x射线图像生成装置
技术领域
1.本发明涉及一种利用作为透过试样(被摄体)的x射线的波的性质,以高灵敏度观察试样的内部结构的x射线图像生成装置的技术。
背景技术:
2.x射线作为用于透视物体内部的探针,在医用图像诊断、非破坏检查、安全检查等中被广泛利用。x射线透视图像的对比度根据x射线衰减率的不同而不同,强吸收x射线的物体被描绘为x射线的影。越含有原子序数大的元素,x射线吸收能力就越强。相反,对于由原子序数小的元素构成的物质,也可以指出难以产生对比度,这也是以往的x射线透视图像的原理上的缺点。因此,对于生物软体部组织或有机材料等,不能得到充分的灵敏度。
3.另一方面,如果利用作为x射线中的波的性质,则与一般的以往的x射线透视图像相比,能够实现最高约3位的高灵敏度化。以下,将其称为相位对比度x射线摄像法。如果将该技术应用于由几乎不吸收x射线的轻元素构成的物质(生物软体部组织或有机材料等)的观察,则可以进行用现有方法难以进行的检查,因此,期待其实用化。即,相位对比度x射线摄像法用于例如与以往的吸收对比度图像相比提高低吸收性的试样的对比度。
4.在下述专利文献1中,记载了除了图像检测器之外,还具有多色x射线源、x射线干涉仪、射线源格栅(所谓g0格栅)、相位格栅(所谓g1格栅)、解析格栅(所谓g2格栅)的x射线干涉仪装置。在射线源格栅和相位格栅之间配置被摄体。这些格栅成为例如在由作为金的吸收材料构成的多个片帘部件(周期性排列的格栅部件)之间具有多个x射线透过狭缝的结构。根据该技术,能够在使用多色x射线的同时拍摄相位对比度。但是,该x射线干涉仪装置仅在特定的一个方向上提供相位对比度信息。
5.另一方面,在下述专利文献2中记载了具有周期方向不同的多个格栅部分的x射线干涉仪装置。在该技术中,在多个格栅部分分别设置1/n周期偏移(n≥2)的多个区域。然后,通过在被摄体在多个格栅部分的各区域移动期间进行x射线摄像,取得多个方向的相位对比度信息。
6.但是,在该技术中,至少需要8个线检测器,各线检测器需要与各自的格栅部分及区域具有一定的关联地配置。因此,在该技术中,不仅构成要素的数量增加,而且需要多个构成要素间的精密的位置调整。因此,存在实际的制造成本和运用成本增加的问题。
7.另外,在下述非专利文献1中,记载了不需要上述相位格栅的1/n周期偏移的摄像技术。该技术是如下的技术手段:以透过x射线干涉仪生成的莫尔干涉条纹理想地等间隔配置为前提,通过相对于干涉条纹移动被摄体来实现条纹扫描方法。
8.在下述专利文献3中记载了即使在使用不理想的莫尔干涉条纹的情况下,也能够通过使被摄体相对于干涉条纹相对移动来实现条纹扫描法的方法。
9.在下述专利文献4中记载了通过一边移动格栅一边进行动态图像摄影来实现条纹扫描的技术。
10.但是,这些非专利文献1、专利文献3以及专利文献4是提示针对构成要素的复杂化
和精密的位置调整的解决方法的文献,只不过是只能取得一个方向的相位对比度信息的文献。
11.在下述非专利文献2中,记载了使用具备具有一个周期方向的格栅的x射线干涉仪装置,取得多个方向的信息的方法。该装置除了被摄体的移动机构之外,还具有使被摄体相对于格栅旋转的机构,通过同时进行被摄体的移动和摄影,取得多个方向的信息。
12.根据该方法,能够避免构成要素的复杂化和精密的位置调整。但是,在该方法中,由于x射线透过的区域根据被摄体的每个旋转角度而变化,所以不能严格意义上重叠针对某个区域的多个方向上的信息。
13.另外,在该方法中,由于需要使被摄体旋转,所以即使摄像装置的本来的视野为矩形,实质的视野也被限制为以矩形的短轴方向为直径的圆形。
14.进而,在非专利文献3中记载了利用具有一个方向的格栅的x射线干涉仪装置取得多个方向的三维信息的方法。该装置是具有使被摄体的朝向相对于格栅旋转的机构的x射线ct装置,在多个方向上进行以往的条纹扫描法以及基于被摄体旋转的ct。但是,在该技术中,由于视野被格栅或旋转机构等限制,因此,存在被摄体的大小受到限制的问题。
15.现有技术文献
16.专利文献
17.专利文献1:美国专利第7889838号
18.专利文献2:美国专利第9597050号
19.专利文献3:美国专利第10481110号
20.专利文献4:美国专利第10533957号
21.非专利文献
22.非专利文献1:review of scientific instruments 78,043710 2007
23.非专利文献2:appl.phys.lett.112,111902(2018)
24.非专利文献3:scientific reports volume 7,article number:3195(2017)
25.这些现有技术文献通过参照编入到本技术的说明书中。
技术实现要素:
26.本发明是鉴于上述状况而完成的。本发明的目的在于提供一种在大视野且多个方向上的相位对比度信息的取得变得容易的x射线图像生成装置的技术。
27.本发明可以表现为以下项目中记载的发明。
28.(项目1)
29.一种x射线图像生成装置,使用x射线的强度分布图像生成被摄体的x射线图像,其特征在于,
30.具备:射线源、格栅部、检测器和移动机构,
31.所述射线源为向所述格栅部照射x射线的结构,
32.所述格栅部具有构成塔尔博特(talbot)干涉仪的多个格栅,
33.所述检测器构成为,检测通过所述格栅部的所述x射线作为所述强度分布图像,
34.所述移动机构构成为,使所述被摄体在横穿向所述格栅部照射的所述x射线的方向上,相对于所述格栅部相对移动,
35.所述格栅部具有在沿着所述移动机构的移动方向的方向上排列的n个区域,其中,2≤n,
36.属于所述n个区域中的第i个区域的所述多个格栅中的格栅结构的周期方向与属于所述n个区域中的第i 1个区域的所述多个格栅中的格栅结构的周期方向为不同的方向,其中,1≤i≤n
‑
1,
37.所述多个格栅构成为,在所有的所述n个区域生成的莫尔干涉条纹都能够由所述检测器测量其周期性的强度变动,并且在所述移动机构的移动方向上具有至少一个周期以上的强度变动。
38.(项目2)
39.如项目1所述的x射线图像生成装置,其特征在于,
40.所述多个格栅具有构成所述塔尔博特干涉仪的g1格栅和g2格栅,
41.所述g2格栅中的所述n个区域中的周期方向,相对于由所述格栅部的g1格栅生成且具有n个周期方向的自身像,以同样的角度θ旋转配置,由此,生成所述莫尔干涉条纹,其中,θ≠0,
42.(项目3)
43.如项目2所述的x射线图像生成装置,其特征在于,
44.所述角度θ在所有的所述n个区域中满足下述范围:
[0045][0046]
其中,
[0047]
d:g2格栅的格栅周期;
[0048]
l
i
:n个区域中的第i个区域在被摄体的移动方向上的、检测器上的图像检测区域的宽度;
[0049]
ψi:在n个区域中的第i个区域中,由g1格栅生成的自身像的周期方向的角度(将与被摄体移动方向平行的方向设为0
°
);
[0050]
p:检测器的像素尺寸。
[0051]
(项目4)
[0052]
所述图像检测区域的宽度l
i
在所有的所述n个区域中满足下述范围:
[0053][0054]
其中,
[0055]
l:关于所有n个区域的在被摄体的移动方向上的、检测器上的图像检测区域的总宽度。
[0056]
(项目5)
[0057]
如项目1~4中任一项所述的x射线图像生成装置,其特征在于,
[0058]
所述多个格栅都是在一片基板上形成有成为不同的周期方向的所述格栅结构的格栅。
[0059]
(项目6)
[0060]
如项目1~5中任一项所述的x射线图像生成装置,其特征在于,
[0061]
所述多个格栅还具备构成塔尔博特
‑
劳厄(talbot
‑
lau)干涉仪的g0格栅。
[0062]
(项目7)
[0063]
如项目1~6中任一项所述的x射线图像生成装置,其特征在于,
[0064]
还具备处理部,
[0065]
所述处理部具备x射线图像生成部和伪像处理部,
[0066]
所述x射线图像生成部使用由所述检测器取得的多个强度分布图像生成x射线图像,
[0067]
所述伪像处理部使用所述x射线图像中没有被摄体的区域中的roi图像,去除所述x射线图像中的伪像。
[0068]
根据本发明,能够提供一种容易取得在大视野的同时多个方向上的相位对比度信息的技术。
附图说明
[0069]
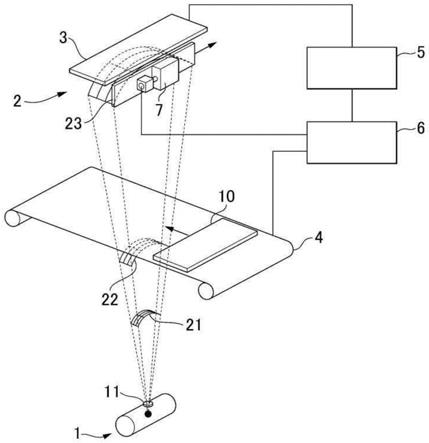
图1是表示本发明的一实施方式的x射线图像生成装置的概略结构的说明图。
[0070]
图2是从沿着包含被摄体的输送方向和x射线的放射方向的面的切断面观察图1的状态下的主要部分的概略说明图。
[0071]
图3是用于说明构成图1的装置中使用的格栅部的1片格栅的概略结构的立体图。
[0072]
图4a是用于说明格栅的旋转状态的说明图。
[0073]
图4b是用于说明由g1格栅生成的自身像的说明图。
[0074]
图5是用于说明由检测器检测的、由格栅部产生的莫尔条纹的一例的说明图。
[0075]
图6是在图2中为了参考而追加了格栅的放大图和莫尔条纹的放大图的说明图。
[0076]
图7是用于说明处理部的概要的框图。
[0077]
图8是用于说明使用了图1的装置的x射线图像生成方法的一例的流程图。
[0078]
图9是用于说明实施例1的伪像去除方法的说明图,(a)表示修正前的x射线图像的一例,(b)表示修正后的x射线图像的一例。
[0079]
图10是用于说明实施例2的伪像去除方法的说明图,(a)表示修正前的x射线图像的一例,(b)表示修正后的x射线图像的一例。
[0080]
图11是用于说明实施例3的伪像去除方法的说明图,(a)表示修正前的x射线图像的一例,(b)表示修正后的x射线图像的一例。
[0081]
附图标记说明
[0082]
1 射线源
[0083]
11 窗户
[0084]
2 格栅部
[0085]
201 第1个区域
[0086]
202 第2个区域
[0087]
203:第3个区域
[0088]
21 g0格栅
[0089]
211 格栅部件(格栅构造)
[0090]
22 g1格栅
[0091]
221 格栅部件(格栅构造)
[0092]
23 g2格栅
[0093]
231 格栅部件(格栅构造)
[0094]
24 基板
[0095]
3 检测器
[0096]
4 移动机构
[0097]
5 处理部
[0098]
51:x射线图像生成部
[0099]
52:伪像处理部
[0100]
6 控制部
[0101]
7 驱动部
[0102]
10 被摄体
[0103]
20 莫尔条纹
[0104]
100、101、102、103 图像中的区域(roi)
具体实施方式
[0105]
以下,参考附图描述本发明的一实施方式的x射线图像生成装置(以下,有时简称为“生成装置”或“装置”)的结构。该装置是用于使用x射线的强度分布图像生成被摄体的x射线图像的装置。
[0106]
如图1所示,本实施方式的生成装置具备射线源1、格栅部2、检测器3和移动机构4。进而,该装置作为追加的要素具备处理部5、控制部6和驱动部7。
[0107]
(射线源)
[0108]
射线源1构成为从窗户11(参照图2)向格栅部2照射对被摄体10具有透过性的x射线。由于射线源1的结构基本上与以往相同,所以省略其进一步的详细说明。
[0109]
(格栅部)
[0110]
格栅部2具有构成塔尔博特干涉仪的多个格栅。具体而言,格栅部2具备g0格栅(所谓的射线源格栅)21、g1格栅(所谓的相位格栅)22和g2格栅(所谓的解析格栅)23。即,本实施方式的格栅部2除了包括构成塔尔博特干涉仪的g1格栅和g2格栅之外,还包括构成塔尔博特
‑
劳厄干涉仪的g0格栅。
[0111]
格栅部2具有在沿着移动机构4的被摄体10的移动方向的方向上排列的n个(n为2以上的自然数)区域。具体而言,本实施方式的格栅部2具备第1个区域201、第2个区域202、第3个区域203(参照图2)。作为区域的数量,只要是多个即可,也可以是4个以上。
[0112]
属于各区域201~203的多个格栅21~23中的相邻的格栅结构的周期方向相互不同。由此,在本实施方式中,属于n个区域中的第i个(其中1≤i≤n
‑
1)区域的多个格栅中的格栅结构的周期方向,和属于n个区域中的第i 1个区域的多个格栅中的格栅结构的周期方向为不同的方向。图3表示g0格栅21的一例。在该格栅中,对应三个区域201~203,设置有构成不同周期方向的格栅结构的格栅部件211、221、231。在其他的格栅中,在相同的区域201
~203中也是相同的周期方向的格栅构造,在不同的区域中也是不同的周期方向。
[0113]
多个格栅21~23中的至少一个(例如g2格栅23)为了生成“在移动机构4的移动方向上具有至少一个周期以上的强度变动,并且其强度变动可在检测器3中测量的莫尔干涉条纹”,成为“在为了构成塔尔博特干涉仪而应该配置的位置,相对于由g1格栅22生成的自身像以角度θ旋转配置的结构”(参照图4a)。其中,θ≠0。
[0114]
更详细地说,本实施方式中的所述角度θ(rad)设定在下述范围内:
[0115]
[式1]
[0116][0117]
其中,
[0118]
d:g2格栅的格栅周期;
[0119]
l
i
:n个区域中的第i个区域的被摄体的移动方向上的、检测器上的图像检测区域的宽度;
[0120]
ψi:在n个区域中的第i个区域中,由g1格栅生成的自身像的周期方向的角度(将与被摄体移动方向平行的方向设为0
°
);
[0121]
p:检测器的像素尺寸。
[0122]
另外,式(1)的左项意味着移动机构4的移动方向上的旋转莫尔干涉条纹生成的强度变动周期能够在检测器3的检测面内观测1个周期以上的条件,右项意味着该强度变动周期具有检测器3的3个像素以上的宽度的条件。
[0123]
其中,ψi取的范围为:
[0124]
[式2]
[0125][0126]
此时,若将各格栅区域的取向角中的从设计值的偏移量设为δψi,则
[0127]
max(δψi)
‑
min(δψi)<2dcosψi
[0128]
优选在一片基板24上生成如下的格栅21~23。
[0129]
例如,在d=5μm、l=10mm、ψ=45
°
、p=100μm的情况下,任一格栅21~23的旋转角θ(rad)为0.00071rad<|θ|<0.024rad的范围内。
[0130]
此外,l
i
可以设定为相对于ψi满足以下条件。
[0131]
[式3]
[0132][0133]
其中,
[0134]
l:关于所有的n个区域的被摄体的移动方向上的、检测器上的图像检测区域的总宽度。
[0135]
另外,式(3)是在检测器3的检测面内的所有n个区域中,与ψi无关地生成相同数量
的移动机构4的移动方向上的旋转干涉条纹生成的强度变动周期的条件。由此,式(1)的左项不依赖于ψi而在所有n个区域取一定的值,因此,格栅的调整变得简便。
[0136]
在此,图4b表示g1格栅22的自身像中的ψi的取法。在图4b中,将图中右端的区域201中的周期方向的角度设为ψi。
[0137]
本实施方式的格栅部2满足了用于构成塔尔博特干涉仪(包括塔尔博特
‑
劳厄干涉仪)所需的机械结构和几何配置的条件。但是,在本实施方式中,为了能够进行必要的检查,构成塔尔博特干涉仪的条件只要满足足够的程度即可,不需要在数学上严格的意义上满足条件。
[0138]
g0格栅21是用于构成作为塔尔博特干涉仪的一种的塔尔博特
‑
劳厄干涉仪的格栅,使用吸收型格栅。利用g0格栅实现了塔尔博特
‑
劳厄干涉仪的构成要素即微小光源阵列。g1格栅通常为相位型格栅,但也可以为吸收型格栅。作为g2格栅23,使用吸收型格栅。
[0139]
g0~g2格栅21~23分别具有多个格栅部件211、221、231以及支撑这些格栅部件的基板24(参照图3),所述多个格栅部件211、221、231以为了构成塔尔博特干涉仪而决定的既定周期配置。由此,本实施方式中的格栅21~23都是在一片基板24上形成了不同周期方向的格栅结构。格栅部件的既定周期是为了构成塔尔博特
‑
劳厄干涉仪而在几何学上计算出的周期,相同格栅中(即竖立设置在相同基板24上)的格栅部件211、221、231的既定周期相同。
[0140]
在本实施方式中,属于第1个区域201的格栅部件排列在第一方向上,属于第2个区域202的格栅部件排列在第二方向上,属于第3个区域203的格栅部件排列在第三方向上,第一方向、第二方向、第三方向分别不同。在此,第一方向是相对于移动机构4的被摄体10的移动方向为
‑
45
°
的方向,第二方向是与移动机构4的被摄体10的移动方向平行的方向,第三方向是相对于移动机构4的被摄体10的移动方向为 45
°
的方向。另外,这些角度是在使某一个格栅以角度θ旋转的情况下的旋转前的角度。另外,第一~第三方向也可以不一定包含相互正交的关系。
[0141]
图5表示透过各个区域的x射线的莫尔条纹20的一例。该莫尔条纹20由x射线的检测器3观测(在图6中示意性地表示该状态)。此时,干涉条纹的空间频率优选为,“在移动机构4的被摄体10的移动方向上1/(检测器3的像素尺寸
×
3)cycle/mm以下”,且“为处于在各个部分区域内能够观测1周期以上的强度变化的范围内”。在此,在本例中,为了偏离严格的干涉条件,如上述式(1)所示,使g2格栅23相对于基于x射线投影的自身像稍微倾斜。
[0142]
另外,如果式(1)的|θ|过大,则根据检测器难以进行条纹的析像,因此,优选在2~l/10p的范围内收敛莫尔条纹20的强度变化的周期。由此,在各区域中生成适当的莫尔条纹(参照图5)。在图5中,将检测器3的像素尺寸p的一例作为参考一并表示。
[0143]
g0~g2格栅21~23中的区域210~203的面积(配置格栅部件211、221、231的区域的面积)可以根据各个格栅21~23的位置和射线源1的位置来决定。但是,各区域201~203的位置及面积只要满足必要的干涉条件就可以变更。另外,一片基板24上的各区域201~203的面积也可以各不相同。例如,通过与满足式(3)的l
i
成比例地分别选择被摄体的移动方向的区域长度,各区域的强度变化的周期数成为相同数,格栅的调整变得简便。
[0144]
本实施方式的g0~g2格栅21~23排列成以射线源1为中心的同心圆状,以使各个格栅部件211~231与射线源1的距离一定(参照图1)。
[0145]
另外,g0~g2格栅21~23在相对于被摄体10的平移方向垂直的方向上排列有多个,由此,使视野的宽度扩大到一个格栅以上。
[0146]
(检测器)
[0147]
检测器3构成为,对每个像素检测通过了格栅部2的x射线并作为强度分布图像。具体而言,作为本实施方式的检测器3,使用在相对于被摄体10的移动方向和x射线照射方向所形成的面在垂直方向上延伸的检测面中能够对每个像素检测x射线的x射线摄像机。
[0148]
检测器3构成为,检测分别通过了格栅部2中的第1~3个区域201~203的x射线。另外,在检测器3的检测面内具有由p
×
q的像素构成的矩形区域,以使移动机构4的被摄体10的移动方向与p方向或q方向平行的方式设定检测器3的朝向。
[0149]
(移动机构)
[0150]
移动机构4使被摄体10在横穿向格栅部2照射的x射线的方向上相对于格栅部2相对移动。另外,本实施方式的移动机构4使被摄体10相对于格栅部2移动,但也可以使格栅部2相对于被摄体10移动。另外,作为移动方向,不限于平移,也可以是旋转。例如,也可以以被摄体10为中心使格栅部2、射线源1、检测器3等装置旋转。
[0151]
(处理部)
[0152]
处理部5具备x射线图像生成部51和伪像处理部52(参照图7)。
[0153]
x射线图像生成部51构成为,使用由检测器3取得的多个强度分布图像来生成x射线图像。伪像处理部52构成为,使用x射线图像中没有被摄体10的区域中的roi图像来去除所生成的x射线图像中的伪像。处理部5的详细动作作为本实施方式的x射线图像生成方法在后面叙述。
[0154]
(控制部)
[0155]
控制部6根据来自处理部5的指示向移动机构4发送指令,在必要的时刻使被摄体10移动。控制部6也可以是接收来自移动机构4的反馈来掌握被摄体10的位置的结构。本实施方式的控制部6还进行驱动部7的动作控制(后述)。
[0156]
(驱动部)
[0157]
在本实施方式中,驱动部7构成为,使g2格栅23在相对于被摄体10的移动方向和x射线照射方向所成的平面垂直的方向上移动。驱动部7可以使用用于使g2格栅23平移的适当的机构例如滚珠丝杠、线性电动机、压电元件、静电致动器等,但不限于此。另外,驱动部7也可以是代替g2格栅23而使g0格栅21或g1格栅22移动的结构。本实施方式的驱动部7构成为,根据来自控制部6的指令,在规定的时刻使格栅向规定的方向(例如往复移动方向)移动。
[0158]
(本实施方式的x射线图像生成方法)
[0159]
接着,参照图8进一步说明使用本实施方式的装置生成x射线图像的方法。
[0160]
(图8的步骤sa
‑
1)
[0161]
该步骤用于使用上述专利文献4的方法生成参考图像(没有被摄体的状态下的条纹图像)。
[0162]
首先,在没有被摄体的状态下,从射线源1向格栅部2照射x射线。由此,能够生成与格栅部2中的第1~3区域201~203分别对应的干涉条纹(莫尔条纹)(参照图5)。
[0163]
在该状态下,驱动部7使某一个格栅(在本实施方式中为g2格栅)等速且连续地移
动。由此,能够使干涉条纹连续地变化。
[0164]
与该动作并行,利用检测器3连续地(即作为动态图像)拍摄该干涉条纹的连续变化。
[0165]
在此,驱动部7的格栅的移动量,对于第1~3个区域201~203各自的干涉条纹,至少为1个周期以上。
[0166]
一般情况下,驱动部7的格栅的移动方向与第1~3个区域201~203的格栅方向(即格栅的周期方向)所成的角按每个区域而不同。于是,由驱动部7的移动引起的各区域中的干涉条纹的变化量也分别不同。因此,在本实施方式中,进行如上所述的步骤。
[0167]
在使干涉条纹变化的同时进行的拍摄结束后,驱动部7恢复到初始状态。即,移动后的格栅返回到初始位置。
[0168]
接着,处理部5根据一个周期以上连续变化的干涉条纹的一系列图像,在第1~3区域201~203各自中,生成作为每1/m周期的离散的像素值(变化)的集合的m张图像ak(参照专利文献4)。
[0169]
根据该离散的m张干涉条纹图像,分别在第1~3区域201~203各自中制作用于像素值标准化的平均强度分布a0。
[0170]
进而,在检测器3上生成的干涉条纹中,对第1个区域201、第2个区域202、第3个区域203分别制作,“沿着与移动机构4的搬送方向平行的方向将干涉条纹的变化的1个周期量m等分而生成的区域”中的、相当于第k个的区域的像素数的合计值gk(q)(相当于专利文献3中的nk(y))的分布。
[0171]
由于上述以外的方法与上述专利文献4相同,因此,省略其进一步的详细说明。
[0172]
(图8的步骤sa
‑
2)
[0173]
接着,一边通过移动机构4使被摄体移动,一边进行实质的条纹扫描。该方法与上述专利文献3中的方法相同。另外,上述步骤sa
‑
1的方法可以说是使用专利文献4的方法来进行该专利文献3中的没有采样的状态下的相位图(所谓的参考图像)的生成。
[0174]
在该步骤sa
‑
2中,由移动机构4移动的被摄体10在来自射线源1的x射线照射中,一边相对于格栅部2相对地平移移动一边通过第1个区域201、第2个区域202、第3个区域203(参照图6)。在此期间,检测器3连续地测量透过了格栅部2的x射线的强度。
[0175]
如果此时的平移速度为v,检测器3上的像素位置(p,q)处的第t帧的强度为i(p,q,t),则由于检测器3上的被摄体的相对位置为(p=x vt,q=y),所以相对于包含放大率的被摄体10的相对移动速度,第t帧的强度可以记述为i(p
‑
vt,q,t)。
[0176]
于是,根据在步骤sa
‑
1中求出的a0(p,q),gk(q),检测器3上的像素位置(p,q)中的、与干涉条纹的第k/m个相位量相当的周期区域的强度能表现为:jk(p,q)=∑[i(p
‑
vt,q,t)/a0(p,q)/gk(q)]。
[0177]
(图8的步骤sa
‑
3)
[0178]
因此,通过本实施方式的处理部5,
[0179]
吸收像abs(p,q)=∑jk(p,q)、
[0180]
微分相位图像φ(p,q)=arg[σjk(p,q)exp(i2πk/n)]、
[0181]
视觉图像vis(p,q)=2|∑jk(p,q)exp(i2πk/n)|/abs(p,q)、
[0182]
能够在第1个区域201、第2个区域202、第3个区域203中分别计算出。
[0183]
由于上述以外的方法与上述专利文献3的方法相同,因此省略其进一步的详细说明。
[0184]
(图8的步骤sa
‑
4)
[0185]
接着,在本实施方式中,对在此得到的各区域的视觉图像,进行条纹状的伪像的去除处理。该处理将“在摄影开始位置和摄影结束位置附近不存在被摄体的区域”设定为roi,并利用该roi中的像素值来进行。
[0186]
在此,在没有被摄体10的状态下,将在第1个区域201得到的视觉图像强度设为vis10,将在第2个区域202得到的视觉图像强度设为vis20,将在第3个区域203得到的视觉图像强度设为vis30。进而,将存在被摄体的状态下的上述各自的视觉图像强度设为vis1、vis2、vis3。于是,各区域中的散射强度分别表示为:
[0187]
s1=
‑
ln(vis1/vis10),
[0188]
s2=
‑
ln(vis2/vis20),
[0189]
s3=
‑
ln(vis3/vis30)。
[0190]
通过将没有被摄体10的区域指定为roi,能够使用上述计算进行伪像去除。roi的具体的取得方法和计算方向在下述实施例1~3中进行说明。
[0191]
(取向度信息的取得)
[0192]
基于以上的考察,
[0193]
所有方向散射成分分布s
all
=(s2 s3)/2
[0194]
各向异性成分分布
[0195]
取向度orientation=s
aniso
/s
all
[0196]
主取向方向分布θmain=0.5*atan 2(2(s1
‑
s
all
),2(s2
‑
s
all
))
[0197]
可以分别求出。该计算可以由处理部5进行。
[0198]
在本实施方式中,如上所述,能够取得多个方向上的相位对比度信息。在此,在现有技术中,由于需要旋转试样,因此存在视野变窄,并且装置结构复杂化的问题。与此相对,在本实施方式的技术中,能够不进行试样旋转而得到多个方向上的相位对比度信息,因此,具有不仅装置结构简化,而且能够得到宽的视野的优点。
[0199]
另外,在本实施方式中,由于使任意一个格栅旋转角度θ,所以具有在各区域中能够可靠地产生适合于生成x射线图像的莫尔条纹的优点。
[0200]
进而,在本实施方式中,由于在基板24上竖立设置有格栅部件211、221、231,所以与分别构成配置格栅部件211、221、231的情况相比,能够容易地进行格栅21~23向装置的设置作业。
[0201]
另外,如果将格栅部件211、221、231分别构成并设置在装置中,则在格栅部件之间产生间隙,格栅在扇角上变宽。与此相对,在本实施方式中,由于在基板24上竖立设置了格栅部件211、221、231,所以能够使格栅部件211、221、231之间的间隙极小(优选为0),能够防止扇角的扩展。由此,能够抑制无用的x射线的照射。
[0202]
此外,在本实施方式中可以省略伪像去除处理。
[0203]
(实施例1)
[0204]
接着,进一步参照图9说明本实施方式的实施例1的伪像去除处理的方法。在该实施例1的说明中,对于与上述的一实施方式的方法基本共通的要素,通过使用同一符号而省
略说明。
[0205]
在本实施例中,首先,将得到的图像中的像素值设为i(x,y)。接着,使用以下的方法。
[0206]
(1)设定不存在被摄体的矩形区域100(参照图9中粗线),将区域的x坐标两端设为x
roi
1、x
roi
2(图9(a))。
[0207]
(2)根据i
bg
(y)=(1/(x
roi2‑
x
roi
1 1))∑i(x,y),对每个y坐标取x
roi
1到x
roi
2之间的像素值的平均值。
[0208]
(3)吸收像/散射像中,
[0209]
i
off
(x,y)=i(x,y)/i
bg
(y),
[0210]
在折射像中,
[0211]
i
off
(x,y)=i(x,y)
‑
i
bg
(y)
[0212]
分别进行修正。由此,能够进行伪像的去除(参照图9(b))。
[0213]
(实施例2)
[0214]
接着,进一步参照图10说明实施例2的伪像去除处理的方法。在该实施例2的说明中,对于与上述实施例1的方法基本相同的要素,使用相同的符号,省略说明。
[0215]
在本实施例中,使用以下的方法。将得到的图像中的像素值设为i(x,y)。
[0216]
(1)将不存在被摄体10的矩形区域101、102(参照图10(a)的粗线)设定在扫描开始点附近和结束点附近这两处。在此,将矩形区域的x坐标端在扫描开始点附近设为x
roi
11、x
roi
12,在扫描结束点附近设为x
roi
21、x
roi
22。
[0217]
(2)接着,分别取2区域101、102的平均。具体而言,在每个y计算出
[0218]
i
bg
1(y)=(1/(x
roi
12
‑
x
roi
11 1))∑i(x,y)
[0219]
i
bg
2(y)=(1/(x
roi
22
‑
x
roi
21 1))∑i(x,y)。
[0220]
(3)假设像素值在两个区域101、102之间在x方向上线性函数地变化。
[0221]
则为,i
bg
(x,y)=i
bg
1(y) x*(i
bg
2(y)
‑
i
bg
1(y))/(x
roi
21
‑
x
roi
11 1)。
[0222]
(4)在吸收像/散射像中,
[0223]
i
off
(x,y)=i(x,y)/i
bg
(x,y),
[0224]
在折射像中,
[0225]
i
off
(x,y)=i(x,y)
‑
i
bg
(x,y)
[0226]
由此,能够修正各个像。由此,能够进行伪像去除(参照图10(b))。
[0227]
(实施例3)
[0228]
接着,进一步参照图11说明实施例3的伪像去除处理的方法。在该实施例3的说明中,对于与上述实施例1的方法基本相同的要素,使用相同的符号,省略说明。
[0229]
在本实施例中,使用以下的方法。
[0230]
(1)在没有被摄体的状态下进行拍摄。接着,设定直线上的区域(roi)103(图11(a)的粗线),将其x方向两端分别设为x
roi
1、x
roi
2。
[0231]
(2)用二次函数ax2 bx c对每个y拟合从x
roi
1到x
roi
2的区域的像素值i(x,y)。即,设i
bg
(x,y)=a(y)x2 b(y)x c(y),决定每个y的系数a(y)、b(y)、c(y)。
[0232]
(3)在吸收像/散射像中,
[0233]
i
off
(x,y)=i(x,y)/i
bg
(x,y),
[0234]
在折射像中,
[0235]
i
off
(x,y)=i(x,y)
‑
i
bg
(x,y)
[0236]
能够修正各个像。由此,能够进行伪像去除(参照图11(b))。
[0237]
另外,上述实施方式及各实施例的记载只不过是一个例子,并不表示本发明所必须的结构。各部分的结构只要能够实现本发明的主旨,则不限于上述结构。
[0238]
例如,也可以是使用微小焦点x射线源而省略g0格栅的结构(即,塔尔博特
‑
劳厄干涉仪结构)。在该情况下,在g1格栅和g2格栅中,使格栅部件的周期方向按每个区域不同即可。
[0239]
另外,在上述实施方式中,将各格栅形成为以射线源1为中心的同心圆状,但也可以形成为平板状。
[0240]
另外,在本实施方式中,在各格栅中,构成为具有三个周期方向,能够检测向三个方向的各向异性的结构,但也可以构成为具有两个周期方向,检测向两个方向的各向异性的结构。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。