人工角反射器的地基sar监测输电铁塔变形监测方法
技术领域
1.本发明涉及孔径雷达遥感技术领域,尤其涉及人工角反射器的地基sar监测输电铁塔变形监测方法。
背景技术:
2.近年来,我国输电线路建设不断加快,尤其是超特高压输电线路的建设规模持续增长,截至2018年底,110千伏及以上输电线路总长103.34万千米。高压输电线路途经地区地质环境复杂多样,灾害天气及地质灾害隐患影响着输电线路的安全运行。目前电网运行状态监测主要是传感器在线监测、人工巡检、无人机巡检、直升机巡检、机器人巡检、红外成像测温仪等各种监测方式,这些监测技术在输电铁塔遭受地质灾害影响导致的缓慢微小变形和铁塔倾斜变化的监测方面,还存在不足,难以满足高精度、无接触、远程遥测的需求。
3.近年来,地基sar技术已经成功应用于滑坡变形的实时监测与预警,但是,由于影像分辨率及铁塔目标散射特性的问题,导致大部分输电铁塔难以被地基sar设备远程识别和监测。通过在一些大型建筑物上布设人工角反射器,相关科研人员也已经能够利用地基sar技术开展大型桥梁、超高层建筑的变形监测工作,但是相对于架设在植被高覆盖山区的高压输电铁塔而言,还难以将这些技术简单的移植后用于形变监测,其主要因素是在于铁塔目标在距离较远的情况下难以从地基sar影像中准确的识别与定位,以及需要额外消除铁塔目标本身物理特征(如热膨胀和受微风震动影响)带来的误差相位等。
4.因此,需要一种可以克服上述问题的地基sar监测铁塔目标变形的监测技术。
技术实现要素:
5.本发明的目的在于针对上述现有技术的不足,提供了人工角反射器的地基sar监测输电铁塔变形监测方法,用来准确识别铁塔上的角反射器目标,实现对输电铁塔高精度变形监测。
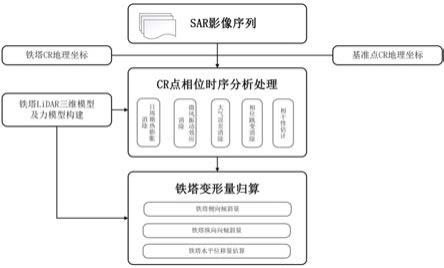
6.为实现上述目的,本发明采用了如下技术方案:本发明提供了基于人工角反射器的地基sar监测输电铁塔变形监测方法,包括以下步骤:s1、获取包含输电铁塔及基准点角反射器的监测区域地基sar时间序列影像数据、测量铁塔cr和基准点cr的地理坐标,作为初始数据输入所述铁塔cr点相位时序分析软件模块,利用sar构像方程计算cr在sar影像中的坐标点位;通过所述坐标点位以确定cr在sar影像中的行列号,公式如下:(1)其中,和分别是传感器和目标点的位置矢量;和分别是传感器和目标点的速度矢量;是雷达波长,通过成像参数得到;是多普勒频率;是传感器到目标点之间的
距离;s2、采用gmt当地时间进行数据分集,每24小时为一个时段,生成一个数据集,所述基准点cr应选择为铁塔周围的稳定点,作为干涉图相位解缠的起点,通过相位解缠获取cr点相位,所述cr点相位包括以下部分: (2)其中,为第t幅干涉图解缠后的cr点相位;为cr的形变相位;为大气相位,通过模型和插值来求解;为热膨胀引起的相位,通过温度及热膨胀系数进行计算;为噪声点引起的相位误差,由于地基sar相干性较好,噪声相位忽略掉。
7.进一步,还包括:s3利用无人机lidar建立监测区域,结合铁塔走向和输电线延伸方向构建铁塔受力模型;所述铁塔受力模型以输电导线的延伸方向为纵向,以在铁塔上假设垂直于导线延伸方向为侧向,进行输电铁塔受力的局部分解;当塔型和线路为直线塔时,所有直线上的铁塔受力的纵向与侧向在同一个坐标系下;当铁塔为转角塔或输电线路延伸方向存在转角时,铁塔的纵向与侧向需要根据前后铁塔方向及导线延伸方向分别进行设定。
8.进一步,基于所述铁塔受力模型和24小时气温变化特征,开展铁塔热膨胀日周期建模分析,提取铁塔热膨胀导致的cr相位周期性变化数据,并建立相应的变形模型,如下式:(3)其中,为该干涉图的时间基线长度;为铁塔的热膨胀系数。
9.进一步,基于所述sar时间sar时间序列影像数据;当sar观测采样间隔较短的情况或场景内大气均质的情况下,利用所述sar影像干涉图序列中的铁塔目标区域外的稳定点的相应信息,构建距离
‑
相位函数模型来模拟大气相位屏,用以消除所述sar影像干涉图中的大气误差,所述距离
‑
相位函数模型为: (4)其中,为第i个稳定像元的解缠相位值;为第i个像元的斜距;为需要求解的大气延迟系数;当sar观测采样间隔较长或场景内大气非匀质的情况下,先利用铁塔和cr目标的强度信息对铁塔和cr目标进行掩膜,并利用铁塔目标区域外的稳定点的滤波相位对铁塔和cr目标的大气相位进行插值,从而消除cr的大气误差。
10.进一步,所述s2中,所述相位解缠为当铁塔变形相位在一个数据集内超过了π/2,则会产生相位跳变,使形变结果失真,采用所述sar时间序列影像数据的相位累计积分和相位跳变估计方法,找出因形变量级导致的相位跳变,准确累计相位模糊度整数,实现铁塔变形量在单个数据集的准确提取。
11.进一步,所述s3中,当塔型和线路为直线塔时,所有直线上的铁塔受力的纵向与侧向在同一坐标系下,当铁塔为沉降受力时,纵向形变由雷达视线向的形变分解转换得
到,转换公式为:(5)其中,为纵向形变;为地基sar波束的仰角;为求解到的cr形变,其计算公式需要结合雷达波长为:(6)当铁塔受横向的牵引力时,其侧向形变可由雷达视线向的形变分解的转换公式为:(7)其中,为侧向形变。
12.本发明的有益效果为:利用地基sar对准固定在输电铁塔上的人工角反射器(cr)进行扫描获取时序sar序列影像,从时间序列影像中利用构像方程提取cr目标所在像元的相位序列,然后采用三维时空相位解缠方法获取角反射器的变形结果,用于铁塔变形监测。在cr数据处理中引入日周期热膨胀模型,大气误差模型,微风振动模型,相位跳变检测算法和相干性迭代分析技术实现铁塔cr点变形相位的准确获取。最后,基于输电导线的延伸方向建立铁塔受力模型,将地基sar获取的变形量分解至二维空间,实现铁塔变形和倾斜的精准计算。
附图说明
13.图1为本发明人工角反射器的地基sar监测输电铁塔变形监测方法的流程图;图2为包含输电铁塔及基准点角反射器的监测区域的sar影像的强度图;图3为铁塔三维lidar点云示意图。
具体实施方式
14.为了使本发明的目的、技术方案及优点更加清楚明白,下面结合附图,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本发明,并不用于限定本发明。
15.请参阅图1,人工角反射器的地基sar监测输电铁塔变形监测方法,包括以下步骤:s1、获取包含输电铁塔及基准点角反射器的监测区域地基sar时间序列影像数据、测量铁塔cr(人工角反射器)和基准点cr的地理坐标,作为初始数据输入所述铁塔cr点相位时序分析软件模块,利用sar构像方程计算所有cr在sar影像中的坐标点位;其中,铁塔cr为放置在铁塔上的cr;基准点cr为放置在基准点的cr。
16.通过所述坐标点位以确定cr在sar影像中的行列号,公式如下:(1)
其中,和分别是传感器和目标点的位置矢量;和分别是传感器和目标点的速度矢量;是雷达波长,通过成像参数得到;是多普勒频率;是传感器到目标点之间的距离;即,结合参数文件可将和转换cr点的行列号。
17.其中,地基sar设备包括发射天线(部分直线式扫描设备,包含天线运行轨道);cr固定在输电铁塔上,并根据地基sar的扫描方位进行适当的调整使得cr的轴心方向对准地基sar波束的方向;s2、采用gmt当地时间进行数据分集,每24小时为一个时段,生成一个数据集,其中,进行数据分集的数据是用地基sar扫描采集得到;请参阅图2,所述基准点cr应选择为铁塔周围的稳定点,作为干涉图相位解缠的起点,通过相位解缠获取cr点相位,所述cr点相位包括以下部分: (2)其中,为第t幅干涉图解缠后的cr点相位;为cr的形变相位;为大气相位,通过模型和插值来求解;为热膨胀引起的相位,通过温度及热膨胀系数进行计算;为噪声点引起的相位误差,由于地基sar相干性较好,噪声相位忽略掉。
18.其中,公式(2)的作用是为了得到,通过所得到的值的大小,来判断铁塔的变型程度。
19.还包括:s3、利用无人机lidar(激光雷达技术)建立监测区域,结合铁塔走向和输电线延伸方向构建铁塔受力模型;所述铁塔受力模型以输电导线的延伸方向为纵向,以在铁塔上假设垂直于导线延伸方向为侧向,进行输电铁塔受力的局部分解;其中,监测区域包括输电铁塔的三维点云模型;当塔型和线路为直线塔时,所有直线上的铁塔受力的纵向与侧向在同一个坐标系下;当铁塔为转角塔或输电线路延伸方向存在转角时,铁塔的纵向与侧向需要根据前后铁塔方向及导线延伸方向分别进行设定。
20.还包括:基于所述铁塔受力模型和24小时气温变化特征,开展铁塔热膨胀日周期建模分析,提取铁塔热膨胀导致的cr相位周期性变化数据,并建立相应的变形模型,如下式:(3)其中,为该干涉图的时间基线长度;为铁塔的热膨胀系数。
21.从而得出公式(2)中,的值。
22.基于所述sar时间sar时间序列影像数据,可得到包括当sar观测采样间隔较短的情况或场景内大气均质的情况和当sar观测采样间隔较长或场景内大气非匀质的情况下;当sar观测采样间隔较短的情况或场景内大气均质的情况下,利用所述sar影像干涉图序列中的铁塔目标区域外的稳定点的相应信息,构建距离
‑
相位函数模型来模拟大气
相位屏,用以消除所述sar影像干涉图中的大气误差,所述距离
‑
相位函数模型为:(4)其中,为第i个稳定像元的解缠相位值;为第i个像元的斜距;为需要求解的大气延迟系数;此为,求解得到公式(2)中,大气相位值;当sar观测采样间隔较长或场景内大气非匀质的情况下,先利用铁塔和cr目标的强度信息对铁塔和cr目标进行掩膜,并利用铁塔目标区域外的稳定点的滤波相位对铁塔和cr目标的大气相位进行插值,从而消除cr的大气误差。
23.本发明的具体实施方式中,由于公式(2)中,干涉图解缠后的cr点相位,通过对原始干涉图进行相位解缠得到。
24.大气相位值通过公式(4)可得到;热膨胀引起的相位值通过公式(3)可得到;噪声点引起的相位误差可忽略掉;通过公式(2)可得到cr的形变相位值。
25.所述s2中,所述相位解缠的处理为:当铁塔变形相位在一个数据集内超过了π/2,则会产生相位跳变,使形变结果失真,采用所述sar时间序列影像数据的相位累计积分和相位跳变估计方法,找出因形变量级导致的相位跳变,准确累计相位模糊度整数,实现铁塔变形量在单个数据集的准确提取。
26.由于铁塔受力主要包括塔型和线路为直线塔时和铁塔为转角塔或输电线路延伸方向存在转角时,请参阅图3,具体的,当塔型和线路为直线塔时,所有直线上的铁塔受力的纵向与侧向在同一坐标系下,当铁塔为沉降受力时,纵向形变由雷达视线向的形变分解转换得到,转换公式为:(5)其中,为纵向形变;为地基sar波束的仰角;为求解到的cr形变,其计算公式需要结合雷达波长为:(6)当铁塔受横向的牵引力时,其侧向形变可由雷达视线向的形变分解的转换公式为:(7)其中,为侧向形变。
27.当铁塔为转角塔或输电线路延伸方向存在转角时的形变,不属于本发明的技术内容,不再进一步阐述。
28.以上所述实施例仅表达了本发明的实施方式,其描述较为具体和详细,但并不能因此而理解为对本发明专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形和改进,这些都属于本发明的保护范围。因此,本发明专利的保护范围应以所附权利要求为准。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。