1.本发明涉及神经中枢训练装置领域,具体是一种神经中枢病理反射检测训练装置。
背景技术:
2.对于神经中枢的病理反射检测手段而言,手动检测操作是不可或缺的检测方法,当患者神经中枢的锥体束发生损伤时,会直接对患者神经中枢所产生的运动行为造成影响,对于医生而言,对患者进行神经中枢病理反射检测,能够得知患者对应的神经中枢受损病状,进而反应出患者神经中枢的受损情况。当然对于神经中枢病理反射检测方法而言,虽然在现代社会有很多先进仪器能够进行检测,但是传统中医方法以及中医医院中的资深医师,均能够熟练掌握手动检测方法。对于年轻医师而言,如果能够熟练掌握神经中枢病理反射检测方法,当出现车祸这些可能对神经中枢造成损伤的事故时,医师能够根据手动检测所得到的结果,判断患者受伤部位,进而避免在对患者进行运输时对患者造成二次损伤。但是很多年轻医师经验较少,致使在神经中枢病理反射检测方法上不能够熟练掌握,致使一些年轻医师在碰到一些紧急患者时,只能够依据医疗检测设备给出的检测结果进行诊断治疗,致使错过患者的最佳治疗时期,不利于患者后续的康复问题。
3.基于上述问题,需要设计一种用于神经中枢病理反射检测训练装置,基于人体的正常生理结构,使训练者能够熟练并准确掌握神经中枢病理反射检测方法,进而增加年轻医师对神经中枢受损病状的理解程度,使得年轻医师能够应对一些紧急事故的发生。
技术实现要素:
4.本发明的目的在于提供一种神经中枢病理反射检测训练装置,它能够使年轻医师,即训练者掌握对神经中枢病理反射检测的手动方法,进而加强年轻医师的诊断经验,使得年轻医师在应对一些应急事情时,能够熟练并准确的对患者进行手动检测。
5.本发明为实现上述目的,通过以下技术方案实现:
6.一种神经中枢病理反射检测训练装置,其特征在于:包括人体下肢模型、驱动件、检测件和plc集控系统,所述驱动件、检测件均设置在下肢模型上,且与所述plc集控系统相连接;
7.所述驱动件设置在人体下肢模型上,用于驱动人体下肢模型内的关节进行移动;
8.所述检测件包括
9.第一检测件,所述第一检测件为压力感应件,所述压力感应件设置在人体下肢模型的腓肠肌部位,且与所述驱动件相连接;
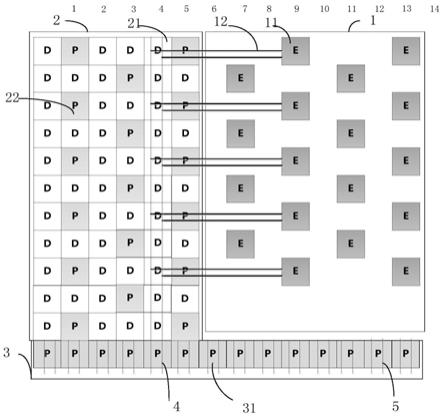
10.第二检测件,所述第二检测件包括主电路线、副电路线、感应器,所述副电路线弧形设置在人体下肢模型的脚底位置,且与感应器串联连接,所述主电路线配合设置在副电路线外侧,且所述主电路线与副电路线后,所述主电路线、副电路线、感应器与电源之间形成闭合回路;
11.第三检测件,所述第三检测件为滑杆件、触点感应板,所述滑杆件设置在所述人体下肢模型的胫骨处,且两个所述触点感应板配合设置在所述滑杆件的两端位置。
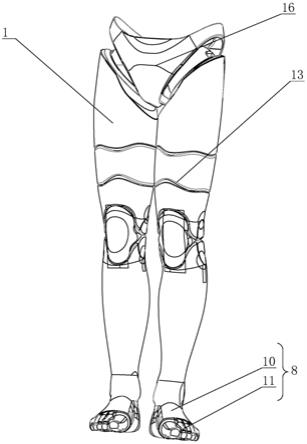
12.所述人体下肢模型包括仿生肌肉表皮和仿生骨件13;所述仿生骨件13包括脚部骨件和腿部骨件,所述脚部骨件包括脚掌骨件和脚趾骨件,所述脚掌骨件与脚趾骨件之间通过万向球限位铰接结构进行连接;所述腿部骨件与脚掌骨件之间铰接,所述腿部骨件的大腿骨件与小腿骨件之间铰接设置,且所述大腿骨件的另一端铰接连接有胯骨骨件。
13.所述驱动件为电动转轴,所述电动转轴设置在所述人体下肢模型的关节连接部位,且每个所述电动转轴均与plc集控系统相连接,控制人体下肢模型的关节进行转动。
14.每个所述脚趾骨件上均设置有电磁铁,且每个所述电磁铁均与所述plc集控系统相连接。
15.所述万向球限位铰接结构包括两个连接端坐,且两个所述连接端坐交错铰接设置在同一个球体上,其中一个所述连接端坐与脚掌骨件相连接,且连接端坐与球体的铰接轴连接有驱动件;另一个所述连接端坐上连接设置有电磁铁。
16.所述脚掌骨件外侧的仿生肌肉表皮设置有弧状槽,且所述弧状槽与所述副电路线配合设置,所述主电路线配合设置在弧状槽内部,按压弧状槽外侧的仿生肌肉表皮能够使主电路线与副电路线相接触。
17.所述滑杆件包括滑杆和滑块,所述滑块套接设置在所述滑杆上,在滑杆上前后移动,且所述滑块的滑动前后两端面上设置有撞击垫块。
18.还包括报警件,所述报警件与plc集控系统相连接;所述报警件为led警示灯和/或声音警示器,所述plc集控系统将检测件检测到的信息传递给报警件后,报警件发出警示。
19.对比现有技术,本发明的有益效果在于:
20.本装置设置的检测件中包括的第一检测件、第二检测件、第三检测件能够分别对神经中枢受损时所产生的各个病理反射病症进行检测模拟,使得训练者在对指定的检测件进行准确的刺激操作时,plc集控系统能够接收到检测件所传递的检测信号,并控制驱动件实现人体下肢模型进行病理反射时所产生的病症状况,进而使训练者能够熟练掌握对神经中枢病理反射的检测方法。
附图说明
21.附图1是本发明结构示意图。
22.附图2是本发明结构示意图。
23.附图3是本发明部分结构示意图。
24.附图4是本发明第三检测件结构示意图。
25.附图5是本发明万向球限位铰接结构示意图。
26.附图6是本发明脚掌骨件结构示意图。
27.附图7是本发明脚掌骨件结构示意图。
28.附图8是神经中枢病理反射病症检查方法示意图。
29.附图中所示标号:
30.1、人体下肢模型;2、压力感应件;3、主电路线;4、副电路线;5、滑杆件;6、触点感应板;7、仿生肌肉表皮;8、脚部骨件;9、腿部骨件;10、脚掌骨件;11、脚趾骨件;12、万向球限位
铰接结构;13、仿生骨件;14、大腿骨件;15、小腿骨件;16、胯骨骨件;17、电动转轴;18、电磁铁;19、连接端坐;20、球体;21、弧状槽;22、滑杆;23、滑块;24、撞击垫块。
具体实施方式
31.下面结合具体实施例,进一步阐述本发明。应理解,这些实施例仅用于说明本发明而不用于限制本发明的范围。此外应理解,在阅读了本发明讲授的内容之后,本领域技术人员可以对本发明作各种改动或修改,这些等价形式同样落于本技术所限定的范围。
32.因为对于神经中枢的病理反射检测方法而言,需要检测医师具备十分精准的检测手法,对患者脚部的指定位置,沿指定的路径进行按压或者滑动,才能够使患者准确的做出反射条件,使得医师根据患者所做出的反射条件来判断患者的具体病状,并根据病症来判断患者神经中枢受损的严重程度。对于常见的神经中枢受损所引发的病状,包括巴彬斯基征、戈登征、查多克征、奥本海姆征,这些病状均代表神经中枢系统出现问题,虽然不能够直接反应神经中枢受损部位,但是能够提供给医师较大的临床价值,使得医师做出指定的治疗反应。对于上述病状的手动检测方法而言,包括下述:1.巴彬斯基征:患者仰卧位,用一钝尖刺激物刺划病人的足外侧缘,由足跟向前至小趾根部再转向内侧,引起拇趾背伸,其余四趾屈及扇形展开,称“开扇征”,是典型的巴彬斯基征阳性表现。2.戈登征:患者平卧,检查者用于挤捏腓肠肌,出现拇趾背屈为阳性。其临床意义同巴彬斯基征。3.查多克征:患者平卧位,双下肢伸直,用一钝尖物由后向前轻划足背外侧部皮肤出现足拇趾背屈,即为阳性。其敏感性与临床意义与巴彬斯基征相同。4.奥本海姆征:检查者用拇指和食指沿病人胫骨前自上而下加压推移,其反射和巴彬斯基征相同,其临床意义也相同。并且,如说明书附图图8所示,为上述神经中枢受损时所引发的病理反射检测示意图,可以看出,在对患者的腿部进行按压以及滑动时,其按压位置以及按压方法是指定的,因此对于本装置而言,使训练者能够熟练掌握神经中枢病理反射检测时的按压位置,以保障医师能够熟练掌握该检测方法。
33.本发明所述是一种用于神经中枢病理反射检测训练装置,主体结构包括人体下肢模型1、驱动件、检测件和plc集控系统,所述驱动件、检测件均设置在下肢模型上,且与所述plc集控系统相连接;因为本装置要准确的模拟出医师在进行神经中枢的手动检测时,能够使人体下肢模型1做出指定的反应,使医师根据人体下肢模型1所表现出的反应,进行神经中枢病理反射的病状判断,进而使医师能够熟练的掌握神经中枢病症的手动检测方法。首先对于本装置而言,在人体下肢模型1的基础上设置连接的驱动件、检测件和plc集控系统相互配合,对医师的操作手法是否正确做出判断。
34.在此基础上,首先对本装置在人体下肢模型1基础上设置的驱动件进行描述:
35.所述人体下肢模型1包括仿生肌肉表皮7和仿生骨件13;所述仿生骨件13包括脚部骨件8和腿部骨件9,所述脚部骨件8包括脚掌骨件10和脚趾骨件11,所述脚掌骨件10与脚趾骨件11之间通过万向球限位铰接结构12进行连接;对于万向球限位铰接结构12而言,进行进一步描述,即:所述万向球限位铰接结构12包括两个连接端坐19,且两个所述连接端坐19交错铰接设置在同一个球体20上,其中一个所述连接端坐19与脚掌骨件10相连接,且连接端坐19与球体20的铰接轴连接有驱动件;另一个所述连接端坐19上连接设置有电磁铁18。如说明书附图图5所示,连接有电磁铁18的连接端坐19和连接有脚掌骨架的连接端坐19能够在两个方向上实现转动,进而模拟出患者脚趾前后方向上的弯曲运动和左右方向上的扩
张运动。
36.所述腿部骨件9与脚掌骨件10之间铰接,所述腿部骨件9的大腿骨件14与小腿骨件15之间铰接设置,且所述大腿骨件14的另一端铰接连接有胯骨骨件16。进而模拟出患者腿部与脚部之间的运动方式,以方便医师进行检测观察。
37.对于本装置的驱动件而言,进行下述设置:
38.所述驱动件设置在人体下肢模型1上,用于驱动人体下肢模型1内的关节进行移动;所述驱动件为电动转轴17,所述电动转轴17设置在所述人体下肢模型1的关节连接部位,且每个所述电动转轴17均与plc集控系统相连接,控制人体下肢模型1的关节进行转动。在正常情况下,患者神经中枢受到损伤时,人体下肢所做出的反射条件为非条件反射,并且区别于正常人而言是不同的,当医师使用本装置进行训练时,只有正确对检测件进行作用,才能够使驱动件带动人体下肢模型1的各个关节进行移动。对于神经中枢受损的患者而言,在本装置中还需要模拟出患者脚趾向外扩张的运动方式,因此,每个所述脚趾骨件11上均设置有电磁铁18,且每个所述电磁铁18均与所述plc集控系统相连接;当医师正确操作刺激检测件时,plc集控系统控制相临近的电磁铁18靠近端面带有相同的磁极,进而使相临近的两个电磁铁18相互排斥,以模拟出患者脚趾向外扩展的运动方式。
39.使用上述结构能够模拟实现人体下肢模型1的正常运动,进而给检测件的设置提供基础,并且使训练者在使用本装置进行训练时,能够根据plc集控系统给出的信息,使驱动件带动人体下肢模型1的各个关节进行移动。
40.对于本装置的检测件,进行下述设置:
41.对于本装置的检测件而言,需要实现对上述神经中枢受损时所反应出的多种病症分别进行检测方法的模拟,进而使训练者对检测件进行合适的操作后,才能够使检测件将检测信息传递给plc集控系统,使plc集控系统控制驱动件带动人体下肢组件的各个关节进行移动,进而模拟出神经中枢受损患者所反映出的病理反射。因此所述检测件包括第一检测件、第二检测件、第三检测件,用于模拟上述多种病症的检测方法:
42.1.第一检测件,所述第一检测件为压力感应件2,所述压力感应件2设置在人体下肢模型1的腓肠肌部位,且与所述驱动件相连接;对于第一检测件而言,为实现对戈登征的模拟检测而设置的,将压力感应件2设置在人体下肢模型1的腓肠肌部位,当训练者对人体下肢模型1的腓肠肌部位进行挤压,并达到一定的挤压力度时,此时压力感应件2感受到压力值,并将压力信号传递给plc集控系统,使得plc集控系统控制驱动件带动人体下肢模型1进行移动。因此,此处设置的压力感应件2存在感应阈值,即施加给压力感应件2的力超过压力感应件2的设置阈值时,才能够使压力感应件2感受到压力信号。
43.当训练者以大于压力感应件2感应阈值的力度按压压力感应件2时,压力感应件2将压力信息传递给plc集控系统,此时plc集控系统控制驱动件进行移动。即,大腿骨件14与小腿骨件15处的电动转轴17带动大腿骨件14与小腿骨件15进行转动,并且大腿骨件14相对于胯骨骨件16的连接位置发生转动;此时,脚部骨件8与腿部骨件9相连接的电动转轴17带动脚部骨件8朝向腿部骨件9进行转动,即病理反射中的背屈现象。对于脚趾骨架而言,plc集控系统控制各个脚趾骨架上设置的电磁铁18通电,并使临近两个电磁铁18的磁极相通,进而使各个脚趾骨架扇形展开,以表现病理反射的“开扇征”。
44.2.第二检测件,所述第二检测件包括主电路线3、副电路线4、感应器,所述副电路
线4弧形设置在人体下肢模型1的脚底位置,且与感应器串联连接,所述主电路线3配合设置在副电路线4外侧,且所述主电路线3与副电路线4后,所述主电路线3、副电路线4、感应器与电源之间形成闭合回路;此处设置的第二检测件用于模拟检测巴彬斯基征。如说明书附图图8所示,用一钝尖刺激物刺划病人的足外侧缘,由足跟向前至小趾根部再转向内侧,为巴彬斯基征常规检测方法,因此将副电路线4弧形设置在人体下肢模型1的脚底位置,并将主电路线3配合设置在副电路线4外侧,当按压主电路线3时,使主电路线3与副电路线4相接处后,与感应器、电源之间形成闭合回路,此时感应器能够检测流经此闭合回路的电路信息。而当主电路线3沿副电路线4设置的方向进行移动时,此时经过主电路线3和副电路线4的电阻值会发生改变此处可将主电路线3和副电路线4的移动理解为电阻器原理,即电流经过主电路线3和副电路线4的电阻值会发生改变,而为了使这一改变较为明显,因此可以将主电路线3和副电路线4的设置材料选择电阻稍大的材料进行设置,进而使感应器所接受到的电路信息发生改变,并且这一变化是持续性的。但是训练者不能够正确使主电路线3沿副电路线4进行移动时,会出现感应件出现短暂无法接收到电路信息的情况,因此这种情况不能够使plc集控系统控制启动驱动件,无法模拟病理反射的反射条件。
45.所述脚掌骨件10外侧的仿生肌肉表皮7设置有弧状槽21,且所述弧状槽21与所述副电路线4配合设置,所述主电路线3配合设置在弧状槽21内部,按压弧状槽21外侧的仿生肌肉表皮7能够使主电路线3与副电路线4相接触。此处将主电路线3设置在弧状槽21内,为了避免在正常情况下,主电路线3能够轻松触碰副电路线4。当然,传统的检测手法也要求医师以一定的力度进行滑动,因此此处在弧状槽21内设置主电路线3,起到限制主电路线3轻松接触到副电路线4的作用,进而模拟在一定力度的情况下,才能够使主电路线3与副电路线4相接处。
46.对于plc集控系统控制驱动件带动人体下肢模型1进行移动的步骤,如上述驱动方式相同,在此处不作出过多解释。
47.3.第三检测件,所述第三检测件为滑杆件5、触点感应板6,所述滑杆件5设置在所述人体下肢模型1的胫骨处,且两个所述触点感应板6配合设置在所述滑杆件5的两端位置。此处设置的第三检测件用于模拟对奥本海姆征的检测方法。如说明书附图图8所示,对于人体的胫骨而言,其本身是较直的,因此不存在寻找检测位置上的难度,只需要对按压的长度进行限定即可。因为人体胫骨长度较长,使训练者掌握按压起点以及终点位置较为重要。
48.所述滑杆件5包括滑杆22和滑块23,所述滑块23套接设置在所述滑杆22上,在滑杆22上前后移动,且所述滑块23的滑动前后两端面上设置有撞击垫块24。对于本装置设置的滑杆22而言,在使用前将滑块23进行移动,并使滑块23一端的撞击垫块24与其中一个触点感应板6相接处,在使用时,按压滑块23并使滑块23沿滑杆22的方向进行滑动,对另一个触点感应板6发生碰撞,进而使训练者掌握对胫骨处进行按压时的长度。
49.在另一端的触点感应板6感受到碰撞信息后,将碰撞信息传递给plc集控系统,使plc集控系统控制驱动件带动人体下肢模型1进行移动。此处的移动方式与第一检测件带动人体下肢模型1进行移动的情况相同,再次不做过多解释。
50.对于查多克征的检测件设置方式而言,其和巴彬斯基征的检查方法类似,均需要钝物在患者的足部进行指定角度的划动,因此其检测件的设置可以类似第二检测件进行设置,进而实现对查多克征的检查训练手法的练习。
51.对于本装置而言,还设置有报警件:
52.所述报警件与plc集控系统相连接;所述报警件为led警示灯和/或声音警示器,所述plc集控系统将检测件检测到的信息传递给报警件后,报警件发出警示。此处设置的报警件能够起到提示作用,使训练者能够得知自己的操作是否正确,以方便训练者能够熟练掌握检测的操作技巧。
53.因此,一种神经中枢病理反射检测训练装置,能够使年轻医师,即训练者掌握对神经中枢病理反射检测的手动方法,进而加强年轻医师的诊断经验,使得年轻医师在应对一些应急事情时,能够熟练并准确的对患者进行手动检测。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。