1.本发明涉及环卫机械领域,尤其涉及一种联合疏通设备作业模式选择及控制方法、系统。
背景技术:
2.随着城市人口的不断增加与地下管网老化进程的加快,城市地下管网承受的压力越来越大,市政环卫部门需要投入大量的人力、物力来保证城市地下管网的畅通,保障人们生产生活的正常有序运行。在进行城市地下管网堵塞疏通和垃圾清理作业时,现有设备需要先进行相关操作和相关参数的设定,然后进行疏通作业,过程中需要实时控制疏通软管的前进和后退来进行管网堵塞物的疏通清理,待疏通操作完成后再进行管网垃圾的抽吸转运清理工作,现有操作方法不但流程繁琐,而且增加工人劳动强度,过程中还可能发生因部分步骤未执行而带来的危险。
技术实现要素:
3.本发明的目的是提供一种联合疏通设备作业模式选择及控制方法、系统,实现自动抽吸物料和疏通地下管网堵塞物的功能,减少操作步骤,降低劳动轻度,提高操作的自动化水平,增加设备使用的安全性。
4.本发明为实现上述发明目的采用如下技术方案:
5.本发明提供了一种联合疏通设备作业模式选择及控制方法,包括:
6.获取作业模式,所述作业模式包括抽吸模式、疏通模式和联合模式;
7.对所述作业模式进行选择,选定作业模式后,进入下一层级工况选择;
8.选择其中一个工况后,向各控制单元发送命令,设备将按照预存储模式进行工作。
9.进一步地,对所述作业模式进行选择的方法包括:
10.当选择抽吸模式时,进入抽吸介质选择,所述抽吸介质包括固态介质和液态介质,选择确认其中一个介质;
11.控制器响应到自动/手动开关打到自动模式时,会自动检测自动模式信号;
12.当检测到自动模式信号后,控制器通信于底盘bbm检测发动机转速是否处于怠速状态并自动接收检测单元罐体料位传感器、液压油低液位传感器所发出的检测信号;
13.控制器会自动识别是否有故障报警信号,如若发动机转速非怠速状态,或接收的检测信号有报警,控制器通信于显示器显示报警原因,并将报警信号发送给报警单元;
14.控制器通信于底盘bbm自动将发动机转速降为怠速,控制风机不工作,延时t5时间后吸入阀、防溢阀自动关闭;
15.若发动机转速处于怠速状态并无故障报警信号,控制器控制吸入气阀、防溢气阀自动打开,延时设定时间后风机气阀自动打开;
16.控制器接收风机转速传感器发送的检测信号,此时显示器实时显示罐体料位百分比和风机转速,物料将由吸污管输送到罐体内。
17.进一步地,当选择固态介质预存储模式时,控制风机转速自动达到设定值r1运行;
18.设置罐体真空压力最优设定范围p1,若真空压力小于设定值p1的时间大于t1,并且通过料位传感器检测罐体内物料在设定时间t2内未增加,此时将风机转速降到风机运行的最低转速r2;
19.当真空压力达到设定值p1或料位传感器检测到罐体内有物料增加,风机转速自动增加到设定值r1;若真空压力大于或等于设定值p1,并且料位传感器检测罐内物料在设定时间t3内未增加,此时自动增加风机转速,直到料位传感器检测到罐体内新增物料时,转速增加停止并保持;
20.若罐体内真空压力大于设定值p2时,报警单元进行报警,泄压气阀自动打开t4时间后自动关闭。
21.进一步地,当选择液态介质预存储模式时,控制风机转速自动达到设定值r4运行;
22.设置罐体真空压力最优设定范围p3,若真空压力小于设定值p3的时间大于t1,并且通过料位传感器检测罐内物料在设定时间t2内未增加,此时自动将风机转速降到风机运行的最低转速r2;
23.当真空压力达到设定值p3或料位传感器检测到罐体内有物料增加,风机转速自动增加到设定值r4;
24.若真空压力小于设定值p3,并且通过料位传感器检测罐内物料在设定时间t2内增加,此时增加风机转速直到真空压力达到设定值p3;
25.若罐体内真空压力大于设定值p2时,报警单元进行报警,泄压气阀自动打开t4时间后自动关闭。
26.进一步地,对所述作业模式进行选择的方法包括:
27.当选择疏通模式时,进入工况选择,所述工况选择包括常规工况、软堵塞工况和硬堵塞工况,选择确认其中一个工况;
28.控制器响应到自动/手动开关打到自动模式时,会自动检测自动模式信号;
29.当检测到自动模式信号后,控制器通信于底盘bbm检测发动机转速是否处于怠速状态并自动接收水箱液位传感器、液压油低液位传感器、水箱阀关闭所发出的检测信号;
30.控制器会识别是否有故障报警信号,如若发动机转速非怠速状态,或接收的检测信号有报警,控制器会通信于显示器显示报警原因,并发出报警信号给报警单元;
31.控制器会通信于底盘bbm自动将发动机转速降为怠速,控制水泵不工作;
32.若发动机转速处于怠速状态并无故障报警信号,控制器控制水泵气阀、卷盘前进阀、卷盘速度阀、卷盘卸荷阀开启;
33.水泵将按照预存储模式运行,同时疏通软管前进,控制器接收水泵转速传感器和编码器发送的数据,控制器将数据发送于显示器,以显示水泵转速和疏通软管前进米数。
34.进一步地,当选择常规工况预存储模式时,控制水泵转速、流量自动达到设定值w1运行,疏通软管前进速度达到设定值w2;
35.疏通软管前进过程中,控制器接收编码器将软管前进米数信号,控制器在检测到水泵气阀开启信号后,控制器会根据前进米数和时间计算疏通软管前进速度;
36.当控制器检测到软管前进速度小于设定值w3时,控制器将发送指令将水泵转速、水泵流量增加至设定值w4,疏通软管前进速度减小到设定值w5;
37.控制器发送命令给卷盘前进阀,软管前进到所设定米数s1时,卷盘前进阀失电,卷盘后退阀得电;软管后退到所设定米数s1时,卷盘后退阀失电,卷盘前进阀得电,直到控制器检测到软管前进速度大于设定值w3;
38.控制器将发送指令将水泵转速、水泵流量恢复到设定值w1运行,疏通软管前进速度恢复到设定值w2,疏通软管前进;
39.设置疏通软管前进米数s2,达到设定值s2时,控制器控制报警单元进行报警;
40.控制器发送停止命令到水泵气阀、卷盘前进阀、卷盘速度阀、卷盘卸荷阀,水泵和疏通软管自动停止;
41.控制器发送开启命令到卷盘后退阀、卷盘速度阀、卷盘卸荷阀,疏通软管自动回拉,控制器接收编码器信号检测为水泵气阀开启信号之前的初始值时,发送关闭信号给卷盘后退阀、卷盘速度阀、卷盘卸荷阀,疏通软管自动停止。
42.进一步地,当选择软堵塞工况预存储模式时,控制水泵转速、流量自动达到设定值w5运行,疏通软管前进速度达到设定值w6;
43.疏通软管前进过程中,控制器接收编码器将软管前进米数信号,控制器在检测到水泵气阀开启信号后,控制器会根据前进米数和时间计算疏通软管前进速度;
44.当控制器检测到软管前进速度小于设定值w3时,控制器将发送指令将水泵转速、水泵流量增加至设定值w4,疏通软管前进速度减小到设定值w5;
45.控制器发送命令给卷盘前进阀,软管前进到所设定米数s1时,卷盘前进阀失电,卷盘后退阀得电;软管后退到所设定米数s1时,卷盘后退阀失电,卷盘前进阀得电,直到控制器检测到软管前进速度大于设定值w3;
46.控制器将发送指令将水泵转速、水泵流量恢复到设定值w1运行,疏通软管前进速度恢复到设定值w2,疏通软控制器响应到自动/手动开关打到自动模式时,会自动检测自动模式信号前进;
47.设置疏通软管前进米数s2,达到设定值s2时,控制器控制报警单元进行报警;
48.控制器发送停止命令到水泵气阀、卷盘前进阀、卷盘速度阀、卷盘卸荷阀,水泵和疏通软管自动停止;
49.控制器发送开启命令到卷盘后退阀、卷盘速度阀、卷盘卸荷阀,疏通软管自动回拉,控制器接收编码器信号检测为水泵气阀开启信号之前的初始值时,发送关闭信号给卷盘后退阀、卷盘速度阀、卷盘卸荷阀,疏通软管自动停止。
50.进一步地,当选择硬堵塞工况预存储模式时,控制水泵转速、流量自动达到设定值w7运行,疏通软管前进速度达到设定值w8;
51.疏通软管前进过程中,控制器接收编码器将软管前进米数信号,控制器在检测到水泵气阀开启信号后,控制器会根据前进米数和时间计算疏通软管前进速度;
52.当控制器检测到软管前进速度小于设定值w3时,控制器将发送指令将水泵转速、水泵流量增加至设定值w4,疏通软管前进速度减小到设定值w5;
53.控制器发送命令给卷盘前进阀,软管前进到所设定米数s1时,卷盘前进阀失电,卷盘后退阀得电;软管后退到所设定米数s1时,卷盘后退阀失电,卷盘前进阀得电,直到控制器检测到软管前进速度大于设定值w3;
54.控制器将发送指令将水泵转速、水泵流量恢复到设定值w1运行,疏通软管前进速
度恢复到设定值w2,疏通软管前进;
55.设置疏通软管前进米数s2,达到设定值s2时,控制器控制报警单元进行报警;
56.控制器发送停止命令到水泵气阀、卷盘前进阀、卷盘速度阀、卷盘卸荷阀,水泵和疏通软管自动停止;
57.控制器发送开启命令到卷盘后退阀、卷盘速度阀、卷盘卸荷阀,疏通软管自动回拉,控制器接收编码器信号检测为水泵气阀开启信号之前的初始值时,发送关闭信号给卷盘后退阀、卷盘速度阀、卷盘卸荷阀,疏通软管自动停止。
58.进一步地,对所述作业模式进行选择的方法包括:
59.当选择联合模式时,进入工况选择,所述工况选择包括抽吸介质和疏通工况,选择确认其中一个工况;
60.控制器响应到自动/手动开关打到自动模式时,会自动检测自动模式信号;
61.当检测到自动模式信号后,控制器通信于底盘bbm并检测发动机转速是否处于怠速状态并自动接收罐体料位传感器、水箱液位传感器、液压油低液位传感器、水箱阀关闭所发出的检测信号;
62.控制器会识别是否有故障报警信号,如若发动机转速非怠速状态,或接收的检测信号有报警,控制器会通信于显示器显示报警原因,并发出报警信号给报警单元;
63.控制器会通信于底盘bbm自动将发动机转速降为怠速,控制水泵和风机不工作;
64.若发动机转速处于怠速状态并无故障报警信号,控制器将发送开启命令给执行单元水泵气阀、卷盘前进阀、卷盘速度阀、卷盘卸荷阀,水泵将按照所选择的预存储模式运行,同时疏通软管前进;
65.控制器接收水泵转速传感器和编码器的数据,并将数据通过can总线发送于显示器,以显示水泵转速和疏通软管前进米数;
66.疏通一段时间后,控制风机将按照所选择的预存储模式运行,此时显示器将实时显示罐体料位百分比和风机转速,物料将由吸污管输送到罐体内;
67.当控制器检测到水泵停止信号后,控制疏通软管自动回拉;
68.当控制器接收编码器信号检测为水泵气阀开启信号之前的初始值时,发送关闭信号给卷盘后退阀、卷盘速度阀、卷盘卸荷阀,疏通软管自动停止。
69.本发明提供了一种联合疏通设备作业模式选择及控制系统,包括检测单元、操作单元、控制单元、显示单元、报警单元和执行单元;
70.所述检测单元包括水泵转速传感器、风机转速传感器、软管回拉力传感器、罐体料位传感器、水箱液位传感器、编码器、液压油低液位传感器;
71.所述操作单元包括水箱阀开关、风机开关、水泵开关、自动/手动开关、一键启动按键、一键停止按键;
72.所述报警单元包括蜂鸣器、罐体料位高报警灯、水箱液位低报警灯、水箱阀关闭报警灯、疏通管回拉力报警灯;
73.所述执行单元包括风机气阀、水泵气阀、卷盘前进阀、卷盘后退阀、卷盘速度阀、卷盘卸荷阀。
74.本发明的有益效果如下:
75.本发明通过抽吸作业模式、疏通作业模式和联合作业模式的选择,实现自动抽吸
物料和疏通地下管网堵塞物的功能,减少操作步骤,降低劳动轻度,提高操作的自动化水平,增加设备使用的安全性。
附图说明
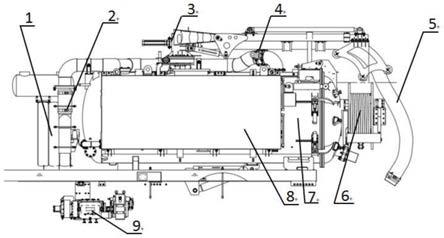
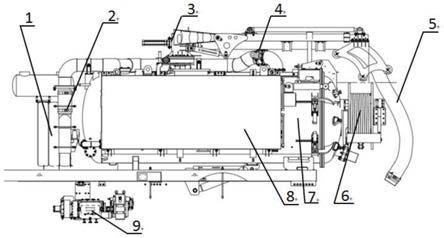
76.图1为根据本发明实施例提供的一种联合疏通设备的结构示意图;
77.图2为根据本发明实施例提供的一种联合疏通设备作业选择及控制系统图;
78.图3为根据本发明实施例提供的一种联合疏通设备作业模式选择流程图;
79.图4为根据本发明实施例提供的一种联合疏通设备作业模式控制流程图。
具体实施方式
80.下面结合具体实施例对本发明作进一步描述。以下实施例仅用于更加清楚地说明本发明的技术方案,而不能以此来限制本发明的保护范围。
81.本发明旨在提供一种联合疏通设备作业模式选择及控制方法,该系统通过抽吸作业模式、疏通作业模式和联合作业模式的选择,实现自动抽吸物料和疏通地下管网堵塞物的功能,减少操作步骤,降低劳动轻度,提高操作的自动化水平,增加设备使用的安全性。
82.为实现上述目的,本发明包括:
83.如图1所示,实现联合疏通设备作业模式选择及控制方法的主要组成元件包括风机1、泄压气阀2、吸入气阀3、防溢气阀4、吸污管5、疏通软管6、罐体7、水箱8、高压水泵9。如图2所示,联合疏通设备作业控制系统组成如下:
84.检测单元10包括:水泵转速传感器10
‑
1、风机转速传感器10
‑
2、软管回拉力传感器10
‑
3、罐体料位传感器10
‑
4、水箱液位传感器10
‑
5、编码器10
‑
6、液压油低液位传感器10
‑
7。
85.操作单元11包括:水箱阀开关11
‑
1、风机开关11
‑
2、水泵开关11
‑
3、自动/手动开关11
‑
4、一键启动按键11
‑
5、一键停止按键11
‑
6。
86.控制单元(控制器)12、显示单元(显示器)13。
87.报警单元14包括:蜂鸣器14
‑
1、罐体料位高报警灯14
‑
2、水箱液位低报警灯14
‑
3、水箱阀关闭报警灯14
‑
4、疏通管回拉力报警灯14
‑
5。
88.执行单元15包括:风机气阀15
‑
1、水泵气阀15
‑
2、卷盘前进阀15
‑
3、卷盘后退阀15
‑
4、卷盘速度阀15
‑
5、卷盘卸荷阀15
‑
6。
89.具体控制流程如下:
90.在进行城市地下管网联合疏通作业时,如图3所示,首先需根据施工现场实际工况进行作业模式的选择,步骤包括:显示器13通过can总线通信于控制器12,操作人员可在显示器13上面通过按键选择作业模式,分为抽吸模式、疏通模式和联合模式,选定其中一个作业模式后,按下确认键,进入下一层级工况选择,选择其中一个选项,按下确认键,选择模式完成,系统通过can总线将命令发送至控制器12,控制器12将向各控制单元发送命令,设备将按照预存储模式进行工作。
91.本发明设计三种作业模式:
92.抽吸物料时选择抽吸作业模式,如图4所示,在显示器13上操作选择键选择抽吸模式,按下确认键进入抽吸介质选择界面,分为固态介质和液态介质,选择其中一个选项,按下确认键,抽吸模式选择完成。
93.通过操作单元11自动/手动开关11
‑
4,将开关打到自动模式,控制器12会自动检测自动模式信号,当检测到自动模式信号后,控制器12会通过can总线通信于底盘bbm检测发动机转速是否处于怠速状态并自动接收检测单元10罐体料位传感器10
‑
4、液压油低液位传感器10
‑
7所发出的检测信号,控制器12会自动识别是否有故障报警信号,如若发动机转速非怠速状态,或其中某一个信号有报警,控制器11会通过can总线通信于显示器13显示报警原因,并将信号发送给报警单元14蜂鸣器14
‑
1并发出蜂鸣,所检测到的报警信号对应罐体料位报警灯14
‑
2同时亮起,控制器12会通过can总线通信于底盘bbm自动将发动机转速降为怠速,按下一键启动按键11
‑
5风机1不工作,防止动力执行部件的损坏;若发动机转速处于怠速状态并无故障报警信号,按下操控单元11一键启动按键11
‑
5,控制器12将发送命令给吸入气阀3、防溢气阀4自动打开,延时2秒后风机气阀15
‑
1自动打开,防止操作人员误操作未打开气动阀,罐体7压力升高无法抽吸物料。风机1将按照预存储模式自动运行,检测单元10风机转速传感器10
‑
2将检测信号发送给控制器12,此时显示器13通过can总线通信将实时显示罐体料位百分比和风机转速,物料将由吸污管4输送到罐体7内。
94.固态介质预存储模式:按下一键启动按键11
‑
5,风机转速自动达到设定值r1(最优转速)运行,设置罐体真空压力最优设定范围p1,若真空压力小于设定值p1的时间大于t1,并且通过料位传感器10
‑
4检测罐体内物料在设定时间t2内未增加,此时自动将风机转速降到风机运行的最低转速r2,防止未抽吸物料时造成能耗的浪费,当真空压力达到设定值p1或料位传感器检测到罐体内有物料增加,风机转速自动增加到设定值r1;若真空压力大于或等于设定值p1,并且料位传感器10
‑
4检测罐内物料在设定时间t3内未增加,此时自动增加风机转速,直到料位传感器10
‑
4检测到罐体内新增物料时,转速增加停止并保持(风机转速不超过设定值r3),若罐体内真空压力大于设定值p2时,蜂鸣器14
‑
1蜂鸣,泄压气阀2自动打开t4时间后自动关闭。
95.液态介质预存储模式:按下一键启动按键11
‑
5,风机转速自动达到设定值r4(最优转速)运行,设置罐体真空压力最优设定范围p3,若真空压力小于设定值p3的时间大于t1,并且通过料位传感器10
‑
4检测罐内物料在设定时间t2内未增加,此时自动将风机转速降到风机运行的最低转速r2,防止未抽吸物料时造成能耗的浪费,当真空压力达到设定值p3或料位传感器10
‑
4检测到罐体内有物料增加,风机转速自动增加到设定值r4。若真空压力小于设定值p3,并且通过料位传感器10
‑
4检测罐内物料在设定时间t2内增加,此时增加风机转速直到真空压力达到设定值p3(风机转速不超过设定值r3)。若罐体内真空压力大于设定值p2时,蜂鸣器14
‑
1蜂鸣,泄压气阀2自动打开t4时间后自动关闭。
96.当控制器12检测到罐体料位报警信号时,会发送信号到蜂鸣器14
‑
1并报警,提醒操作人员罐体存储已接近满罐状态,按下一键停止按键11
‑
6,风机1将会自动关闭,延时t5时间后吸入阀3、防溢阀4自动关闭,此时气动阀开关状态在显示器13上显示。如果操作人员没有及时关闭风机1,控制器12将控制风机转速降到最低转速r2并延时t6时间发送关闭命令到执行单元15风机气阀15
‑
1,风机1自动关闭,延时t5秒后吸入气阀3、防溢气阀4自动关闭,防止将物料吸入风机1造成部件的损坏,气动阀自动关闭防止物料运输过程中进入风机系统给风机1造成损坏。
97.管网堵塞物疏通时选择疏通作业模式,如图4所示,在显示器13上操作选择键选择疏通模式,按下确认键进入工况选择界面,分为工况1(常规)、工况2(软堵塞)和工况3(硬堵
塞),并且显示器13会在每个工况后面显示推荐不同的疏通喷头类型,选择其中一个工况按下确认键,疏通模式选择完成。
98.通过操作单元11自动/手动开关11
‑
4,将开关打到自动模式,控制器12会检测到自动模式信号,当检测到自动模式信号后,控制器12会通过can总线通信于底盘bbm检测发动机转速是否处于怠速状态并自动接收检测单元10水箱液位传感器10
‑
5、液压油低液位传感器10
‑
7、水箱阀关闭11
‑
1所发出的检测信号,控制器12会识别是否有故障报警信号,如若发动机转速非怠速状态,或其中某一个信号有报警,控制器12会通过can总线通信于显示器13显示报警原因,并发出报警信号给报警单元14蜂鸣器14
‑
1并发出蜂鸣,所检测到的报警信号对应水箱液位低报警灯14
‑
3、水箱阀关闭报警灯14
‑
4会同时亮起,控制器12会通过can总线通信于底盘bbm自动将发动机转速降为怠速,按下一键启动按键11
‑
5水泵9不工作,防止动力执行部件的损坏;若发动机转速处于怠速状态并无故障报警信号,按下操控单元11一键启动按键11
‑
5,控制器12将发送开启命令给执行单元15水泵气阀15
‑
2、卷盘前进阀15
‑
3、卷盘速度阀15
‑
5、卷盘卸荷阀15
‑
6,水泵9将按照预存储模式运行,同时疏通软管6前进,检测单元10水泵转速传感器10
‑
1和编码器10
‑
6通信连接于控制器12,控制器12将数据通过can总线发送于显示器13,并显示水泵转速和疏通软管6前进米数。
99.疏通模式工况1(常规)预存储模式:按下一键启动按键11
‑
5,水泵转速、流量自动达到设定值w1(最优值)运行,疏通软管6前进速度达到设定值w2。疏通过程中执行以下两种功能设定:(1)疏通软管6前进过程中,检测单元10编码器10
‑
6将软管前进米数信号发送给控制器12,控制器12在检测到水泵气阀15
‑
2开启信号后,控制器12会根据前进米数和时间计算疏通软管前进速度,当控制器12检测到软管前进速度小于设定值w3时,控制器12将发送指令将水泵转速、水泵流量增加至设定值w4(最大值),疏通软管6前进速度减小到设定值w5,控制器12发送命令给卷盘前进阀15
‑
3,软管前进到所设定米数s1时,卷盘前进阀15
‑
3失电,卷盘后退阀15
‑
4得电;软管后退到所设定米数s1时,卷盘后退阀15
‑
4失电,卷盘前进阀15
‑
3得电,系统循环进行此操作,直到控制器12检测到软管前进速度大于设定值w3时,控制器12将发送指令将水泵转速、水泵流量恢复到设定值w1(最优值)运行,疏通软管6前进速度恢复到设定值w2,疏通软管6前进。(2)通过显示器12可设置疏通软管6前进米数s2,达到设定值s2时,控制器12发送命令到蜂鸣器14
‑
1报警,此时可选择按下禁鸣按键继续疏通作业,或者按下一键停止按键11
‑
6,控制器12发送停止命令到执行单元15水泵气阀15
‑
2、卷盘前进阀15
‑
3、卷盘速度阀15
‑
5、卷盘卸荷阀15
‑
6,水泵9和疏通软管6自动停止,再次按下一键停止按钮11
‑
6,控制器12发送开启命令到卷盘后退阀15
‑
4、卷盘速度阀15
‑
5、卷盘卸荷阀15
‑
6,疏通软管6自动回拉,控制器12接收编码器10
‑
6信号检测为水泵气阀开启15
‑
2信号之前的初始值时,发送关闭信号给卷盘后退阀15
‑
4、卷盘速度阀15
‑
5、卷盘卸荷阀15
‑
6,疏通软管6自动停止。
100.疏通模式工况2(软堵塞)预存储模式:按下一键启动按键11
‑
5,水泵转速、流量自动达到设定值w5(最优值)运行,疏通软管6前进速度达到设定值w6。疏通过程中执行上述序号(1)和(2)两种功能设定。
101.疏通模式工况3(硬堵塞)预存储模式:按下一键启动按键11
‑
5,水泵转速、流量自动达到设定值w7(最优值)运行,疏通软管6前进速度达到设定值w8。疏通过程中执行上述序号(1)和(2)两种功能设定。
102.在疏通模式运行过程中,为保护部件不受损坏,系统将自动执行以下两种保护模式:
103.1).在疏通软管6回拉过程中,软管回拉力传感器10
‑
3自动检测拉力是否大于设定值l1,如若大于设定值l1,控制器12将报警信号和停止信号分别发送给蜂鸣器14
‑
1和卷盘后退阀15
‑
4,此时蜂鸣器14
‑
1蜂鸣,疏通管回拉力报警灯14
‑
5亮起,控制器12发送关闭命令到卷盘后退阀15
‑
4、卷盘速度阀15
‑
5、卷盘卸荷阀15
‑
6,疏通软管6停止,控制器12发送开启命令到卷盘前进阀15
‑
3、卷盘速度阀15
‑
5、卷盘卸荷阀15
‑
6,疏通软管6前进到设定值s3停止,待晃动疏通软管(解决疏通喷头卡住问题),再次按下一键停止按钮11
‑
6,疏通软管6继续回拉,直到控制器12检测到编码器10
‑
6为水泵气阀15
‑
2开启信号之前的初始值时停止,保护由于疏通软管6回拉力过大导致部件损坏。
104.2).在设备运行中,水箱液位传感器10
‑
4会检测水箱8状态,水箱8缺水时水箱液位传感器10
‑
4会发送信号到控制器12,控制器12会发送信号降低水泵转速至设定值w9,并发送报警信号到蜂鸣器14
‑
1并蜂鸣,提醒操作人员水箱处于缺水状态,手动按下一键停止按键11
‑
6,水泵9和疏通软管6将会自动停止。若操作人员未及时发现报警,控制器12将在检测到水箱液位低10
‑
4信号t7时间后发出停止命令到水泵气阀15
‑
2和卷盘前进阀15
‑
3、卷盘速度阀15
‑
5、卷盘卸荷阀15
‑
6,水泵9和疏通软管6将会自动停止,保护由于水泵9缺水运行造成部件损坏。
105.同时进行抽吸和管网堵塞物疏通时选择联合作业模式,如图4所示,在显示器13上操作选择键选择联合模式,按下确认键进入抽吸介质和疏通工况选择,分别选择其中一个选项,按下确认键,联合模式选择完成。联合作业模式下,启动顺序:先水泵9后风机1。
106.通过操作单元11自动/手动开关11
‑
4,将开关打到自动模式,控制器12会自动检测自动模式信号,当检测到自动模式信号后,控制器12会通过can总线通信于底盘bbm并检测发动机转速是否处于怠速状态并自动接收检测单元9罐体料位传感器10
‑
4、水箱液位传感器10
‑
5、液压油低液位传感器10
‑
7、水箱阀关闭11
‑
1所发出的检测信号,控制器12会识别是否有故障报警信号,如若发动机转速非怠速状态,或其中某一个信号有报警,控制器12会通过can总线通信于显示器13显示报警原因,并发出报警信号给报警单元14蜂鸣器14
‑
1并发出蜂鸣,所检测到的报警信号对应罐体料位报警灯14
‑
2、水箱液位低报警灯14
‑
3、水箱阀关闭报警灯14
‑
4会同时亮起,控制器12会通过can总线通信于底盘bbm自动将发动机转速降为怠速,按下一键启动按键11
‑
5水泵9和风机1不工作,防止动力执行部件的损坏;若发动机转速处于怠速状态并无故障报警信号,按下操控单元11一键启动按键11
‑
5,控制器12将发送开启命令给执行单元15水泵气阀15
‑
2、卷盘前进阀15
‑
3、卷盘速度阀15
‑
5、卷盘卸荷阀15
‑
6,水泵9将按照所选择的预存储模式运行,同时疏通软管6前进,检测单元10水泵转速传感器10
‑
1和编码器10
‑
6通信连接于控制器12,控制器12将数据通过can总线发送于显示器13,并显示水泵转速和疏通软管6前进米数。疏通一段时间后,当再次按下一键启动按键11
‑
5,风机1将按照所选择的预存储模式运行,此时显示器13通过can总线通信将实时显示罐体料位百分比和风机转速,物料将由吸污管5输送到罐体7内。当需要进行水泵9或风机1停止时,按下一键停止按键11
‑
6时间大于t8时为风机1停止,小于t8时为水泵9、疏通软管6停止。当控制器12检测到水泵1停止信号后,再次按下一键停止按键11
‑
6小于t8时,疏通软管6自动回拉,否则执行上一步控制。当控制器12接收编码器10
‑
6信号检测为水泵气阀15
‑
2开启信
号之前的初始值时,发送关闭信号给卷盘后退阀15
‑
4、卷盘速度阀15
‑
5、卷盘卸荷阀15
‑
6,疏通软管6自动停止。
107.本发明的技术效果如下:
108.1.在疏通作业时,控制系统会自动控制疏通软管的前进和后退,并检测管道堵塞情况自动调整水泵转速、流量和疏通软管参数,简化操作步骤,提高工作效率。
109.2.在抽吸作业时,控制系统会自动按照预存储模式开启气动阀和调节风机转速,并根据罐体真空压力和罐体料位变化,自动调节风机转速使之处于最优转速状态,减少功率的损耗。
110.3.联合疏通车设备在进行作业时,根据作业现场不同工况,进行三种作业模式的选择提高了操作的简便性。
111.4.根据现场实际工况,每种作业模式对应不同的运行参数,运行参数匹配度提高,工作效率增加,减少能耗的浪费。
112.5.在风机和水泵启动前,控制系统会自动检测设备故障信息,并发出报警提醒,自动限制启动设备,防止操作人员误操作,造成动力执行部件的损坏。
113.6.风机和水泵在工作时,检测和报警单元会实时检查设备安全值,一旦不满足所设定的安全值,会发出报警,系统会自动停止,防止设备损坏造成损失。
114.以上对本发明的较佳实施进行了具体说明,当然,本发明还可以采用与上述实施方式不同的形式,熟悉本领域的技术人员在不违背本发明精神的前提下所作的等同的变换或相应的改动,都应该属于本发明的保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。