1.本发明涉及烹饪机器人的领域,并且更具体地涉及用于将碗锁定在烹饪机器人的电动基座上的锁定系统的领域。
背景技术:
2.以已知的方式,烹饪机器人是常规包括至少一个电动基座和安装在电动基座上的碗的家电设备。
3.通常,旋转式加工工具定位在碗的底部。旋转式加工工具可以允许实现切碎、捏合、混合或乳化工作。
4.根据烹饪机器人的型号,可以设置多种类型的旋转式加工工具来实现诸如乳化、磨碎制备、混合等的特定工作。
5.另外,如果需要,机器人可以包括使得能够加热碗的加热构件,例如炉灶上的有柄平底锅。
6.烹饪机器人的一大优点是其功率和其切碎速度,这例如允许从各种谷粒制作面粉。
7.由于旋转式加工工具可以产生速度和扭矩,因而需要在烹饪机器人的工作期间将碗牢固地固定到烹饪机器人的电动基座上。
8.另一方面,可以方便地从烹饪机器人的电动基座上取下碗以例如将其排空或将其清洁。
9.因此,大多数烹饪机器人都具有锁定系统,该锁定系统允许在烹饪机器人的电动基座上交替地将碗锁定或解锁。
10.将碗通过卡口锁定在电动基座上允许这种保持,但具有的缺点是使用碗在电动基座上的旋转来确保碗的保持。这样的实施例与通过沿竖直方向的简单平移运动将碗放置在电动基座上不兼容。这种运动允许改善设备的人体工程学并且还允许简化其结构,特别是当碗包括由电动基座经由连接器供电的加热元件时。还已知多种锁定系统,其一方面实现盖相对于碗的锁定,另一方面实现碗在电动基座上的闭锁。实际上,当旋转式加工工具高速旋转和/或当旋转式加工工具锋利时,期望的是将盖锁定在碗上并且当旋转式加工工具运动时不能取下盖。另外,这允许通过禁止在烹饪机器人的工作期间任意取下碗而改善设备的安全性。
11.然而,在某些应用中,这种构造是不令人满意的,因为期望的是可以将碗在电动基座上的锁定与盖在碗上的存在解除相关。实际上,在某些应用中,期望的是可以不使用盖而使用锁定在电动基座上的碗,例如用于不使用旋转式加工工具的操作,例如在加热式烹饪机器人中的烹饪操作,或者完全仅用于检查食物、搅拌食物或添加配料。另一方面,期望的是具有比现有系统更简单且更坚固的锁定系统。
技术实现要素:
12.根据第一方面,本发明提出了一种用于将烹饪机器人的碗锁定在烹饪机器人的电动基座上的锁定系统,所述电动基座包括旨在以可移除的方式收纳所述碗的收纳空间,所述锁定系统包括布置在所述碗上的第一锁定构件和布置在所述电动基座上的第二锁定构件。所述第一锁定构件和所述第二锁定构件是细长的并且设置成彼此插入。所述第一锁定构件从所述碗的下表面沿与所述碗状物在所述电动基座上放置的方向相对应的轴向方向延伸。所述第二锁定构件绕所述轴向方向可旋转地安装在所述碗的所述收纳空间上,并且构造成在锁定位置和解锁位置之间枢转,在所述锁定位置处,所述第一锁定构件和所述第二锁定构件彼此插入并且被闭锁沿所述轴向方向相对于彼此平移,在所述解锁位置处,所述第一锁定构件和所述第二锁定构件沿所述轴向方向相对于彼此自由平移,以允许将所述碗放置在所述电动基座上或从所述电动基座上取下所述碗。
13.因此,根据本发明的锁定系统允许将碗的底部锁定到电动基座上。该设置允许确保碗的最佳锁定,同时如果期望的话允许从碗上取下盖。换句话说,根据本发明的锁定系统允许在不将盖锁定在碗上的情况下锁定碗。
14.所述第一锁定构件或所述第二锁定构件可以是形成凸形元件的销,并且所述第一锁定构件和所述第二锁定构件中的另一个可以是形成凹形元件的管,所述凹形元件具有与所述凸形元件互补的形状,用于将所述凸形元件插入到所述凹形元件中。
15.所述第一锁定构件和所述第二锁定构件中的一个可以具有至少一个凹槽,并且所述第一锁定构件和所述第二锁定构件中的另一个可以具有至少一个卡口,所述至少一个卡口适于在所述至少一个凹槽中滑动。
16.所述第一锁定构件和所述第二锁定构件中的一个可以具有至少一个径向凹槽和至少一个轴向凹槽,并且所述第一锁定构件和所述第二锁定构件中的另一个可以具有至少一个卡口,所述至少一个卡口适于在所述至少一个轴向凹槽和所述至少一个径向凹槽中滑动,使得在解锁位置处,所述至少一个卡口可以在所述至少一个轴向凹槽中滑动,并且在锁定位置处,所述至少一个卡口定位在所述至少一个径向凹槽中并且不能在所述至少一个轴向凹槽中滑动。
17.所述销可以具有所述至少一个径向凹槽和所述至少一个轴向凹槽,并且所述管可以具有所述至少一个卡口。
18.所述销可以包括两个径向相对的轴向凹槽,并且所述管可以具有两个径向相对的卡口。
19.所述锁定系统可以包括电动机构件,所述电动机构件适于使所述第二锁定构件在所述锁定位置和所述解锁位置之间枢转。
20.所述电动机构件可以布置在所述电动基座中。
21.所述第一锁定构件可以是所述销,并且所述第二锁定构件可以是所述管。
22.所述第一锁定构件可以包括用于固定在所述碗上的固定装置,并且所述第二锁定构件包括用于固定在所述电动基座上的固定装置,用于将所述锁定系统固定在预先存在的烹饪机器人和碗上。
23.当所述碗就位在所述电动基座上时,所述下表面可以容置在所述电动基座的所述收纳空间中。
24.根据另一方面,本发明涉及一种烹饪机器人的碗,其旨在组装在烹饪机器人的电动基座上,并且包括属于根据本发明的锁定系统的第一锁定构件。
25.根据另一方面,本发明涉及一种烹饪机器人的电动基座,其包括烹饪机器人的碗的收纳空间,在所述收纳空间中布置有属于根据本发明的锁定系统的第二锁定构件。
26.所述电动基座可以包括适于将旋转式加工工具驱动旋转的主电动机,并且可以包括根据本发明的锁定系统的电动机构件。
27.根据另一方面,本发明涉及一种烹饪机器人的组件,其包括根据本发明的电动基座和根据本发明的碗。
附图说明
28.本发明的其他特征、目的和优点将从以下仅是示例性而不是限制性的并且应参照附图来阅读的描述中显现出来,在附图中:
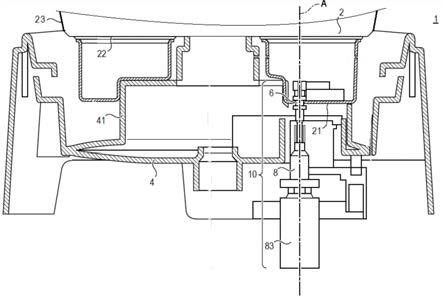
29.图1是由根据本发明的锁定系统锁定在电动基座上的碗的局部剖视图;
30.图2是具有根据本发明的第一锁定构件的碗的底壁的局部立体图;
31.图3是根据本发明的第一锁定构件的放大立体图;
32.图4是根据本发明的第二锁定构件的立体图;
33.图5是根据本发明的锁定系统的剖视图。
具体实施方式
34.根据第一方面,本发明提出了一种用于将烹饪机器人1的碗2锁定在烹饪机器人1的电动基座4上的锁定系统10。
35.锁定系统10主要包括布置在碗2上的第一锁定构件6和可旋转移动地安装在电动基座4上的第二锁定构件8。图1示出了锁定系统10的一个实施例。在图1中,局部示出了碗2和电动基座4。
36.电动基座
37.通常,电动基座4包括旨在以可移除的方式收纳碗2的收纳空间41。收纳空间41包括第二锁定构件8,该第二锁定构件8的结构将在下面说明。收纳空间41可以特别具有至少一个适于收纳碗2的下肋的上凹口和/或至少一个适于嵌入碗2的下凹口中的上突起。当碗2定位在收纳空间41中时,这种上凹口和上突起组件允许避免碗2的任何径向平移。
38.如还将在下面说明的那样,电动基座4还包括一个或多个电动机构件。优选地,电动基座4包括主电动机,该主电动机构造成将布置在碗2中的旋转式加工工具驱动旋转。旋转式加工工具可以例如是搅拌器、打蛋器、螺旋器或任何其他适于烹饪制备的旋转式加工工具。
39.碗
40.如上所述,锁定系统10适于锁定碗2和电动基座4之间的连接件。更确切地,锁定系统10的第一锁定构件6固定在碗2上。碗2具有底壁22和侧壁23,该侧壁23具有界定上开口的上边缘。碗2可以具有圆柱形或圆柱
‑
圆锥形的形状。通常,碗2可以特别地由诸如不锈钢之类的金属制成。
41.根据一个实施方式,碗2可以包括电加热装置。电加热装置可以特别地布置在碗2
的下部分中。如果需要,可以借助电连接器或电源销从电动基座4为电加热装置供电。
42.根据另一实施方式,碗2可以构造成由布置在电动基座4中的加热装置加热。如果需要,加热装置可以是感应式加热装置。
43.底壁22可以包括旋转式加工工具的收纳装置。通常,这些收纳装置可以是适于接合在旋转式加工工具的凹形元件中的突起,或者是适于容纳旋转式加工工具的突起的凹口。根据一个实施方式,这些收纳装置可以包括由驱动装置支撑的驱动器,该驱动装置包括驱动轴,该驱动轴通过引导装置固定在碗2的底部上,这些引导装置既确保了驱动轴垂直于碗2的底壁22的自由旋转,又确保了旋转式连接件的密封,驱动轴穿过碗2的底壁22并且包括配备有扁平件的上端部和下端部,在该上端部上接合有驱动器,当碗2正确放置在电动基座上4时,该下端部耦合到与主电动机一体旋转的元件。
44.碗2的侧壁23可以具有允许用户抓握碗2的手柄。最常见地,手柄由允许手柄隔热的塑料材料制成,使得用户可以握住碗2而不会被灼伤。有利地,侧壁23的上部可以具有形成倾倒口的返回部。
45.另外,根据这里提出的示例,碗2具有下表面21,当碗2就位在电动基座4上时,该下表面21在电动基座4的收纳空间41中延伸。碗2的下部分具有用于定位在电动基座4上的定位装置,这些定位装置构造成闭锁碗2围绕与碗2在电动基座4上放置的方向相对应的轴向方向a旋转,并且用于闭锁碗2相对于电动基座4横向平移。这些定位装置可以包括适于接合在电动基座4的凹口中的圆形肋和适于收纳电动基座4的突起的圆形凹口。碗2的下部分可以与底壁22一起界定容置加热元件的隔室。
46.锁定系统
47.锁定系统10主要包括布置在碗2上的第一锁定构件6和可旋转移动地安装在电动基座4上的第二锁定构件8。如下所述,锁定系统10允许当碗2就位在电动基座4上时锁定碗2相对于电动基座4平移,以阻止从电动基座4上取下碗2。
48.有利地,第一锁定构件6和第二锁定构件8是细长的并且设置成彼此插入。
49.第一锁定构件
50.第一锁定构件6从碗2的底部的下表面21沿与碗2在电动基座4上放置的方向相对应的轴向方向a延伸。
51.优选地,根据这里提出的示例,第一锁定构件6是销61,如在图2和图3中可以看到的那样。销61是指可以是空心或实心的杆。优选地,销61是实心杆,也就是说是一件式的。根据此处给出的示例,销61是金属销61,这保证了锁定系统10的强度。然而,根据其他示例,销61可以由具有令人满意的机械特性的塑料或复合材料制成,以保证锁定系统10的强度。销61具有两端部,即固定到碗2的下表面21的固定端部和自由端部。
52.从图中可以看出,销61具有多个凹槽62。更确切地,根据这里提出的实施方式,销61具有两个轴向凹槽622。轴向凹槽622在销61的周边上基本相对。轴向是指轴向凹槽622沿平行于轴向方向a的轴线延伸。这两个轴向凹槽622各自一方面通到销61的自由端部。另一方面,这两个轴向凹槽622各自通向径向凹槽621。根据这里提出的示例,销61仅包括单个径向凹槽621。该径向凹槽是圆形的并且途经销61的整个周边。因此,总而言之,根据这里提出的示例,销61包括两个轴向凹槽622和一个径向凹槽621。
53.第二锁定构件
54.根据一般描述,第二锁定构件8围绕轴向方向a可旋转移动地安装在碗2的收纳空间41上并且构造成在锁定位置和解锁位置之间枢转,在该锁定位置处,第一锁定构件6和第二锁定构件8彼此插入并且被闭锁沿轴向方向a相对于彼此平移,在该解锁位置处,第一锁定构件6和第二锁定构件8沿轴向方向a相对于彼此自由平移,以允许将碗2放置在电动基座4上或从电动基座4上取下碗2。如果需要,第二锁定构件8可以至少部分地布置在保护罩下方。保护罩可以具有上开口,该上开口构造成允许插入第一锁定构件6和/或使第二锁定构件8的上部分可见。
55.优选地,第二锁定构件8是管81,如图4所示。管81可以具有两个径向卡口82。卡口82是指适于在销61的轴向凹槽622和径向凹槽621中滑动的凸部,即突起。优选地,卡口82在径向上相对。
56.如上所述,第二锁定构件8适于在锁定位置和解锁位置之间枢转。根据这里提出的示例,在解锁位置处,卡口82可以在轴向凹槽622中滑动并且可以通向径向凹槽621。第二锁定构件8可以绕轴向方向a从解锁位置枢转到锁定位置。在锁定位置处,卡口82存在于径向凹槽621中并且被闭锁在该径向凹槽621中。换句话说,在解锁位置处,销61可以相对于管81轴向平移位移,并且卡口82各自在轴向凹槽622中滑动。在锁定位置处,销61接合在管81中,并且卡口82定位在径向凹槽621中。管81的旋转使卡口82相对于轴向凹槽622偏移。因此,卡口82在径向凹槽621中被闭锁平移。管81的另一旋转允许返回到解锁位置,也就是说使卡口82与轴向凹槽622对准。
57.该锁定系统10是特别有利的,因为该锁定系统10允许以安全和简单的方式闭锁碗2相对于电动基座4平移。实际上,通过开槽的销61和卡口82的锁定确保了最佳固定。换句话说,在锁定位置处,除了破坏锁定系统10之外,不可能从电动基座4上取下碗2。另外,该锁定系统10摆脱了碗2的盖和用户。实际上,一旦碗2定位在电动基座4上,该系统就可以自动化。另外,销61的使用是一种特别有利的设置,因为许多碗已经具有销以确保与电动基座4的电连接。因此,根据本发明的锁定系统10可以容易地附加到现有碗上,例如通过用销61替换碗2的电连接销之一,或者通过附加销61。
58.同样,第二锁定构件8可以被附加到预先存在的电动基座4上。这样,第二锁定构件8可以具有用于固定到电动基座4上的固定装置。具体而言,固定装置是指可以允许将第二锁定构件8安装到预先存在的电动基座4上的固定装置。当然,这些固定装置必须保证将第二锁定构件8持久且耐受地固定到电动基座4上。持久且耐受的固定是指耐受振动和耐受销61在管81中的平移应力的嵌固类型的连接。
59.根据一个优选实施方式,第二锁定构件8包括电动机构件83,该电动机构件83允许使管81绕轴向方向a枢转。优选地,该电动机构件83与设置成将旋转式加工工具驱动旋转的主电动机分开。如果期望,电动机构件83可以是电动机;微型电动机;减速电动机;伺服电动机;千斤顶;电磁体。
60.烹饪机器人
61.根据另一方面,本发明涉及一种烹饪机器人1的组件,其包括具有第二锁定构件8的电动基座4和具有第一锁定构件6的碗2。
62.另外,烹饪机器人1的组件包括电源和控制装置,该电源和该控制装置通常布置在电动基座4上。控制装置可以包括屏幕以及用于执行一个或多个工作程序的可选的至少一
个按钮。通常,控制装置可以包括构造成给烹饪机器人1通电的启动按钮。如果需要,控制装置可以具有触摸界面。
63.根据一个实施方式,控制装置可以包括按钮(无论是否与启动按钮分开),该按钮构造成允许启动碗2在电动基座4上的锁定控制。通常,该控制可以耦合到旋转式加工工具的启动控制。在该情况下,烹饪机器人1的控制装置检查碗2在电动基座4上的存在,然后将碗2锁定在电动基座4上,最后启动旋转式加工工具的旋转。
64.根据另一实施例,一旦碗2定位在电动基座4上,控制装置就可以锁定碗2。为此,控制装置可以特别地包括开关,该开关通过将碗2放置在电动基座4上而被致动并且构造成激活碗2的锁定。替代地,控制装置可以特别包括传感器,该传感器构造成当碗2已经放置在电动基座4上时激活碗2的锁定。
65.最常见地,旋转式加工工具的旋转要么通过用户的控制来停止,要么通过计时器来停止,或者通过控制装置的工作程序完成来停止。
66.如果需要,控制装置可以在旋转式加工工具停止时或经过一段时间后自动从电动基座4上解锁碗2。
67.作为替代或作为补充,控制装置可以使用用户控制以允许解锁碗2,以便将碗2从电动基座4上取下。控制是指按下按钮、按钮组合或触摸界面。
68.因此,所提出的锁定系统10允许将碗2锁定在电动基座4上,并且通过将碗2保持在电动基座4上并且通过避免无意中将碗2取下来确保烹饪机器人1的使用。锁定系统10还允许简化碗2的结构,因为第一锁定构件6可以布置在碗2的下表面21下方。碗2可以没有属于锁定系统10的运动部分。当碗2就位在电动基座4上时,用户无法触及锁定系统10,因为当碗2就位在电动基座4上时,碗2的下表面21容置在收纳空间41中。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。