1.本发明涉及水陆两栖机器人技术领域,具体涉及一种水陆两栖清洁机器人的驱动推进器。
背景技术:
2.现有的水陆两栖清洁机器人的驱动方式多采用复合式的方式,采用两套系统来实现水中的推进以及陆地的行走。
3.现有的一体式的两栖推进器中,专利号为cn201910858720.4的中国发明公开了一种摆履一体式仿生两栖推进装置,其同时安装有摆动式仿生推进器和行走履带,二者集成式设计,能够完成适合于水上航行的摆动式仿生推进和适合于陆地行驶的行走履带,能够降低系统复杂度,避免两栖推进系统对两栖运载器内部空间和结构的影响,但是摆动式对电机要求过高,并且运动幅度过大对结构带来不稳定性;专利号为cn201911003067.x的中国发明公开了一种仿生两栖推进器,其利用电机的转动经偏心轮转轴传动输出为摆动部件中偏心轮的转动,带动摆动部件在平面内往复摆动,各偏心轮按一定的相位差布置,实现柔性鳍的类正弦波动,利用一套机构实现水陆两栖推进,结构简明,易于实现,但是该发明对竖直状态下柔性鳍强度要求太高,十分容易损坏;专利号为cn201810808836.2的中国发明公开了一种潮间带藻类清理用两栖无人船,其中设置两栖驱动推进器的作用为整个设备在沙地与水中等工作环境中提供驱动力实现转向与制动等功能,利用蛟龙螺旋滚筒的较强防陷功能,特别适宜在一些极端松软地带行驶,提高了无人船对多种环境的适应性,但其安装较为困难,并且在水中的推进效果同类型产品中相对薄弱。
4.本发明结合蜉蝣生物蠕动行走与dna螺旋形式两种方式,通过结构设计实现推进器水陆两栖功能,以解决以上现有技术中的缺陷。
技术实现要素:
5.本发明要解决的技术问题是提供一种水陆两栖清洁机器人的驱动推进器,能够解决现有技术中水陆两栖机器人的驱动推进器运动幅度过大会对结构带来不稳定性、强度要求太高、安装较为困难、水中的推进效果差的问题。
6.为解决上述技术问题,本发明的技术方案为:包括安装外壳和安装于安装外壳上的旋转机构以及蠕动机构,通过蠕动机构的蠕动产生移动,通过旋转机构进行方向的转换;所述安装外壳具有两个平行设置的壳板,所述壳板之间通过连接板连接固定,所述连接板垂直于壳板设置;所述旋转机构具有第一马达和旋转滚轮,所述第一马达安装于壳板一侧,通过第一马达驱动旋转滚轮转动相应角度以改变旋转滚轮的前进方向;所述蠕动机构设置于安装外壳的两个壳板之间,蠕动机构包括第二马达、驱动凸轮、曲轴、蠕动阵列和尾鳍,所述第二马达为蠕动机构提供前进动力,所述第二马达的输出
轴固定连接有驱动凸轮,通过第二马达驱动曲轴转动,所述安装外壳的两个壳板之间设有与壳板垂直的固定板,所述第二马达的输出轴穿过固定板设置;所述驱动凸轮的外边缘连接有与驱动凸轮连动的曲轴,所述曲轴由弯曲方向相同的弯轴连接而成;所述蠕动阵列包括两组蠕动脊柱,每组蠕动脊柱具有若干蠕动脊柱,每组相邻的蠕动脊柱之间依次转动连接,且两组蠕动脊柱之间通过脊柱杆连接形成蠕动阵列,所述两组蠕动脊柱对称设置于固定板的两侧,且两组蠕动脊柱中,相对应的两个蠕动脊柱的上方和下方之间均通过脊柱杆连接;所述蠕动阵列穿在曲轴外部设置,所述蠕动脊柱均匀分布于曲轴上,所述曲轴位于上方和下方的脊柱杆之间,曲轴转动带动蠕动脊柱相对于曲轴产生径向蠕动,随着曲轴的螺旋运动,蠕动脊柱上下摆动,实现蠕动的机械运动;所述固定板的两侧分别连接有蠕动起始连接件,所述蠕动起始连接件与固定板转动连接,蠕动起始连接件远离固定板的一端与蠕动阵列首端的蠕动脊柱转动连接,蠕动阵列末端的蠕动脊柱连接有尾鳍,所述尾鳍的一侧与蠕动阵列末端的蠕动脊柱固定连接,通过蠕动脊柱的相对曲轴的径向蠕动带动尾鳍摆动;所述蠕动机构的蠕动脊柱的底部以及蠕动脊柱下方之间连接的脊柱杆上固套有橡胶胶套;所述安装外壳的两个壳板的内侧均匀分布有数个槽形凸出物,所述壳板的内侧固定连接有与数个槽形凸出物分别对应设置的数个含槽支杆,所述含槽支杆设于槽形凸出物的空槽内,所述槽形凸出物的内壁面与含槽支杆相切,所述槽形凸出物与蠕动脊柱通过螺栓连接,所述蠕动脊柱带动槽形凸出物与含槽支杆相对滑动。
7.进一步地,所述第一马达设于第一马达放置箱内,所述第一马达放置箱通过支撑板进行支撑,所述支撑板水平设于连接板下方,第一马达的输出轴上套设有主动齿轮;所述支撑板一侧连接有旋转支架,所述旋转滚轮通过滚轮支架安装,所述滚轮支架安装于连接轴的下方,所述连接轴通过连接轴承纵向安装于旋转支架上,所述连接轴上套设有从动齿轮,所述从动齿轮与主动齿轮啮合设置,通过第一马达驱动将动力传到旋转滚轮,带动旋转滚轮转动。
8.进一步地,所述第二马达固定安装于第二马达放置箱内,所述第二马达放置箱安装于安装外壳的连接板底部,且第二马达放置箱设于旋转滚轮的侧面,所述第二马达放置箱与驱动凸轮分别设于固定板的两侧。
9.进一步地,所述固定板的两侧底部分别设有凹槽,固定板两侧连接的蠕动起始连接件的端部分别设于凹槽内,所述蠕动起始连接件与固定板铰接设置。
10.进一步地,所述蠕动脊柱设有蠕动脊柱主体和双耳结构,所述双耳结构包括脊柱上圆弧和脊柱下圆弧,所述双耳结构与蠕动脊柱主体形成三角结构,且脊柱上圆弧和脊柱下圆弧分别设于蠕动脊柱主体的上方和下方;所述每组蠕动脊柱的相邻两个蠕动脊柱之间通过连接块连接,所述连接块的中间为弧形结构,所述弧形结构的一侧的上方和下方分别设有连接耳,连接块通过弧形结构与一个蠕动脊柱铰接,连接块的两个连接耳分别与另一个蠕动脊柱的脊柱上圆弧和脊柱下圆弧固定连接,实现相邻两个蠕动脊柱之间的转动连接;
所述蠕动起始连接件通过连接块与蠕动阵列首端的蠕动脊柱连接,所述连接块与蠕动阵列首端的蠕动脊柱固定连接,连接块中间的弧形结构与蠕动起始连接件远离固定板的一端铰接设置。
11.进一步地,所述尾鳍为扇形柔性体;所述驱动凸轮呈偏心形。
12.进一步地,所述曲轴带动蠕动脊柱实现的径向蠕动位移数值不超过曲轴投影的类正弦函数区间数值。
13.进一步地,所述蠕动脊柱的脊柱上圆弧与脊柱下圆弧之间的夹角为101
°
,所述脊柱上圆弧与脊柱下圆弧以蠕动脊柱的轴对称线上下对称;所述连接块与蠕动脊柱之间的轴对称线与水平线之间的夹角为10
°
。
14.进一步地,所述曲轴与驱动凸轮之间的连接角为60
°
;所述驱动凸轮呈小扇形,最大展开扇形之间的角度为35.75
°
,所述曲轴与驱动凸轮底部焊接连接。
15.采用上述结构后,本发明的优点在于:驱动推进器通过蠕动机构的蠕动产生移动,通过旋转机构进行方向的转换,蠕动机构在陆地上可以自由行走,蠕动机构的尾鳍可在蠕动脊柱相对曲轴的径向蠕动下带动摆动,实现水中的移动,实现水陆两栖清洁机器人的垃圾清理海岸交互,减少人力在水陆之间垃圾清理的麻烦,且对马达的要求不高,结构稳定,不易损坏,水中的推进效果好,实用经济;蠕动机构水下运动激起的波浪小,维持稳定,使得其带动移动的垃圾箱保持平衡,同时减小对水下生物的影响,保护生态;驱动推进器可根据相应的环境调节速度大小以及旋转的角度,既可以行走平坦道路,也可以走阶梯道路,适用性高。
附图说明
16.图1为本发明的结构示意图;图2为本发明的旋转机构的结构示意图;图3为本发明的旋转机构与蠕动机构分布示意图;图4为本发明的蠕动机构的结构示意图;图5为本发明的蠕动脊柱与连接块的连接示意图;图6为本发明的驱动凸轮与曲轴的连接示意图。
具体实施方式
17.为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及具体实施方式,对本发明进行进一步详细说明。下面的实施例可以使本专业的技术人员更全面地理解本发明,但并不因此将本发明限制在所述的实施例范围之中。
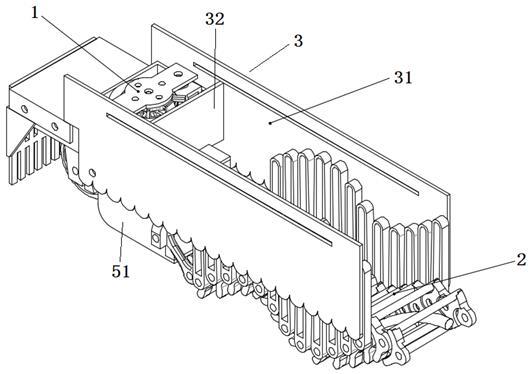
18.如图1所示,本具体实施方式采用如下技术方案:包括安装外壳3和安装于安装外壳3上的旋转机构1以及蠕动机构2,通过蠕动机构2的蠕动产生移动,通过旋转机构1进行方向的转换,安装外壳3的前端呈中空船首状与旋转机构1连接,旋转机构1设于首端,蠕动机构2设于旋转机构1的后方。
19.安装外壳3具有两个平行设置的壳板31,壳板31之间通过连接板32连接固定,连接板32垂直于壳板31设置。
20.如图2所示,旋转机构1具有第一马达11和旋转滚轮19,第一马达11安装于壳板31一侧,通过第一马达11驱动旋转滚轮19转动相应角度以改变旋转滚轮19的前进方向,第一马达11设于第一马达放置箱15内,第一马达放置箱15通过支撑板进行支撑,支撑板水平设于连接板32下方,第一马达11的输出轴上套设有主动齿轮17,支撑板一侧连接有旋转支架12,旋转滚轮19通过滚轮支架18安装,滚轮支架18安装于连接轴14的下方,连接轴14通过连接轴承13纵向安装于旋转支架12上,连接轴14上套设有从动齿轮16,从动齿轮16与主动齿轮17啮合设置,第一马达11驱动主动齿轮17转动,带动从动齿轮16转动,从而带动连接轴14转动,旋转支架12作为支撑,连接轴14转动带动旋转滚轮19转动,通过第一马达11驱动将动力传到旋转滚轮19,带动旋转滚轮19转动。
21.如图3和图4所示,蠕动机构2设置于安装外壳3的两个壳板31之间,蠕动机构2包括第二马达21、驱动凸轮23、曲轴24、蠕动阵列25和尾鳍28,第二马达21为蠕动机构2提供前进动力,第二马达21固定安装于第二马达放置箱22内,第二马达放置箱22安装于安装外壳3的连接板32底部,且第二马达放置箱22设于旋转滚轮19的侧面,第二马达21的输出轴固定连接有驱动凸轮23,安装外壳3的两个壳板31之间设有与壳板31垂直的固定板51,第二马达21的输出轴穿过固定板51设置,第二马达放置箱22与驱动凸轮23分别设于固定板51的两侧,如图6所示,驱动凸轮23的外边缘连接有与驱动凸轮23连动的曲轴24,曲轴24与驱动凸轮23底部焊接连接,通过第二马达21驱动曲轴24转动。
22.驱动凸轮23的设计原理如下:驱动凸轮23展开半径随展开角度的变化规律,0
°
到360
°
之间所对应的半径范围是100mm到160mm,根据该蠕动结构比例缩放,选择最大展开扇形之间的角度为35.75
°
,该角度的主要优点如下:该角度参数满足运动性能要求,该角度的凸轮型线最大允许跃度值降低,最小弹簧裕度值提升到合理的范围内,提高机构灵活性和可靠性,该角度适合中高速功率机构强度。
23.曲轴24由弯曲方向相同的弯轴连接而成,曲轴24与驱动凸轮23之间的连接角为60
°
,曲轴24外观光滑,它还突出了高精度、特殊材料的输出,促进了它的实用性,在有限元分析的实例中,将曲轴24与驱动凸轮23之间的连接角从45
°
增加到75
°
,在同一种工况下,所受的变形与应力都是先减小后增大,只有在角度为60
°
的情况下,所受的应力与变形达到最小,曲轴24结构外部直径与结构本身的直径比例为80:1,具有较好强度与刚度,曲轴片硬度高,耐磨性好,沿其外硬度差,容易在使用中磨损,增加使用寿命。
24.蠕动阵列25包括两组蠕动脊柱26,每组蠕动脊柱26具有若干蠕动脊柱26,每组相邻的蠕动脊柱26之间依次转动连接,且两组蠕动脊柱26之间通过脊柱杆27连接形成蠕动阵列25,两组蠕动脊柱26对称设置于固定板51的两侧,且两组蠕动脊柱26中,相对应的两个蠕动脊柱26的上方和下方之间均通过脊柱杆27连接。
25.如图5所示,蠕动脊柱26设有蠕动脊柱主体263和双耳结构,双耳结构包括脊柱上圆弧261和脊柱下圆弧262,双耳结构与蠕动脊柱主体263形成三角结构,且脊柱上圆弧261和脊柱下圆弧262分别设于蠕动脊柱主体263的上方和下方,蠕动脊柱26的脊柱上圆弧261与脊柱下圆弧262之间的夹角为101
°
,脊柱上圆弧261与脊柱下圆弧262以蠕动脊柱26的轴对称线上下对称。
26.脊柱上圆弧261与脊柱下圆弧262的夹角为101
°
,以中心线为上下对称,材料可以得到充分的利用,从而减轻了重量、降低成本,经过有限元分析测试后,在同一个外力施加
的情况下,角度从50
°
变化到150
°
范围内,形成的变形先增大再减小,只有在101
°
的工况下所受到的整体变形最小,所受的局部应力最小,该角度的主要益处为,在该角度的情况下具有最佳的受力性能,整体结构在对称情况下稳定,此外还具有充分利用空间与材料的特点。
27.每组蠕动脊柱26的相邻两个蠕动脊柱26之间通过连接块29连接,连接块29中间为弧形结构,弧形结构的一侧的上方和下方分别设有连接耳,连接块29通过弧形结构与一个蠕动脊柱26铰接,连接块29的两个连接耳分别与另一个蠕动脊柱26的脊柱上圆弧261和脊柱下圆弧262固定连接,实现相邻两个蠕动脊柱26之间的转动连接,连接块29与蠕动脊柱26之间的轴对称线与水平线之间夹角为10
°
。
28.蠕动阵列25穿在曲轴24外部设置,蠕动脊柱26均匀分布于曲轴24上,曲轴24位于上方和下方的脊柱杆27之间,驱动凸轮23为偏心形状轮,通过驱动凸轮23的旋转,带动固连其的曲轴24进行旋转,从而与蠕动阵列25中的脊柱杆27产生摩擦力,从而带动蠕动脊柱26随着脊柱杆27紧跟曲轴24上下摆动,随着曲轴24的螺旋运动,蠕动脊柱26上下摆动,实现蠕动的机械运动,从而提供运动的动力,曲轴24带动蠕动脊柱26实现的径向蠕动位移数值不超过曲轴24投影的类正弦函数区间数值。
29.固定板51的两侧分别连接有蠕动起始连接件52,蠕动起始连接件52与固定板51转动连接,固定板51的两侧底部分别设有凹槽,固定板51两侧连接的蠕动起始连接件52的端部分别设于凹槽内,蠕动起始连接件52与固定板51铰接设置。
30.蠕动起始连接件52通过连接块29与蠕动阵列25首端的蠕动脊柱26连接,连接块29与蠕动阵列25首端的蠕动脊柱26固定连接,连接块29中间的弧形结构与蠕动起始连接件52远离固定板51的一端铰接设置。
31.蠕动起始连接件52远离固定板51的一端与蠕动阵列25首端的蠕动脊柱26转动连接,蠕动阵列25末端的蠕动脊柱26连接有尾鳍28,尾鳍28的一侧与蠕动阵列25末端的蠕动脊柱26固定连接,通过蠕动脊柱26的相对曲轴24的径向蠕动带动尾鳍28摆动,实现水中的前进,尾鳍28为扇形柔性体。
32.蠕动机构2的蠕动脊柱26的底部以及蠕动脊柱26下方之间连接的脊柱杆27上固套有橡胶胶套33,橡胶胶套33固套在蠕动机构2外形成类密封体。
33.安装外壳3的两个壳板31内侧均匀分布有数个槽形凸出物35,壳板31内侧固定连接有与槽形凸出物35分别对应设置的含槽支杆34,含槽支杆34设于槽形凸出物35的空槽内,槽形凸出物35内壁面与含槽支杆34相切,槽形凸出物35与蠕动脊柱26通过螺栓连接,蠕动脊柱26带动槽形凸出物35与含槽支杆34相对滑动,槽形凸出物35上套有轴承,与含槽支杆34连接时起减小摩擦和支撑作用。
34.工作原理:本发明的驱动推进器通过蠕动机构2的蠕动产生移动,通过旋转机构1进行方向的转换,蠕动机构2在陆地上可以自由行走,蠕动机构2的尾鳍28可在蠕动脊柱26相对曲轴24的径向蠕动下带动摆动,实现水中的移动,实现水陆两栖清洁机器人的垃圾清理海岸交互,减少人力在水陆之间垃圾清理的麻烦,且对马达的要求不高,结构稳定,不易损坏,水中的推进效果好,实用经济;蠕动机构2水下运动激起波浪小,维持稳定,使得其带动移动的垃圾箱保持平衡,同时减小对水下生物的影响,保护生态;第一马达11和第二马达21的输出转速可调节,驱动推进器可根据相应的环境调节速度大小以及旋转角度,既可行走平坦道路,也可走阶梯道路,适用性高。
35.以上显示和描述了本发明的基本原理和主要特征以及本发明的优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是说明本发明的原理,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内。本发明要求保护范围由所附的权利要求书及其等效物界定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。