技术特征:
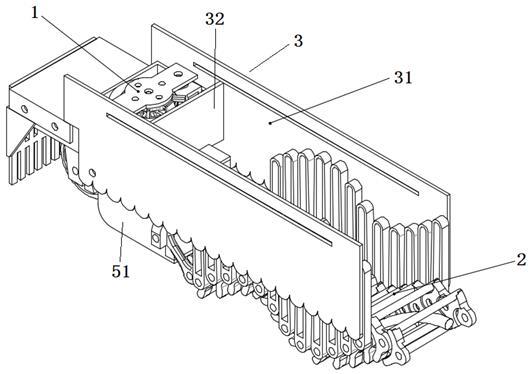
1.一种水陆两栖清洁机器人的驱动推进器,其特征在于:包括安装外壳和安装于安装外壳上的旋转机构以及蠕动机构,通过蠕动机构的蠕动产生移动,通过旋转机构进行方向的转换;所述安装外壳具有两个平行设置的壳板,所述壳板之间通过连接板连接固定,所述连接板垂直于壳板设置;所述旋转机构具有第一马达和旋转滚轮,所述第一马达安装于壳板一侧,通过第一马达驱动旋转滚轮转动相应角度以改变旋转滚轮的前进方向;所述蠕动机构设置于安装外壳的两个壳板之间,蠕动机构包括第二马达、驱动凸轮、曲轴、蠕动阵列和尾鳍,所述第二马达为蠕动机构提供前进动力,所述第二马达的输出轴固定连接有驱动凸轮,通过第二马达驱动曲轴转动,所述安装外壳的两个壳板之间设有与壳板垂直的固定板,所述第二马达的输出轴穿过固定板设置;所述驱动凸轮的外边缘连接有与驱动凸轮连动的曲轴,所述曲轴由弯曲方向相同的弯轴连接而成;所述蠕动阵列包括两组蠕动脊柱,每组蠕动脊柱具有若干蠕动脊柱,每组相邻的蠕动脊柱之间依次转动连接,且两组蠕动脊柱之间通过脊柱杆连接形成蠕动阵列,所述两组蠕动脊柱对称设置于固定板的两侧,且两组蠕动脊柱中,相对应的两个蠕动脊柱的上方和下方之间均通过脊柱杆连接;所述蠕动阵列穿在曲轴外部设置,所述蠕动脊柱均匀分布于曲轴上,所述曲轴位于上方和下方的脊柱杆之间,曲轴转动带动蠕动脊柱相对于曲轴产生径向蠕动,随着曲轴的螺旋运动,蠕动脊柱上下摆动,实现蠕动的机械运动;所述固定板的两侧分别连接有蠕动起始连接件,所述蠕动起始连接件与固定板转动连接,蠕动起始连接件远离固定板的一端与蠕动阵列首端的蠕动脊柱转动连接,蠕动阵列末端的蠕动脊柱连接有尾鳍,所述尾鳍的一侧与蠕动阵列末端的蠕动脊柱固定连接,通过蠕动脊柱的相对曲轴的径向蠕动带动尾鳍摆动;所述蠕动机构的蠕动脊柱的底部以及蠕动脊柱下方之间连接的脊柱杆上固套有橡胶胶套;所述安装外壳的两个壳板的内侧均匀分布有数个槽形凸出物,所述壳板的内侧固定连接有与数个槽形凸出物分别对应设置的数个含槽支杆,所述含槽支杆设于槽形凸出物的空槽内,所述槽形凸出物的内壁面与含槽支杆相切,所述槽形凸出物与蠕动脊柱通过螺栓连接,所述蠕动脊柱带动槽形凸出物与含槽支杆相对滑动。2.根据权利要求1所述的一种水陆两栖清洁机器人的驱动推进器,其特征在于:所述第一马达设于第一马达放置箱内,所述第一马达放置箱通过支撑板进行支撑,所述支撑板水平设于连接板下方,第一马达的输出轴上套设有主动齿轮;所述支撑板一侧连接有旋转支架,所述旋转滚轮通过滚轮支架安装,所述滚轮支架安装于连接轴的下方,所述连接轴通过连接轴承纵向安装于旋转支架上,所述连接轴上套设有从动齿轮,所述从动齿轮与主动齿轮啮合设置,通过第一马达驱动将动力传到旋转滚轮,带动旋转滚轮转动。3.根据权利要求1所述的一种水陆两栖清洁机器人的驱动推进器,其特征在于:所述第二马达固定安装于第二马达放置箱内,所述第二马达放置箱安装于安装外壳的连接板底
部,且第二马达放置箱设于旋转滚轮的侧面,所述第二马达放置箱与驱动凸轮分别设于固定板的两侧。4.根据权利要求1所述的一种水陆两栖清洁机器人的驱动推进器,其特征在于:所述固定板的两侧底部分别设有凹槽,固定板两侧连接的蠕动起始连接件的端部分别设于凹槽内,所述蠕动起始连接件与固定板铰接设置。5.根据权利要求1所述的一种水陆两栖清洁机器人的驱动推进器,其特征在于:所述蠕动脊柱设有蠕动脊柱主体和双耳结构,所述双耳结构包括脊柱上圆弧和脊柱下圆弧,所述双耳结构与蠕动脊柱主体形成三角结构,且脊柱上圆弧和脊柱下圆弧分别设于蠕动脊柱主体的上方和下方;所述每组蠕动脊柱的相邻两个蠕动脊柱之间通过连接块连接,所述连接块的中间为弧形结构,所述弧形结构的一侧的上方和下方分别设有连接耳,连接块通过弧形结构与一个蠕动脊柱铰接,连接块的两个连接耳分别与另一个蠕动脊柱的脊柱上圆弧和脊柱下圆弧固定连接,实现相邻两个蠕动脊柱之间的转动连接;所述蠕动起始连接件通过连接块与蠕动阵列首端的蠕动脊柱连接,所述连接块与蠕动阵列首端的蠕动脊柱固定连接,连接块中间的弧形结构与蠕动起始连接件远离固定板的一端铰接设置。6.根据权利要求1所述的一种水陆两栖清洁机器人的驱动推进器,其特征在于:所述尾鳍为扇形柔性体;所述驱动凸轮呈偏心形。7.根据权利要求1所述的一种水陆两栖清洁机器人的驱动推进器,其特征在于:所述曲轴带动蠕动脊柱实现的径向蠕动位移数值不超过曲轴投影的类正弦函数区间数值。8.根据权利要求5所述的一种水陆两栖清洁机器人的驱动推进器,其特征在于:所述蠕动脊柱的脊柱上圆弧与脊柱下圆弧之间的夹角为101
°
,所述脊柱上圆弧与脊柱下圆弧以蠕动脊柱的轴对称线上下对称;所述连接块与蠕动脊柱之间的轴对称线与水平线之间的夹角为10
°
。9.根据权利要求1所述的一种水陆两栖清洁机器人的驱动推进器,其特征在于:所述曲轴与驱动凸轮之间的连接角为60
°
;所述驱动凸轮呈小扇形,最大展开扇形之间的角度为35.75
°
,所述曲轴与驱动凸轮底部焊接连接。
技术总结
本发明公开了一种水陆两栖清洁机器人的驱动推进器,它涉及水陆两栖机器人技术领域,包括旋转机构、蠕动机构、安装外壳,旋转机构通过第一马达驱动,蠕动机构通过第二马达驱动,蠕动机构具有与第二马达输出轴固定的驱动凸轮、与驱动凸轮连动的曲轴以及穿过曲轴的蠕动脊柱、蠕动起始连接件、尾鳍,通过第二马达驱动曲轴转动,从而带动蠕动脊柱相对于曲轴产生径向蠕动,从而由转动运动转化成蠕动运动,可通过控制旋转机构、蠕动机构中的第一马达、第二马达实现驱动推进器的转向与移动。本发明的优点在于:蠕动机构在陆地上可以自由行走,尾鳍可摆动,实现水中移动,实现水陆两栖清洁机器人的垃圾清理海岸交互,结构稳定,水中的推进效果好。效果好。效果好。
技术研发人员:窦培林 赵世发 施琦 李秀 容学苹 任陈鸿 张晓柳 徐瑞 杨豪杰
受保护的技术使用者:江苏科技大学海洋装备研究院
技术研发日:2021.09.06
技术公布日:2021/12/3
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。