1.本发明属于土壤检测设备领域,尤其涉及多功能取土机器人。
背景技术:
2.为了对地质、土壤等进行勘测以了解其性质,通常需要利用取土装置将下层土壤原样土提起并对其进行检测,有时甚至要在较深处取原样土,以保证检测数据的真实性以及准确性。因此,目前取土机器人已广泛被应用于环保、地质勘探、应急、军事和科研等各领域。使用自动化的土壤采样转用设备,取样过程中能够有效避免二次污染。
3.但现有的取土钻机多采用直推或其他单一方式取土,存在取土方式单一,不能适用于全地形取土,在地形复杂或地质不佳的情况下,无法正常完成取土工作。另外还存在取土深度浅,取土深度准确度低,无法在强酸碱、高温、低温、土质松软、雨水等恶劣环境下正常工作的问题。
4.基于以上描述,亟需一种多功能取土机器人, 能够根据地形、地质情况,选择不同的取土方式,保证并准确控制取土深度,同时能在各种复杂恶劣的工作环境下正常工作。
技术实现要素:
5.本发明目的在于提供一种多功能取土机器人,以解决取土方式单一,不能适用于各种复制地形、地质,以及各种恶劣工作环境的问题。
6.为解决上述技术问题,本发明的一种多功能取土机器人的具体技术方案如下:一种多功能取土机器人,包括钻杆钻臂和车架,钻臂与车架连接,车架上固定安装有动力机构,车架下固定设置行走机构,其中,钻臂一侧沿长度方向平行设有直推机构,直推机构为可伸缩的杆状结构,直推机构一端与钻臂顶端固定连接,另一端固定设置起拔器和回转冲击机构,起拔器和回转冲击机构均与钻臂滑动连接,并跟随直推机构的伸缩钻臂长度方向滑动。
7.进一步地,所述起拔器为液压起拔器,所述回转冲击机构包括液压旋转油缸和双作用式液压冲击锤,所述直推机构伸缩式液压杆。
8.进一笔地,所述钻臂和车架之间设置有调节调节机构,钻臂和车架通过调节机构活动连接,钻臂相对车架在钻臂长度方向移动,也可相对于水平面调节角度。
9.进一步地,所述调节单元包括竖直调节杆,角度调节杆和调节座,竖直调节杆和角度调节杆均为伸缩式液压杆,竖直调节液压杆一端与钻臂铰接,另一端与调解座固定连接,角度调节液压杆一端与调节座铰接,另一端与车架铰接,调节座与钻臂滑动连接,调节座与钻臂在钻臂长度方向上可相对滑动,调解座与车架铰接。
10.进一步地,所述行走机构为履带式行走底盘。
11.进一步地,所述履带式行走底盘包括与地面接触的履带,履带材料包括三元乙丙橡胶、玻璃纤维线绳和尼龙弹性布。
12.进一步地,所述钻臂为中空箱式结构。
13.进一步地,所述车架包括上车架和下车架,上车架与下车架之间设有轴承,上车架可相对于下车架绕轴承轴线转动。
14.进一步地,所述轴承为回转轴承。
15.进一步地,动力机构外面设有保护罩,保护罩密封设置,保护罩与车架连接处设有橡胶垫片。
16.本发明的一种多功能取土机器人,具有以下优点:1、本发明设有起拔器、回转冲击机构和直推机构,能够根据不同地质情况、取土环境、取土深度等,选择直推式取土、回转式取土或落锤式取土三种模式,增加了本发明多功能取土机器人的适应性,提高了工作效率,同时采用三种模式相结合进行取土,能够增大取土深度。
17.2、本发明的起拔器、回转冲击机构和直推机构均采用液压控制,能准确控制深度、力度和扭矩,从而准确控制取土深度,满足勘探检测需求。
18.3、本发明设有调节机构,能够实现钻臂沿长度方向的移动,以及相对于水平面的角度调节,从而实现各种地形的取土,提高了适应性,同时,钻臂可实现水平放置,方便运输。
19.4、本发明钻臂采用中空箱式结构,在结构强度满足要求的情况下,其刚性更大,重量更轻,从而大大降低整个取土机器人的重量,减小对地面的压强,从而更利于机器人在地面松软的环境下行使和工作。
20.5、本发明采用履带式行走底盘,可以高速行进,另外,履带优选采用三元乙丙橡胶、玻璃纤维线绳和尼龙弹性布三种主要材料制作而成,其电绝缘性、耐化学性、冲击弹性、耐酸碱性好,同时还具有牵引力大、振动小、噪声低、湿田地通过性好、不易损伤路面、行驶速度快等特点,而且使用温度范围广,约为-50℃~+150℃,使本发明的多功能取土机器人环境适应性更广。
21.6、本发明采用上下车架的设计,且上下车架可相对转动,从而在取土时,可选择取土机器人周围的任意位置取土,方便操作。
22.7、本发明采用全密封保护罩,且保护罩与车架处设有橡胶垫片,能适应雨水等天气,防止淋雨或进水导致故障,提高可靠性。
附图说明
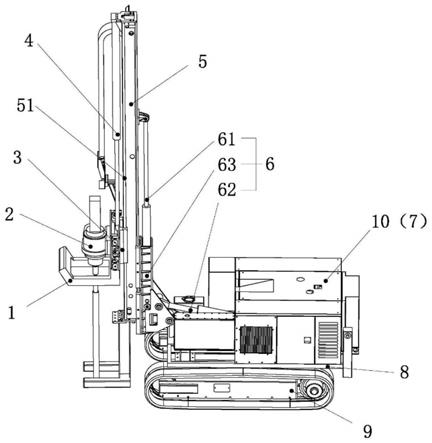
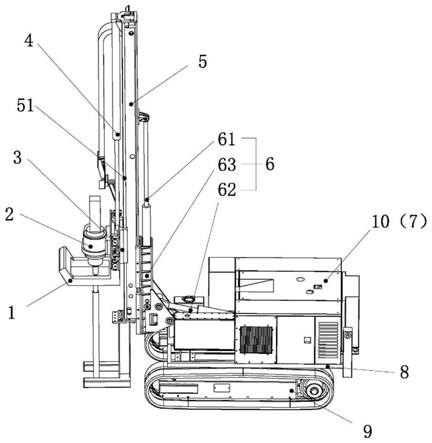
23.图1为本发明的结构示意图。
24.图中:1、起拔器;2、回转冲击机构;3、滑块;4、直推机构;5、钻臂;6、调节机构;7、动力机构;8、车架;9、行走机构;10、保护罩;51、滑轨;61、竖直调节杆;62、角度调节杆;63、调节座。
具体实施方式
25.为了更好地了解本发明的控制系统及其控制方法,下面结合附图,对本发明的一种多功能取土机器人做进一步详细的描述。为叙述方便,下文中所述的“上”、“下”等方向均与附图中的方向一致,但这不能成为本发明技术方案的限制。
26.如图1所示,本发明的一种多功能取土机器人包括钻臂5和车架8,钻臂5一侧设有
沿钻臂长度方向的滑轨51,滑轨51上安装滑块3,滑块可沿滑轨滑动。滑块上通过螺钉固定安装有起拔器1和回转冲击机构2。直推机构4与钻臂5平行设置,一端与钻臂顶端固定连接,另一端与滑块固定连接。直推机构的伸缩可带动滑块3沿滑轨51滑动,从而带动起拔器1和回转冲击机构2沿滑轨51滑动。
27.所述钻臂5的另一侧通过调节结构6与所述车架8连接,通过调节机构6,钻臂5可实现沿钻臂长度方向的移动,以及相对于水平面的角度调节,从而实现各种地形的取土,例如从有坡度的地形取土,另外,钻臂可水平放置,方便运输。车架上固定安装有动力机构7,用于为多功能取土机器人提供动力。车架下固定设有行走机构9,与动力机构7连接,用于实现多功能取土机器人的移动。
28.所述起拔器1可选择能实现自动提钻的液压起拔器。
29.所述回转冲击机构2包括液压旋转油缸和双作用式液压冲击锤,可根据需要选择钻进形式。所述液压旋转油缸可在很小的空间里运用液压集合非常高的扭矩,将钻杆与其连接,可带动钻杆高速旋转,从而钻入土中,不仅动力高,而且容易精确地控制。所述双作用式液压冲击锤可以从液压系统获得加速度能量来提高冲击速度而打击钻杆,其锤芯重量小,冲击速度高,锤击作用时间短,冲击能量大。使用时,双作用式液压冲击锤与钻杆竖直对准,通过驱动器调节液压泵的油压来调节液压缸所获得的加速度能量,从而可以根据所要取土深度来调节锤击的冲击力,使得所要取土深度更精确。
30.所述直推机构4为可控制伸缩的杆状机构,优选为伸缩式液压杆,其具有推力大、易操控的特点。
31.基于以上构造,在本发明的一种多功能取土机器人工作时,可根据不同地质情况、取土环境、取土深度等,选择直推式取土、回转式取土、落锤式取土三种模式。在直推式取土时,直推机构4推动起拔器1将钻杆推入土壤中取土;在回转式取土时,在直推机构4和回转冲击机构2的作用下将钻杆钻入土壤中取土;在落锤式取土时,回转冲击机构2还可用于对钻杆实施高频率锤击取土。在直推式取土或回转式取土时,通过直推机构4的驱动装置,机器人的操作者即可控制直推力的大小,从而精确的控制取土深度。在取土完成后,直推机构4带动起拔器1将钻杆拔起,而后取出内芯。
32.所述调节单元6包括竖直调节杆61,角度调节杆62和调节座63,竖直调节杆61和角度调节杆62均为伸缩式液压杆,竖直调节液压杆61一端与钻臂5铰接,另一端与调解座63固定连接,角度调节液压杆62一端与调节座铰接,另一端与车架8铰接,调节座63与钻臂5滑动连接,调节座与钻臂在钻臂长度方向上可相对滑动,调解座63与车架8铰接。通过竖直调节杆61,角度调节杆62的伸缩和各铰接处的转动,可实现沿钻臂长度方向的移动,以及相对于水平面的角度调节。
33.所述动力机构7包括大功率伺服电机和大容量电池组(图中未标出),大容量电池组可同时为伺服电机和液压装置的电磁阀供电。所述液压装置包括但不限于上述液压起拔器、液压旋转油缸、双作用式液压冲击锤、伸缩式液压杆。
34.所述行走机构9优选采用履带式行走底盘,可以高速行进。所述履带优选采用三元乙丙橡胶、玻璃纤维线绳和尼龙弹性布三种主要材料制作而成,其电绝缘性、耐化学性、冲击弹性、耐酸碱性好,同时还具有牵引力大、振动小、噪声低、湿田地通过性好、不易损伤路面、行驶速度快等特点,而且使用温度范围广,约为-50℃~+150℃。使用该优选方案,本
发明的取土机器人除了能在常规环境下作业外,还能在
‑
50℃~+150℃的温度下,酸性和碱性环境中作业,环境适应性更广。
35.优选地,所述钻臂5可采用中空箱式结构,在结构强度满足要求的情况下,其刚性更大,重量更轻,从而大大降低整个取土机器人的重量,减小对地面的压强,从而更利于机器人在地面松软的环境下行使和工作。
36.优选地,所述车架8包括上车架和下车架(图中未标出),上车架与调节单元6、动力机构7连接,下车架与行走机构9连接,上车架与下车架之间设有轴承,上车架可相对于下车架绕轴承轴线转动,所述轴承包括但不限于回转轴承。所述车架8上还设置有马达,马达可以固定在下车架,并接合上车架,或者反之,通过马达施加的力,实现上车架和下车架的相对转动,从而在取土时,可选择取土机器人周围的任意位置取土,方便操作。
37.优选地,所述动力机构7外面设有保护罩10,保护罩10与车架8连接处设有橡胶垫片,在零部件贯穿处(图中未标出)均使用密封件贴合密封进行防水处理,可防止液体溅入导致机器人出现故障,从而防止因取土机器人作业过程中意外淋雨或行走过程中水坑溅出污水而导致发生故障。
38.优选地,所述钻臂5顶部设有云台11,云台可实现水平360
°
旋转和180
°
俯仰,云台上设有高清摄像头12,可以使取土机器人操控者远程获取取土机器人行走时自身所处环境和工作取土的实时画面,从而使取土机器人操纵者更容易对取土机器人进行操纵。
39.优选地,本发明的一种多功能取土机器人采用遥操作控制方式,操作者可远距离控制取土机器人的移动和工作,从而达到取土的目的。
40.可以理解,本领域技术人员知悉的,在不脱离本发明的精神和范围的情况下,可以对该方法进行各种改变或等效替换。另外,在本发明的教导下,可以对该方法进行修改以适应具体的情况而不会脱离本发明的精神和范围。因此,本发明不受此处所公开的具体实施例的限制,所有落入本技术的权利要求范围内的实施例都属于本发明所保护的范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。