1.本实用新型涉及机器人技术领域,尤其是指一种机器人抓取装置。
背景技术:
2.在机械行业清洗零部件是基础工作,所有机械设备制造前均先进行零部件的清洗工作,零部件的清洁度直接影响整个设备的精度,所以对零部件的清洁度要求有了极大的提高,对于目前精密机械零件组装过程中清洁度要求的提高,现有的清洗方式是将零件放入超声波振动清洗机内震动清洗。
3.对铁质零部件清洗时,利用机器人抓取铁质零部件,直接放入清洗设备里进行震动清洗,由于铁质零部件清洗过程中发生震动,使得机器人也随着发生震动,导致机器人内部结构损坏,机器人价格昂贵,维修费用高,生产成本高。
技术实现要素:
4.本实用新型要解决的技术问题是提供一种机器人抓取装置,铁质零部件震动清洗时,弹性部件吸收震动,抓臂本体不发生震动,能够有效保护机器人本体,延长使用寿命,提高密封性,有效保护电磁组和弹性部件。
5.为了解决上述技术问题,本实用新型采用如下技术方案:
6.一种机器人抓取装置,其包括机器人本体、安装于机器人本体自由端的转动驱动部件以及转动设置于转动驱动部件的两个抓臂结构,两个所述抓臂结构相对设置,所述抓臂结构包括抓臂本体、电磁组、防水软体部件和多个弹性部件,所述弹性部件的一端与所述电磁组连接,所述弹性部件的另一端固定于所述抓臂本体,所述防水软体部件为内部中空结构,所述防水软体部件、所述抓臂本体和所述电磁组围设形成密封空间,多个所述弹性部件均设置于所述密封空间内。
7.进一步地,所述电磁组包括防水壳体、铁芯以及导电线圈,所述弹性部件远离所述抓臂本体的一端所述防水壳体连接,所述铁芯设置于所述防水壳体内,所述导电线圈绕设于所述铁芯的外周面。
8.进一步地,所述抓臂本体设有多个安装槽,所述弹性部件远离电磁组的一端限位于所述安装槽。
9.进一步地,所述弹性部件的一端一体延伸设有弯折固定端,所述弯折固定端设有螺丝孔,螺丝穿过所述螺丝孔与所述安装槽的底壁连接。
10.进一步地,所述弹性部件为弹簧。
11.本实用新型的有益效果:对铁质零部件震动清洗时,铁质零部件设置于两个电磁组之间,电磁组导通后带磁性,两个电磁组吸附于铁质零部件的两侧。铁质零部件震动时,弹性部件吸收震动,抓臂本体不发生震动,能够有效保护机器人本体,延长使用寿命,降低生产成本;防水软体部件能够防止清洗液进入,提高密封性,防水性能好,有效保护电磁组和弹性部件。
附图说明
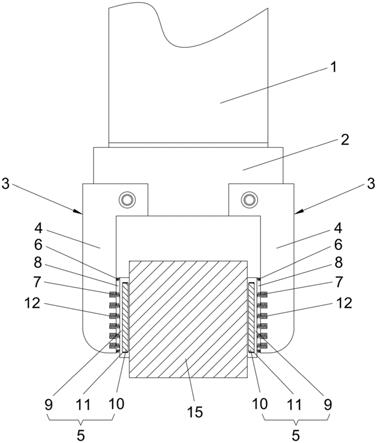
12.图1为本实用新型的整体结构示意图。
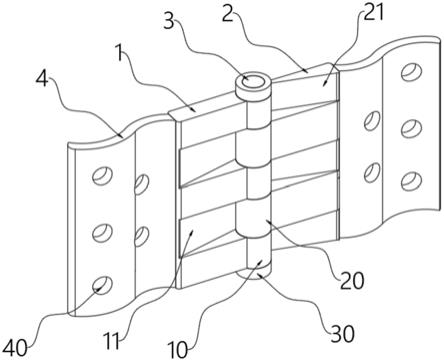
13.图2为本实用新型的弹性部件的结构示意图。
具体实施方式
14.为了便于本领域技术人员的理解,下面结合实施例与附图对本实用新型作进一步的说明,实施方式提及的内容并非对本实用新型的限定。
15.如图1至图2所示,本实用新型提供的一种机器人抓取装置,其包括机器人本体1、安装于机器人本体1自由端的转动驱动部件2以及转动设置于转动驱动部件2的两个抓臂结构3,两个抓臂结构3相对设置,抓臂结构3包括抓臂本体4、电磁组5、防水软体部件6和多个弹性部件7,弹性部件7的一端与电磁组5连接,弹性部件7的另一端固定于抓臂本体4,防水软体部件6为内部中空结构,防水软体部件6、抓臂本体4和电磁组5围设形成密封空间8,多个弹性部件7均设置于密封空间8内。
16.实际运用中,对铁质零部件15震动清洗时,铁质零部件15设置于两个电磁组5之间,电磁组5导通后带磁性,两个电磁组5吸附于铁质零部件15的两侧。铁质零部件15震动时,弹性部件7吸收震动,抓臂本体4不发生震动,能够有效保护机器人本体1,延长使用寿命,降低生产成本。防水软体部件6能够防止清洗液进入,提高密封性,防水性能好,有效保护电磁组5和弹性部件7。
17.本实施例中,电磁组5包括防水壳体9、铁芯10以及导电线圈11,弹性部件7远离抓臂本体4的一端防水壳体9连接,铁芯10设置于防水壳体9内,导电线圈11绕设于铁芯10的外周面。导电线圈11导通后,铁芯10带磁性,能够将铁质零部件15吸附,提高稳定性和可靠性。
18.本实施例中,抓臂本体4设有多个安装槽12,弹性部件7远离电磁组5的一端限位于安装槽12。
19.本实施例中,弹性部件7的一端一体延伸设有弯折固定端13,弯折固定端13设有螺丝孔14,螺丝穿过螺丝孔14与安装槽12的底壁连接。弯折固定端13的设计使得弹性部件7整体安装简单、快速,利用电动螺丝刀将螺丝穿过螺丝孔14后,打入安装槽12的底壁即可,提高工作效率。
20.本实施例中,弹性部件7为弹簧。
21.本实施例中的所有技术特征均可根据实际需要而进行自由组合。
22.上述实施例为本实用新型较佳的实现方案,除此之外,本实用新型还可以其它方式实现,在不脱离本技术方案构思的前提下任何显而易见的替换均在本实用新型的保护范围之内。
技术特征:
1.一种机器人抓取装置,包括机器人本体,其特征在于:还包括安装于机器人本体自由端的转动驱动部件以及转动设置于转动驱动部件的两个抓臂结构,两个所述抓臂结构相对设置,所述抓臂结构包括抓臂本体、电磁组、防水软体部件和多个弹性部件,所述弹性部件的一端与所述电磁组连接,所述弹性部件的另一端固定于所述抓臂本体,所述防水软体部件为内部中空结构,所述防水软体部件、所述抓臂本体和所述电磁组围设形成密封空间,多个所述弹性部件均设置于所述密封空间内。2.根据权利要求1所述的一种机器人抓取装置,其特征在于:所述电磁组包括防水壳体、铁芯以及导电线圈,所述弹性部件远离所述抓臂本体的一端所述防水壳体连接,所述铁芯设置于所述防水壳体内,所述导电线圈绕设于所述铁芯的外周面。3.根据权利要求1所述的一种机器人抓取装置,其特征在于:所述抓臂本体设有多个安装槽,所述弹性部件远离电磁组的一端限位于所述安装槽。4.根据权利要求3所述的一种机器人抓取装置,其特征在于:所述弹性部件的一端一体延伸设有弯折固定端,所述弯折固定端设有螺丝孔,螺丝穿过所述螺丝孔与所述安装槽的底壁连接。5.根据权利要求4所述的一种机器人抓取装置,其特征在于:所述弹性部件为弹簧。
技术总结
本实用新型涉及机器人技术领域,尤其是指一种机器人抓取装置,包括机器人本体、转动驱动部件和抓臂结构,两个抓臂结构相对设置,抓臂结构包括抓臂本体、电磁组、防水软体部件和多个弹性部件,防水软体部件为内部中空结构,防水软体部件、抓臂本体和电磁组围设形成密封空间,多个弹性部件均设置于密封空间内。本申请对铁质零部件震动清洗时,铁质零部件设置于两个电磁组之间,电磁组导通后带磁性,两个电磁组吸附于铁质零部件的两侧。铁质零部件震动时,弹性部件吸收震动,抓臂本体不发生震动,能够有效保护机器人本体,延长使用寿命,降低生产成本;防水软体部件能够防止清洗液进入,提高密封性,有效保护电磁组和弹性部件。有效保护电磁组和弹性部件。有效保护电磁组和弹性部件。
技术研发人员:杨立波
受保护的技术使用者:广东科技学院
技术研发日:2021.06.30
技术公布日:2021/12/3
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。