式允许提供一种紧凑的装置,该装置具有尽可能靠近所述减速电机的所述连接装置。
40.有利地,所述容器承载侧罩,所述侧罩从所述容器的下部分延伸到上部分,并且所述杆主要容置在所述容器和所述侧罩之间。
41.有利地,所述锁定固定装置包括:
42.‑
第一弹性构件,例如弹簧,所述第一弹性构件布置成将所述第一闭锁构件从所述盖的所述固定位置推动到所述盖的所述非固定位置;和/或
43.‑
第二弹性构件,例如弹簧,所述第二弹性构件布置成将所述第二闭锁构件从所述容器的所述固定位置推动到所述容器的所述非固定位置。
44.有利地,所述第一位移方向不同于所述第二位移方向,并且优选地,所述第一位移方向包括在第一平面中,所述第一平面相对于包括所述第二位移方向的第二平面成90
°±
15
°
定位。上述实施方式允许所述盖和所述容器的锁定固定,即使所述盖和所述容器没有相似的安装方向也是如此。
45.有利地,所述烹饪制备设备包括所述盖的锁定装置,所述锁定装置布置成将所述
盖锁定在关闭位置,并且布置成被手动控制。
46.有利地,所述盖的所述锁定装置包括卡口型接口。
47.有利地,所述烹饪制备设备包括所述盖的锁定装置,所述锁定装置布置成将安装在所述壳体上的所述容器锁定在所述壳体上,并且布置成被手动控制。
48.有利地,所述容器的所述锁定装置包括:
49.‑
至少一个锁定凸耳,所述至少一个锁定凸耳布置成与配合模接合,以便将安装在所述壳体上的所述容器锁定在所述壳体上;
50.‑
弹性锁定构件,所述弹性锁定构件布置成保持与所述配合模接合的锁定凸耳;
51.‑
至少解锁杠杆,所述解锁杠杆布置成被手动控制,以便将所述锁定凸耳与所述配合模脱离。
52.有利地,所述容器布置成沿所述容器的安装方向,优选地沿所述容器的轴向方向平移地安装在所述壳体上,并且所述第二闭锁构件的所述第二位移方向垂直于所述容器的安装方向。所述闭锁是有效的。
53.有利地,所述盖布置成沿所述盖的安装旋转轴线,优选地平行于所述容器的轴向方向可旋转地安装在所述容器上,并且所述第一闭锁构件的所述第一位移方向平行于所述盖的安装旋转轴线。
54.有利地,所述减速电机布置在所述壳体中,所述减速电机包括控制臂,并且所述控制臂包括至少一个行程结束挡块,所述行程结束挡块设置成与所述壳体抵接,以便限定所述第一闭锁构件的所述盖的所述非固定位置和/或所述第一闭锁构件的所述盖的所述固定位置。
55.有利地,所述减速电机布置成将所述第一闭锁构件从所述盖的所述固定位置位移到所述盖的所述非固定位置。
56.有利地,所述烹饪制备设备包括加热装置,所述加热装置布置成向收纳在所述容器中的食物提供烹饪热。
附图说明
57.通过阅读以下通过非限制性示例给出并通过附图示出的本发明的两个实施方式的详细描述,本发明的其他特征和优点将变得更加清楚,在附图中:
58.图1示出了根据本发明的烹饪制备设备的第一实施方式的分解立体图,该烹饪制备设备尤其包括壳体、容器和盖;
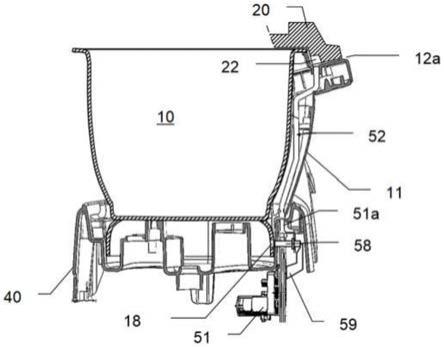
59.图2示出了图1的设备在竖直平面上的剖面,其中容器安装在壳体上并且盖关闭容器;
60.图3示出了图2的剖面,其中第一闭锁构件与盖接合,并且第二闭锁构件与容器接合;
61.图4a示出了布置成使第一闭锁构件和第二闭锁构件位移的减速电机的立体图;
62.图4b示出了图4a的减速电机的另一立体图;
63.图5以立体图示出了图1的烹饪制备设备的局部剖面;
64.图6示出了图4b的减速电机的一个替代实施方式,以提供本发明的第二实施方式;
65.图7示出了根据图2的剖面的第二实施方式,其中图6的减速电机处于闲置构造中;
66.图8示出了图7的剖面的第二实施方式,其中图6的减速电机处于中间构造中,其中仅第二闭锁构件与容器接合;
67.图9示出了图7的剖面的第二实施方式,其中图6的减速电机处于行程结束构造中,其中第一闭锁构件与盖接合,并且第二闭锁构件与容器接合。
具体实施方式
68.第一实施方式
69.图1示出了具有壳体40的烹饪制备设备的第一实施方式,该壳体40可移除地收纳容器10,该容器10可以包含可移动的工作构件30并且可以由盖20关闭。容器10在此可以根据轴向移动安装在壳体40上。可移动的工作构件30,这里是切割工具,放置在容器10中,然后与位于壳体40中的电动机耦合,以便一旦用盖20关闭容器10,就被驱动旋转。
70.容器10具有两个侧向延伸部11,该两个侧向延伸部11沿容器10上升,并且该两个侧向延伸部11终止于在容器10的上部分处的两个手柄12,并且各自包括配置在上表面12a上的狭槽13。盖20设置成随着旋转运动(设置有枢转连接件)安装在容器10上,以便将盖20的凸形部分接合到狭槽13中,从解锁位置(盖20放置在容器10上)转移到锁定的关闭位置,在该锁定的封闭位置处,盖20处于烹饪制备设备上的最终位置。该锁定系统例如是卡口锁定。
71.换句话说,处于解锁位置的盖20关闭容器10,并且可以从容器10上自由地取下,但是一旦盖20位移/枢转到锁定关闭位置,盖20就不再能将从容器10上提起,这当可移动的工作构件30在容器10中旋转时提供了使用安全性。上述的卡口式锁定装置可以是弹性的,也就是说,用户通过升高盖20而使盖20通过“凹口”,使得卡口式锁定装置的柔性凸耳对使用时的向后返回形成障碍。当制备结束时,用户通过沿相反方向转动盖20来解锁卡口式锁定装置,迫使其再次通过“凹口”,并且可以通过结束使盖20枢转来移除盖20。
72.烹饪制备设备还可以包括用于加热和/或烹饪待制备食物的加热装置,特别是布置在壳体40中的感应加热装置,或者放置在壳体40中、壳体40上、容器10下方、容器10周围或容器10中的发热电阻。
73.图1的设备包括在壳体40的前部分中的控制面板44,用于允许用户选择烹饪动作(通常是制备操作或烹饪温度)或完整的烹饪食谱(一系列烹饪动作随时间的流逝而展现)。
74.烹饪制备设备可以包括(存在传感器的)检测装置,这些检测装置指示容器10就位,并且在开始制备之前通过加热和/或加工待制备食物来指示盖20合适就位。
75.通常,在制备时,可以以可变或恒定的方式分阶段地将可移动的工作构件30的旋转速度施加在从0到300转/分钟(300min
‑1)的速度范围内。位于壳体40中的电动机有利地与减速器相关联。加热装置可以选择成将例如可达130℃的温度施加给待制备食物。
76.图2示出了沿图1的竖直平面a
‑
a的剖面,以示出锁定固定装置,这些锁定固定装置尤其包括:
77.‑
杆52,所述杆52容置在容器10的侧向延伸部11中的一个中,并以滑动连接的方式安装;
78.‑
第一闭锁构件53,所述第一闭锁构件53由杆52承载并且部分地容置在手柄12中,并且在图2中,第一闭锁构件53与上表面12a齐平;
79.‑
第二闭锁构件58,所述第二闭锁构件58容置在壳体40中,以滑动连接的方式安装,并且在该图2中,第二闭锁构件58与容器10的孔18相对;
80.‑
传动构件,这里是凸轮59,该凸轮59布置成与跟孔18相对的第二闭锁构件58相对;
81.‑
控制臂51a,该控制臂51a承载凸轮59,并且该控制臂51a的上端部与壳体40的壁齐平,以与杆52的下部分直接相对并且几乎与杆52的下部分接触;
82.‑
减速电机51(在图4a和图4b中也可见),该减速电机51容置在壳体40的下部分中,在容器10下方;
83.‑
齿条51b(在图4a和图4b中可见),该齿条51b与减速电机51接合并且耦合到控制臂51a,以便当减速电机51被先导控制时使控制臂51a位移。
84.图4a和图4b详细示出了锁定固定装置在减速电机51处的布置。与减速电机51接合的齿条51b与控制臂51a连成一体,因此控制臂51a可以平移位移。凸轮59搭载在控制臂5a上,使得凸轮59跟随控制臂51a的运动。因此,与凸轮59的凸轮轨道59a接触的第二闭锁构件58可以沿垂直于控制臂5a的位移方向的方向(在竖直平面内)位移。
85.未示出的弹簧设置成将第二闭锁构件58不断地推抵凸轮轨道59a并将第二闭锁构件58带回到容器10的未固定位置。回到图2,未示出的弹簧还设置成将杆52不断地推抵控制臂5a并因此将第一闭锁构件53带回到盖20的非固定位置。
86.图5示出了不具有容器10的壳体40的局部剖面,以示出壳体40中的孔,第二闭锁构件58和控制臂51a从这些孔伸出。
87.因此,减速电机51布置成使第一闭锁构件53和第二闭锁构件58位移。为此,可以在闲置构造(图2)和行程结束构造(图3)之间对减速电机51进行先导控制。
88.关于第一闭锁构件53,该第一闭锁构件53可沿第一位移方向(竖直方向,杆52的竖直方向)在盖20的非固定位置和盖20的固定位置之间移动,在盖20的该非固定位置处,准许盖20从关闭位置的打开运动,在盖20的该固定位置处,第一闭锁构件53阻止盖20从关闭位置的打开运动。
89.盖20包括配合接合模22,该配合接合模22用于当第一闭锁构件53处于盖20的固定位置时容纳第一闭锁构件53的端部(接合部分),以闭锁盖20的解锁运动。
90.关于第二闭锁构件58,该第二闭锁构件58可在凸轮59的作用下沿第二位移方向(图2中的水平方向)在容器10的非固定位置和容器10的固定位置之间移动,在容器10的该非固定位置处,准许将安装在壳体40上的容器10拆卸,在容器10的该固定位置处,第二闭锁构件58阻止将安装在壳体40上的容器10拆卸。举例来说,第二闭锁构件58以滑动连接或滑动枢转连接的方式安装在壳体40上。
91.容器10包括孔18,该孔18用于当第二闭锁构件58处于容器10的固定位置时容纳第二闭锁构件58的端部(接合部分),以闭锁拆卸/解锁运动。
92.因此,图2示出了烹饪制备设备,其中第一闭锁构件53处于盖20的非固定位置,并且第二闭锁构件58处于容器10的非固定位置。因此,容器10和盖20可以由用户自由地安装或拆卸,因为任何运动都不会由第一闭锁构件53或第二闭锁构件58阻止,减速电机51已经被先导控制成处于闲置构造中。
93.图3示出了烹饪制备设备,其中第一闭锁构件53处于盖20的固定位置,并且第二闭
锁构件58处于容器10的固定位置。实际上,减速电机51已经被先导控制成进入行程结束构造中,使得减速电机51已经使齿条5lb、控制臂5a和杆52根据平移向上位移了距离d,使得:
94.‑
搭载在控制臂5la上的凸轮59已经将第二闭锁构件58水平地推到容器10的固定位置,以进入容器10的孔18中;
95.‑
杆52已经使第一闭锁构件53位移到盖20的固定位置,以进入盖20的配合接合模22中。
96.因此,容器10和盖20不能再由用户自由地拆卸/解锁,因为这些拆卸/解锁运动由第一闭锁构件53和第二闭锁构件58阻止,减速电机51然后处于行程结束构造中。
97.当使用设备时,一旦已经安装了容器10并且将盖20安装并锁定在工作工具30和待制备食物上方,则用户可以使设备投入工作。因此,为使该工作安全,烹饪制备设备先导控制减速电机51以同时锁定容器10并固定盖20的锁定,如上所述。
98.应当注意的是,无论在容器10的锁定方面还是盖20的锁定固定,仅需一个减速电机来进行烹饪制备设备的这种固定。角度传动装置,即凸轮59,允许对第一闭锁构件53和第二闭锁构件58施加沿不同方向的运动,从而为容器10和盖20提供有效和合适的固定,尽管它们在烹饪制备设备上的安装特殊性,也是如此。
99.实际上,当解锁盖20时,第一闭锁构件53的运动垂直于配合接合模22的位移,并且当拆卸容器10时,第二闭锁构件58的运动也垂直于孔18的运动。因此,容器10和盖20的闭锁是有效的。
100.所示的示例示出了凸轮59,该凸轮59用于在第一闭锁构件53和第二闭锁构件58之间提供这两个不同的位移方向。然而,可以设想连杆、双齿条等。
101.第二实施方式
102.图6示出了第二实施方式,在该第二实施方式中规定了可以将容器10的锁定与盖20的锁定固定分开。实际上,会有利的是允许在某些条件下可以解锁和拆卸盖20,而无需解锁/拆卸容器10,例如以添加配料。然而,在某些情况下,必须确保的是,例如在有沸腾/溢出危险的情况下,盖20不能解锁/拆卸。因此,会是有利的是,在某些条件下仅允许盖20的解锁/拆卸。
103.为此,与图4a和图4b的第一实施方式相比,图6示出了在减速电机151执行的锁定固定装置的一些修改。特别是:
104.‑
齿条15lb比第一实施方式中的更长;
105.‑
凸轮159的凸轮轨道155a具有比第一实施方式中的更长的行程结束部分;
106.‑
控制臂151a比第一实施方式中的更短。
107.‑
减速电机151设置成可以从闲置构造被先导控制到行程结束构造,而且还可以停止在中间构造中。
108.如上所述,控制臂151a比第一实施方式的控制臂51a更短。如图7所示,在减速电机151处于闲置构造中的情况下,在控制臂151a和杆52之间存在预定间隙jp。在图7中,在减速电机151处于闲置构造中的情况下,第一闭锁构件53处于盖20的非固定位置,并且第二闭锁构件58处于容器10的非固定位置。因此,容器10和盖20可以由用户自由地安装或拆卸,因为任何运动都不会由第一闭锁构件53或第二闭锁构件58阻止。
109.图8示出了图7的烹饪制备设备,其中减速电机151已经被先导控制成进入中间构
造中。控制臂15a已经向上位移了小于或等于预定间隙jp的行程,并且搭载在控制臂151a上的凸轮159将第二闭锁构件58推到容器10的固定位置。然而,控制臂151a没有使杆52位移,使得第一闭锁构件53保持在盖20的未固定位置。因此,容器10不能再由用户自由地拆卸,因为这种运动由第二闭锁构件58阻止。不过,盖20可以始终由用户自由地安装或拆卸,因为任何运动都不会由第一闭锁构件58阻止。
110.图9示出了图7的烹饪制备设备,其中减速电机151已经被先导控制成进入行程结束构造中。这次,控制臂151a已经再次位移了大于预定间隙jp的总行程。搭载在控制臂15a上的凸轮159继续将第二闭锁构件58推到容器10的固定位置。然而,控制臂15a已经使杆52位移,使得第一闭锁构件53现在处于盖20的固定位置(参见距离d)。因此,容器10和盖20不能再由用户自由地拆卸,因为这种运动由第一闭锁构件53和第二闭锁构件58阻止。
111.总而言之,图9示出了在安全构造中的烹饪制备设备的锁定固定装置,在该安全构造中,盖20和容器10都不能被拆卸,图8示出了处于部分固定构造中的烹饪制备设备的锁定固定装置,在该部分固定构造中,仅盖20可以被拆卸,并且图7示出了处于自由拆卸构造中的烹饪制备设备的锁定固定装置,在该自由拆卸构造中,准许任何拆卸。能够在特定条件下,尤其是根据食谱步骤和容器10中的食物状态使烹饪制备设备从一种构造切换到另一种构造。
112.这里提出的解决方案基于减速电机151和第一闭锁构件53之间的传动中的预定间隙jp。然而,可以替代地缩短第一闭锁构件53,以在自由拆卸构造中在第一闭锁构件53和手柄12的上表面12a之间设置间隙。因此,在自由拆卸构造中,第一闭锁构件53从上表面12a明显后退;在部分固定构造中,第一闭锁构件53与上表面12a齐平;在固定构造中,第一闭锁构件53相对于上表面12a突出并且可以与盖20接合。
113.作为非限制性示例,首先可以规定,一旦自动检测到容器10处于升高位置,或在用户确认后,就要求烹饪制备设备的锁定固定装置切换到图8的部分固定构造。
114.作为非限制性示例,然后可以规定,只有在制备循环过程中,可移动的工作构件30的旋转速度大于(或已经大于)预定速度,并且待制备食物的温度大于(或已经大于)预定温度,才要求烹饪制备设备的锁定固定装置处于图9的固定构造中。还可以规定在预定闲置时间延迟期间保持该状态。
115.然后,用户必须等待闲置时间延迟的结束,然后才能打开盖20。如果这两个条件没有同时满足,则锁定固定装置从图9的固定构造切换到图8的中间构造或图7的闲置构造与烹饪制备设备的停止同时进行,并且用户可以立即打开盖20。
116.换句话说,根据该变型例,将盖20闭锁在锁定位置是系统性的,并且如果没有识别出溢出危险,则在烹饪制备设备停止时立即或同时进行解锁;如果识别出溢出危险(超过预定温度和超过预定速度),则延迟解锁。换句话说,锁定固定装置被有条件地去激活。
117.根据该方法的第二变型例,只有在两个条件都被编程时(也就是说,当烹饪制备设备启动时,例如与可移动的工作构件开始移动的同时或甚至之后),但在速度超过预定速度且温度超过预定温度之前,或在该两个条件由烹饪制备设备测量完后(在编程过程中),才可以将盖20闭锁在锁定位置。然后,可以在烹饪制备设备的整个后续使用期间,以及在闲置时间延迟期间(至少五秒钟,并且优选至少八秒或十秒钟),在可移动的工作构件和/或加热构件完全停止之后,将激活的锁定固定装置保持在固定构造中。因此,仅当存在溢出风险时
才不可能打开盖20。
118.换句话说,根据该变型例,仅在规定或测量到在下一循环过程中超过预定速度和预定温度,才在启动时或使用期间将锁定固定装置切换到图9的固定构造,并且即使在烹饪制备设备完全停止之后,也能在短时间内保持闭锁。可以在控制面板44上进行设置以告知用户是否可以打开。换句话说,锁定固定装置被有条件地激活。
119.因此,烹饪制备设备包括控制单元和用于测量或获取温度的装置以及用于测量或获取可移动的工作构件30的速度的装置。
120.可以使用加热装置的温度、容器10的温度或位于容器10中的待制备食物的温度。预定温度可以是50℃或优选60℃。
121.关于可移动的工作构件30的速度,可以选择考虑的是,一旦选择或测量了速度范围(例如,多个预编程速度级的最后级),或者一旦选择或测量的速度超过特定值,例如160转/分钟或更优选为250转/分钟,就必须将锁定固定装置切换到固定构造(如果超过了预定温度)。
122.因此,通过在闲置时间延迟期间,在停止搅拌和加热食物之后,一旦在超过预定温度的同时速度超过预定速度,就将盖20闭锁在锁定位置,只要存在不适当的溢出和/或沸腾的风险,就不可能打开。
123.然后可以设想将以下施加给锁定固定装置:
124.‑
如果食谱例如需要添加配料或调味料,则切换到部分固定构造,以便仅取下盖20;
125.‑
如果食谱完成,则切换到自由拆卸构造,以便还拆卸容器10(或容器10
‑
盖20组件)。
126.将理解的是,在不脱离本发明的范围的情况下,可以对本说明书中描述的本发明的各种实施方式做出对本领域技术人员显而易见的各种修改和/或改进。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。