1.本发明涉及姿态推定装置、传感器模块、计测系统、移动体以及姿态推定方法。
背景技术:
2.已知有如下装置、系统:通过在物体上装配惯性计测装置(imu:inertial measurement unit)并使用惯性计测装置的输出信号来计算物体的位置、姿态。由于在惯性计测装置的输出信号中存在有偏置误差,在姿态计算中也会产生误差,因此提出有使用卡尔曼滤波器来校正这些误差,推定物体的正确的姿态的方法。例如,在专利文献1中,记载有使用角速度传感器的输出来计算对象物的姿态变化量,使用姿态变化量和姿态参数来推定对象物的姿态的姿态推定装置。
3.专利文献1:日本特开2015
‑
179002号公报
技术实现要素:
4.然而,在专利文献1所记载的姿态推定装置中,由于推定对象物的姿态的姿态参数固定,因此存在有如下的问题:在对象物的运动较快的情况下、对象物的运动较慢的情况下,在相同的姿态参数下均难以高精度地进行姿态推定。
5.姿态推定装置根据基于可动体的姿态变化的加速度信息和基于所述可动体的所述姿态变化的角速度信息来推定所述可动体的姿态,所述姿态推定装置具备:存储部,存储所述加速度信息、所述角速度信息以及与所述可动体的运动相关联的多个姿态参数;参数控制部,从所述多个姿态参数中选择选择姿态参数;以及姿态运算部,使用所述加速度信息、所述角速度信息以及所述选择姿态参数来推定所述可动体的姿态。
6.传感器模块具备:上述所记载的姿态推定装置;惯性计测装置,具有检测加速度的加速度传感器、检测角速度的角速度传感器以及对从所述加速度传感器和所述角速度传感器输出的信号进行处理的信号处理部;以及通信部,输出由所述姿态推定装置推定出的所述可动体的姿态信息。
7.计测系统具备:上述所记载的传感器模块;以及主机设备,与所述传感器模块电连接。
8.移动体具备:上述所记载的传感器模块;以及控制装置,基于所述传感器模块推定出的所述可动体的姿态,进行所述可动体的姿态的控制。
9.姿态推定方法包括如下工序:在可动体装配参照用传感器模块;使所述可动体动作而获得参照用姿态输出;在所述可动体装配传感器模块和所述参照用传感器模块;将所述传感器模块的姿态推定所使用的选择姿态参数设定为第一参数;使所述可动体动作而获得第一姿态输出;将所述传感器模块的姿态推定所使用的选择姿态参数设定为第二参数;使所述可动体动作而获得第二姿态输出;以及将所述第一姿态输出和所述第二姿态输出与所述参照用姿态输出进行比较,选择成为接近所述参照用姿态输出的姿态输出的所述选择姿态参数。
10.姿态推定方法包括如下工序:在可动体装配传感器模块;将所述传感器模块的姿态推定所使用的选择姿态参数设定为第一参数;使所述可动体以已知的角度动作而获得第一姿态输出;将所述传感器模块的姿态推定所使用的选择姿态参数设定为第二参数;使所述可动体以所述已知的角度动作而获得第二姿态输出;以及将所述第一姿态输出和所述第二姿态输出与所述已知的角度进行比较,选择成为接近所述已知的角度的姿态输出的所述选择姿态参数。
附图说明
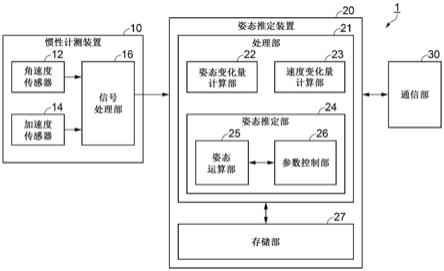
11.图1是表示具备第一实施方式所涉及的姿态推定装置的传感器模块的结构的框图。
12.图2是表示设定参数控制部的姿态参数的方法的流程图。
13.图3是表示传感器模块的姿态推定方法的流程图。
14.图4是表示具备第二实施方式所涉及的姿态推定装置的传感器模块的结构的框图。
15.图5是表示设定参数控制部的姿态参数的方法的流程图。
16.图6是表示具备第三实施方式所涉及的姿态推定装置的传感器模块的结构的框图。
17.图7是表示推定姿态推定装置的可动体的姿态的方法的流程图。
18.图8是表示第四实施方式所涉及的传感器模块的姿态推定方法的流程图。
19.图9是表示具备第五实施方式所涉及的传感器模块的计测系统的结构的框图。
20.图10是表示具备第六实施方式所涉及的传感器模块的移动体的结构的图。
21.图11是表示移动体的结构的框图。
22.图12是表示具备第七实施方式所涉及的传感器模块的移动体的结构的图。
23.图13是表示移动体的结构的框图。
24.附图标记说明
25.1、1a、1b
…
传感器模块;10
…
惯性计测装置;12
…
角速度传感器;14
…
加速度传感器;16
…
信号处理部;20、20a、20b
…
姿态推定装置;21
…
处理部;22
…
姿态变化量计算部;23
…
速度变化量计算部;24
…
姿态推定部;25
…
姿态运算部;26
…
参数控制部;27
…
存储部;28
…
权重系数切换部;30
…
通信部;200
…
计测系统;500、600
…
移动体。
具体实施方式
26.1.第一实施方式
27.首先,参照图1以及图2对具备第一实施方式所涉及的姿态推定装置20的传感器模块1进行说明。
28.如图1所示,本实施方式的传感器模块1具备惯性计测装置10、姿态推定装置20以及通信部30。
29.惯性计测装置10包括角速度传感器12、加速度传感器14以及信号处理部16。
30.角速度传感器12计测相互交叉的、理想上是正交的3轴方向上各自的角速度,输出与计测到的3轴角速度的大小以及朝向相应的模拟信号。
31.加速度传感器14计测相互交叉的、理想上是正交的3轴方向上各自的加速度,输出与计测到的3轴加速度的大小以及朝向相应的模拟信号。
32.信号处理部16进行如下处理:以规定的采样间隔δt对角速度传感器12的输出信号进行采样并转换为数字值的角速度数据。另外,信号处理部16进行如下处理:以规定的采样间隔δt对加速度传感器14的输出信号进行采样并转换为数字值的加速度数据。
33.理想的情况是,角速度传感器12以及加速度传感器14以使各自的3轴与针对惯性计测装置10定义的正交坐标系即传感器坐标系的3轴(x轴、y轴、z轴)一致的方式安装于惯性计测装置10,但是实际上会产生安装角的误差。为此,信号处理部16还进行如下处理:使用根据安装角误差预先计算出的校正参数,将角速度数据以及加速度数据转换为xyz坐标系的数据。进而,信号处理部16还进行如下处理:根据角速度传感器12以及加速度传感器14的温度特性,对角速度数据以及加速度数据进行温度校正。
34.此外,也可以使角速度传感器12以及加速度传感器14具有a/d转换、温度校正的功能。
35.惯性计测装置10将基于信号处理部16处理后的角速度数据以及加速度数据向姿态推定装置20输出。
36.姿态推定装置20包括处理部21和存储部27。姿态推定装置20从存储基于从惯性计测装置10输出的可动体的姿态变化的加速度信息和角速度信息以及与可动体的运动相关联的多个姿态参数的存储部27,使用加速度信息、角速度信息、以及从多个姿态参数中选择出的选择姿态参数,在处理部21中推定作为对象物的可动体的姿态。
37.处理部21包括姿态变化量计算部22、速度变化量计算部23以及姿态推定部24。处理部21依据存储于存储部27的rom或者记录介质中的程序、或者经由网络从服务器接收并存储于存储部27的ram、记录介质中的程序来进行各种处理。特别是在本实施方式中,处理部21通过执行该程序而作为姿态变化量计算部22、速度变化量计算部23、以及姿态推定部24发挥功能,进行如下处理:针对惯性计测装置10以规定的采样间隔输出的角速度数据以及加速度数据进行规定的运算,推定可动体的姿态。此外,惯性计测装置10输出的角速度数据以及加速度数据作为角速度信息以及加速度信息被存储于存储部27。
38.姿态变化量计算部22基于作为角速度传感器12的输出的角速度信息来计算可动体的姿态变化量。具体而言,姿态变化量计算部22进行如下处理:使用由偏置去除部去除了偏置误差所得的3轴角速度,利用以采样间隔为变量的多项式进行近似,从而计算可动体的姿态变化量。
39.速度变化量计算部23基于加速度传感器14的输出即加速度信息和角速度传感器的输出即角速度信息来计算可动体的速度变化量。具体而言,速度变化量计算部23进行如下处理:使用由偏置去除部去除了偏置误差所得的3轴角速度和3轴加速度,计算可动体的速度变化量。
40.姿态推定部24包括姿态运算部25以及参数控制部26。姿态推定部24进行如下处理:使用由姿态变化量计算部22计算出的姿态变化量、由速度变化量计算部23计算出速度变化量、由参数控制部26设定的选择姿态参数,推定可动体的姿态。
41.姿态运算部25使用根据存储于存储部27的加速度信息和角速度信息计算出的姿态变化量以及速度变化量、以及参数控制部26基于存储于存储部27的姿态参数选择信息而
从与可动体的运动相关联的多个姿态参数中选择出的选择姿态参数,推定可动体的姿态。
42.参数控制部26与用户从姿态推定装置20的未图示的输入部输入的模式设定相伴地,基于存储于存储部27中的姿态参数选择信息,从多个姿态参数之中选择与模式设定对应的选择姿态参数,并设定在姿态运算部25中。
43.具体而言,如图2所示,在步骤s11中,当用户设定与可动体的运动相关联的模式时,在步骤s12中,在模式a的情况下,在步骤s13中,基于姿态参数选择信息而从存储部27选择第一参数p1,并将第一参数p1作为选择姿态参数设定在姿态运算部25中。另外,在模式b的情况下,在步骤s14中,基于姿态参数选择信息而从存储部27选择第二参数p2,并将第二参数p2作为选择姿态参数设定在姿态运算部25中。另外,在模式c的情况下,步骤s15中,基于姿态参数选择信息而从存储部27选择第三参数p3,并将第三参数p3作为选择姿态参数设定在姿态运算部25中。
44.此外,在本实施方式中,将可动体的运动被设为可动体的速度,选择姿态参数的不同根据可动体的假定速度v[km/h]之差而不同。
[0045]
例如,第一参数p1是假定速度v为v<x的情况下的参数,第二参数p2是假定速度v为x≤v≤y的情况下的参数,第三参数p3是假定速度v为y<v的情况下的参数。因此,将以假定速度v进行了条件划分的模式和对应的参数建立关联所得的数据成为姿态参数选择信息。
[0046]
存储部27包括存储处理部21用于进行各种处理的程序、用于实现应用功能的各种程序、数据等的rom。
[0047]
另外,存储部27被用作处理部21的作业区域,包括临时存储从rom读出的程序、数据、处理部21依据各种程序执行的运算结果、姿态参数选择信息、以及与可动体的运动相关联的多个姿态参数等。
[0048]
另外,存储部27包括存储通过处理部21的处理而生成的数据中的需要长期保存的数据的非易失性的记录介质。此外,记录介质也可以存储处理部21用于进行各种处理的程序、用于实现应用功能的各种程序、数据等。
[0049]
通信部30能够将由姿态推定装置20推定出的可动体的姿态信息向其他装置等发送,能够接收来自其他装置等的控制信号等。
[0050]
如上所述,在本实施方式的姿态推定装置20中,参数控制部26基于姿态参数选择信息,从与可动体的运动相关联的多个姿态参数中选择选择姿态参数,在姿态运算部25中,使用加速度信息、角速度信息、选择姿态参数来推定可动体的姿态,因此能够根据可动体的运动高精度地推定可动体的姿态。
[0051]
另外,由于本实施方式的传感器模块1具备上述姿态推定装置20,因此能够根据可动体的运动高精度地推定可动体的姿态,并向其他装置发送。
[0052]
接下来,参照图3对使用了具备本实施方式所涉及的姿态推定装置20的传感器模块1的姿态推定方法进行说明。
[0053]
如图3所示,本实施方式所涉及的姿态推定方法包括第一装配工序、参照用输出获取工序、第二装配工序、第一参数设定工序、第一输出获取工序、第二参数设定工序、第二输出获取工序、参数选择工序以及姿态推定工序。
[0054]
1.1第一装配工序
[0055]
首先,在步骤s101中,将具有不受可动体的运动的速度影响的高精度姿态计测功能的参照用传感器模块装配于作为对象物的可动体。
[0056]
1.2参照用输出获取工序
[0057]
接下来,在步骤s102中,使可动体动作,获得参照用姿态输出。
[0058]
1.3第二装配工序
[0059]
接下来,在步骤s103中,对装配有参照用传感器模块的可动体装配传感器模块1。
[0060]
1.4第一参数设定工序
[0061]
接下来,在步骤s104中,将第一参数p1设定为传感器模块1的姿态推定所使用的选择姿态参数。
[0062]
1.5第一输出获取工序
[0063]
接下来,在步骤s105中,使可动体动作,获得根据第一参数p1计算出的第一姿态输出。
[0064]
1.6第二参数设定工序
[0065]
接下来,在步骤s106中,将第二参数p2设定为传感器模块1的姿态推定所使用的选择姿态参数。
[0066]
1.7第二输出获取工序
[0067]
接下来,在步骤s107中,使可动体动作,获得根据第二参数p2计算出的第二姿态输出。
[0068]
1.8参数选择工序
[0069]
接下来,在步骤s108中,将第一姿态输出、第二姿态输出与参照用姿态输出进行比较,选择成为接近参照用姿态输出的姿态输出的选择姿态参数。
[0070]
1.9姿态推定工序
[0071]
接下来,在步骤s109中,设定成为接近参照用姿态输出的姿态输出的选择姿态参数,进行推定可动体的姿态的处理,从而推定可动体的姿态。
[0072]
由于选择成为接近作为基准的参照用姿态输出的姿态输出的选择姿态参数,使用选择出的选择姿态参数来推定可动体的姿态,因此能够更正确地推定可动体的姿态。此外,在本实施方式中,使用两个选择姿态参数来选择成为接近参照用姿态输出的姿态输出的选择姿态参数,但是进行比较的选择姿态参数只要是两个以上即可。若进行比较的选择姿态参数较多,则能够选择成为更接近参照用姿态输出的姿态输出的选择姿态参数。
[0073]
如上所述,由于本实施方式的姿态推定方法是在对接近作为基准的参照用姿态输出的姿态输出的选择姿态参数进行了实测之后进行选择的,因此能够更正确地推定可动体的姿态。
[0074]
此外,在本实施方式的姿态推定方法中,将可动体的速度用作可动部的运动,但是并不局限于此,也可以使用可动体的加速度、角速度、角加速度、停止时间的长度中的任意一个。根据这些,也能够成为更正确地推定可动体的姿态的姿态推定方法。
[0075]
2.第二实施方式
[0076]
接下来,参照图4和图5对具备第二实施方式所涉及的姿态推定装置20a的传感器模块1a进行说明。
[0077]
本实施方式的姿态推定装置20a与第一实施方式的姿态推定装置20相比,除了姿
态推定部24a的结构不同以外,均与第一实施方式的姿态推定装置20相同。此外,以与上述第一实施方式的不同点为中心进行说明,省略相同事项的说明。
[0078]
如图4所示,姿态推定装置20a的姿态推定部24a具有姿态运算部25和参数控制部26a,并进行如下处理:基于来自通信部30的可动体的运动信息即脉冲(pulse)信号,从多个姿态参数中选择选择姿态参数,推定可动体的姿态。此外,pulse信号例如是指是计测作为可动体的车辆的速度所得的车速脉冲信号、从安装于可动体的gps输出的脉冲频率(pps,pulse per second)信号。
[0079]
参数控制部26a基于来自通信部30的可动体的运动信息即pulse信号,从存储于存储部27的多个姿态参数中选择与pulse信号对应的选择姿态参数,并设定在姿态运算部25中。
[0080]
具体而言,如图5所示,在步骤s21中,根据来自通信部30的pulse信号检测速度。在步骤s22中,在假定速度v为v<x的情况下,在步骤s23中,从存储部27选择第一参数p1,并设定在姿态运算部25中。另外,在假定速度v为x≤v≤y的情况下,在步骤s24中,从存储部27选择第二参数p2,并设定在姿态运算部25中。另外,在假定速度v为y<v的情况下,在步骤s25中,从存储部27中选择第三参数p3,并设定在姿态运算部25中。
[0081]
在姿态运算部25中,使用参数控制部26a基于pulse信号选择出的选择姿态参数来运算可动体的姿态。
[0082]
通过设为这样的结构,本实施方式的姿态推定装置20a能够根据可动体的运动信息即pulse信号而自动地选择与可动体的运动相应的最佳的选择姿态参数,因此能够更正确地推定可动体的姿态。
[0083]
3.第三实施方式
[0084]
接下来,参照图6以及图7对具备第三实施方式所涉及的姿态推定装置20b的传感器模块1b进行说明。
[0085]
本实施方式的姿态推定装置20b与第一实施方式的姿态推定装置20相比,除了姿态推定部24b的结构不同以外,均与第一实施方式的姿态推定装置20相同。此外,以与上述第一实施方式的不同点为中心进行说明,省略相同事项的说明。
[0086]
如图6所示,姿态推定装置20b的姿态推定部24b具有第一姿态运算部251、第二姿态运算部252、第三姿态运算部253、参数控制部26b以及权重系数切换部28。姿态推定部24b进行如下处理:基于来自通信部30的可动体的运动信息即pulse信号,选择至少两个姿态参数作为选择姿态参数,并对选择出的姿态参数分别乘以权重系数r,运算可动体的姿态,并将运算出的结果相加,从而推定可动体的姿态。此外,在本实施方式中,作为一个例子,列举选择了三个姿态参数的情况并进行说明。
[0087]
第一姿态运算部251使用对由参数控制部26b选择出的第一参数p1乘以由权重系数切换部28设定的权重系数r所得的姿态参数,运算可动体的姿态。
[0088]
第二姿态运算部252使用对由参数控制部26b选择出的第二参数p2乘以由权重系数切换部28设定的权重系数r所得的姿态参数,运算可动体的姿态。
[0089]
第三姿态运算部253使用对由参数控制部26b选择出的第三参数p3乘以由权重系数切换部28设定的权重系数r所得的姿态参数,运算可动体的姿态。
[0090]
参数控制部26b对从存储于存储部27中的多个姿态参数之中选择出的第一参数p1
乘以由权重系数切换部28设定的与第一参数p1对应的权重系数r,并设定在第一姿态运算单元251中。
[0091]
参数控制部26b对从存储于存储部27中的多个姿态参数之中选择出的第二参数p2乘以由权重系数切换部28设定的与第二参数p2对应的权重系数r,并设定在第二姿态运算单元252中。
[0092]
参数控制部26b对从存储于存储部27中的多个姿态参数之中选择出的第三参数p3乘以由权重系数切换部28设定的与第三参数p3对应的权重系数r,并设定在第三姿态运算单元253中。
[0093]
权重系数切换部28基于来自通信部30的可动体的运动信息即pulse信号,切换针对第一参数p1的权重系数r、针对第二参数p2的权重系数r、以及针对第三参数p3的权重系数r。
[0094]
如图7所示,在姿态推定装置20b中的推定可动体的姿态的处理中,首先,在步骤s31中,根据来自通信部30的pulse信号检测速度。接下来,在步骤s32中,根据假定速度v进行条件划分。
[0095]
在假定速度v为v<x的情况下,在步骤s33中,使用乘以由权重系数切换部28设定的权重系数r1(例如0.6)后的第一参数p1,通过第一姿态运算部251来运算可动体的姿态。接下来,在步骤s34中,使用乘以由权重系数切换部28设定的权重系数r2(例如0.3)后的第二参数p2,通过第二姿态运算部252来运算可动体的姿态。在步骤s35中,使用乘以由权重系数切换部28设定的权重系数r3(例如,0.1)后的第三参数p3,通过第三姿态运算部253来运算可动体的姿态。之后,在步骤s36中,将第一姿态运算部251的运算结果、第二姿态运算部252的运算结果、第三姿态运算部253的运算结果相加而作为可动体的姿态。
[0096]
在假定速度v为x≤v≤y的情况下,在步骤s37中,使用乘以由权重系数切换部28设定的权重系数r4(例如0.2)后的第一参数p1,通过第一姿态运算部251来运算可动体的姿态。接下来,在步骤s38中,使用乘以由权重系数切换部28设定的权重系数r5(例如0.6)后的第二参数p2,通过姿态运算部252来运算可动体的姿态。在步骤s39中,使用乘以由权重系数切换部28设定的权重系数r6(例如0.2)后的第三参数p3,通过第三姿态运算部253来运算可动体的姿态。之后,在步骤s40中,将第一姿态运算部251的运算结果、第二姿态运算部252的运算结果、第三姿态运算部253的运算结果相加而作为可动体的姿态。
[0097]
在假定速度v为y<v的情况下,在步骤s41中,使用乘以由权重系数切换部28设定的权重系数r7(例如0.1)后的第一参数p1,通过第一姿态运算部251来运算可动体的姿态。接下来,在步骤s42中,使用乘以由权重系数切换部28设定的权重系数r8(例如0.3)后的第二参数p2,通过第二姿态运算部252来运算可动体的姿态。在步骤s43中,使用乘以由权重系数切换部28设定的权重系数r9(例如0.6)后的第三参数p3,通过第三姿态运算部253来运算可动体的姿态。之后,在步骤s44中,将第一姿态运算部251的运算结果、第二姿态运算部252的运算结果、第三姿态运算部253的运算结果相加而作为可动体的姿态。
[0098]
通过设为这样的结构,本实施方式的姿态推定装置20b能够根据可动体的运动信息即pulse信号,与可动体的运动相应地动态地切换选择姿态参数的权重系数r,因此能够更正确地推定可动体的姿态。
[0099]
4.第四实施方式
[0100]
接下来,参照图8对第四实施方式所涉及的传感器模块1、1a、1b的姿态推定方法进行说明。此外,在以下的说明中,应用传感器模块1来进行说明。
[0101]
如图8所示,本实施方式所涉及的姿态推定方法包括装配工序、第一参数设定工序、第一输出获取工序、第二参数设定工序、第二输出获取工序、参数选择工序以及姿态推定工序。
[0102]
4.1装配工序
[0103]
首先,在步骤s111中,将传感器模块1装配于作为对象物的可动体。
[0104]
4.2第一参数设定工序
[0105]
接下来,在步骤s112中,将第一参数p1设定为传感器模块1的姿态推定所使用的选择姿态参数。
[0106]
4.3第一输出获取工序
[0107]
接下来,在步骤s113中,使可动体以已知的角度动作,获得根据第一参数p1计算出的第一姿态输出。
[0108]
4.4第二参数设定工序
[0109]
接下来,在步骤s114中,将第二参数p2设定为传感器模块1的姿态推定所使用的选择姿态参数。
[0110]
4.5第二输出获取工序
[0111]
接下来,在步骤s115中,使可动体以已知的角度动作,获得根据第二参数p2计算出的第二姿态输出。
[0112]
4.6参数选择工序
[0113]
接下来,在步骤s116中,将第一姿态输出、第二姿态输出与已知的角度进行比较,选择成为接近已知的角度的姿态输出的选择姿态参数。
[0114]
4.7姿态推定工序
[0115]
接下来,在步骤s117中,设定成为接近已知的角度的姿态输出的选择姿态参数,进行推定可动体的姿态的处理,从而推定可动体的姿态。
[0116]
由于选择成为接近已知的角度的姿态输出的选择姿态参数,并使用选择出的选择姿态参数来推定可动体的姿态,因此能够更正确地推定可动体的姿态。此外,在本实施方式中,使用两个选择姿态参数来选择成为接近已知的角度的姿态输出的选择姿态参数,但是进行比较的选择姿态参数只要是两个以上即可。若进行比较的选择姿态参数较多,则能够选择成为更接近已知的角度的姿态输出的选择姿态参数。
[0117]
如上所述,由于本实施方式的姿态推定方法是在对成为接近已知的角度的姿态输出的选择姿态参数进行实测之后进行选择的,因此能够更正确地推定可动体的姿态。
[0118]
5.第五实施方式
[0119]
接下来,参照图9对具备第五实施方式所涉及的传感器模块1、1a、1b的计测系统200进行说明。此外,在以下的说明中,以应用了传感器模块1的结构为例进行说明。
[0120]
本实施方式所涉及的计测系统200包括传感器模块1和与传感器模块1电连接的主机设备210。另外,能够包括gps接收部220、gps接收用的天线222以及振荡器230。主机设备210能够通过mpu等各种处理器来实现。此外,也可以通过asic的集成电路装置来实现主机设备210。主机设备210包括执行数字信号处理的dsp212和生成时钟信号的时钟信号生成电
路213。
[0121]
gps接收部220经由天线222接收来自gps卫星的信号。即,作为gps载波,接收位置信息叠加而成的卫星信号。gps接收部220是gps接收机,能够通过包括gps的接收电路在内的集成电路装置来实现。主机设备210基于gps接收部220接收到的信号,检测表示移动体等计测对象物的位置、速度、方位的gps定位数据。计测对象物的位置是纬度、经度或者高度等。在该gps定位数据中也包括表示接收状态、接收时刻等的状态数据。另外,主机设备210接收来自传感器模块1的加速度数据以及角速度数据,并对这些数据进行惯性导航运算处理,求出惯性导航定位数据。惯性导航定位数据包括计测对象物的加速度数据以及姿态数据。然后,主机设备210基于求出的惯性导航定位数据和gps定位数据,计算计测对象物的位置等。在计测对象物是汽车等移动体的情况下,计算移动体在地面的哪个位置行驶。此外,这样的计测对象物的位置、姿态的运算处理能够通过使用了dsp212的卡尔曼滤波器处理来实现。
[0122]
振荡器230使用石英振子等振子来生成振荡时钟信号。振荡器230例如是温度补偿型振荡器(tcxo)。或者,作为振荡器230,也可以使用具备恒温槽的恒温槽型振荡器(ocxo)等。时钟信号生成电路213基于来自振荡器230的振荡时钟信号,生成在主机设备210中使用的各种时钟信号。在该情况下,时钟信号生成电路213基于从gps等卫星定位系统获取的信号即时刻基准信号来生成时钟信号。例如,作为时钟信号之一而生成外部同步信号exsyc。
[0123]
主机设备210能够基于在gps接收部220接收到的卫星信号中含有的时刻信息来获取正确的绝对时刻信息。时刻信息为年、月、日、时、分、秒等信息。然后,gps接收部220作为时刻基准信号而输出以秒为单位产生脉冲的pps信号。时钟信号生成电路213由通过来自振荡器230的振荡时钟信号进行动作的pll电路构成,在pll电路中,pps信号作为时钟同步用的基准信号而被输入。然后,pll电路生成与时刻基准信号即pps信号同步的时钟信号。这样,主机设备210将与时刻基准信号同步的外部同步信号exsyc向传感器模块1输出。
[0124]
如上所述,在本实施方式中,外部同步信号exsyc成为基于时刻基准信号而生成的信号。由此,能够使用基于时刻基准信号而生成的外部同步信号exsyc,获取角速度传感器12以及加速度传感器14中的检测数据。即,通过使用基于时刻基准信号而生成的外部同步信号exsyc,能够在正确的时刻进行了同步的定时下,获取来自角速度传感器12以及加速度传感器14的检测电路的检测数据。因而,能够将在正确的时刻进行了同步的恰当的定时下获取的检测数据向信号处理部16输出,能够实现使用传感器模块1计测的信息的高精度化。
[0125]
例如,主机设备210通过使用gps接收部220接收到的卫星信号,能够获取正确的绝对时刻信息。因而,也能够指定外部同步信号exsyc的各同步定时的绝对时刻。而且,从传感器模块1输出在外部同步信号exsyc的同步定时下获取的检测数据。另外,由于从角速度传感器12以及加速度传感器14中的检测数据的获取定时至该检测数据被输入主机装置210的定时为止的延迟时间是基于数字处理的延迟时间,因此主机设备210能够指定该延迟时间的长度即时钟数。因而,主机设备210能够指定从传感器模块1输入的加速度数据、角速度数据等检测数据是在哪个时刻获取的检测数据。而且,如上所述,主机设备210根据基于卫星信号求出的gps定位数据、基于来自传感器模块1的检测数据求出的惯性导航定位数据,计算计测对象物的位置等。因而,由于能够指定加速度数据、角速度数据等检测数据的获取定时的绝对时刻,因此能够正确地计算计测对象物的位置等。
[0126]
另外,在本实施方式中,时刻基准信号例如是从卫星定位系统获取的信号。例如,时刻基准信号是从卫星定位系统获取的pps信号等。这样,能够有效利用卫星定位系统而获取时刻基准信号,能够使用基于所获取的时刻基准信号而生成的外部同步信号exsyc,获取角速度传感器12以及加速度传感器14中的检测数据。
[0127]
6.第六实施方式
[0128]
接下来,参照图10以及图11对具备第六实施方式所涉及的传感器模块1、1a、1b的移动体500进行说明。此外,在以下的说明中,以应用了传感器模块1的结构为例来进行说明。
[0129]
本实施方式所涉及的移动体500包括:上述实施方式的传感器模块1;以及控制装置570,基于传感器模块1的姿态推定装置20推定出的移动体500的姿态信息,控制移动体500的姿态。
[0130]
如图10所示,移动体500具有车体502、车轮504。另外,在移动体500装配有定位装置510,且进行车辆控制等的控制装置570设于内部。另外,如图11所示,移动体500具有:发动机、马达等驱动机构580;盘式制动器、鼓式制动器等制动机构582;以及由方向盘、转向齿轮箱等实现的转向机构584。这样,移动体500具备驱动机构580、制动机构582、转向机构584,是在地上、天空、海上移动的设备、装置。例如,移动体500是农业机械等四轮汽车。
[0131]
定位装置510是装配于移动体500而进行移动体500的定位的装置。定位装置510包括:传感器模块1,具有惯性计测装置10和姿态推定装置20;gps接收部520;以及gps接收用的天线522。姿态推定装置20包括位置信息获取部、位置合成部、运算处理部以及定位处理部。惯性计测装置10具有3轴的加速度传感器14和3轴的角速度传感器12。运算处理部接收来自加速度传感器14、角速度传感器12的加速度数据、角速度数据,并对这些数据进行惯性导航运算处理,输出惯性导航定位数据。惯性导航定位数据是表示移动体500的加速度、姿态的数据。
[0132]
gps接收部520经由天线522接收来自gps卫星的信号。位置信息获取部基于gps接收部520接收到的信号,输出表示装配有定位装置510的移动体500的位置、速度、方位的gps定位数据。位置合成部基于从运算处理部输出的惯性导航定位数据和从位置信息获取部输出的gps定位数据,计算移动体500在地面的哪个位置行驶。例如,即使在gps定位数据中含有的移动体500的位置相同,只要如图10所示那样移动体500的姿态因地面的倾斜(θ)等的影响而不同,则移动体500便在地面的不同位置行驶。因此,仅通过gps定位数据无法计算出移动体500的正确的位置。
[0133]
为此,位置合成部使用惯性导航定位数据中的特别是与移动体500的姿态相关的数据,计算移动体500在地面的哪个位置行驶。从位置合成部输出的位置数据由定位处理部进行规定的处理,并作为定位结果显示于显示部550。另外,也可以是,位置数据被通信部30向外部装置发送。
[0134]
控制装置570控制移动体500的驱动机构580、制动机构582、转向机构584。控制装置570是车辆控制用的控制器,例如能够通过多个控制单元来实现。控制装置570具有:作为进行车辆控制的控制单元的车辆控制部572;作为进行自动驾驶控制的控制单元的自动驾驶控制部574;以及通过半导体存储器等来实现的存储部576。监视装置578是监视移动体500的周边的障碍物等物体的装置,通过周边监控照相机、毫米波雷达或者声纳等来实现。
[0135]
然后,如图11所示,本实施方式的移动体500包括姿态推定装置20和控制装置570。控制装置570基于姿态推定装置20推定出的移动体500的姿态信息,控制移动体500的姿态。例如,姿态推定装置20基于包括来自惯性计测装置10的检测数据的输出信号,如上述那样进行各种处理,求出移动体500的位置、姿态的信息。例如,如上所述,姿态推定装置20能够基于gps定位数据和惯性导航定位数据来求出移动体500的位置的信息。另外,姿态推定装置20例如能够基于在惯性导航定位数据中含有的角速度数据等来推定移动体500的姿态的信息。移动体500的姿态的信息例如能够通过四元数、侧倾角、俯仰角、偏摆角等来表示。然后,控制装置570基于通过姿态推定装置20的处理推定出的移动体500的姿态信息,控制移动体500的姿态。该控制例如由车辆控制部572来进行。该姿态的控制例如能够通过控制装置570对转向机构584进行控制来实现。或者,在滑移控制等使移动体500的姿态稳定化的控制中,控制装置570也可以控制驱动机构580、或者控制制动机构582。根据本实施方式,由于能够通过姿态推定装置20高精度地推定姿态的信息,因此能够实现移动体500的良好的姿态控制。
[0136]
另外,在本实施方式中,控制装置570基于由姿态推定装置20求出的移动体500的位置以及姿态的信息,控制移动体500的加速、制动以及转向中的至少一个。例如,控制装置570能够基于移动体500的位置以及姿态的信息,控制驱动机构580、制动机构582以及转向机构584中的至少一个。
[0137]
由此,例如能够实现基于自动驾驶控制部574的移动体500的自动驾驶控制。在该自动驾驶控制中,除了移动体500的位置以及姿态的信息以外,还使用基于监视装置578的周围的物体的监视结果、存储于存储部576的地图信息、行驶路径信息等。然后,控制装置570基于惯性计测装置10的输出信号的监视结果来切换实施或者不实施移动体500的自动驾驶。例如,姿态推定装置20监视来自惯性计测装置10的检测数据等的输出信号。然后,例如,在基于监视结果检测出惯性计测装置10的检测精度的降低、感应异常的情况下,控制装置570从实施自动驾驶切换为不实施自动驾驶。例如,在自动驾驶中,移动体500的加速、制动以及转向中的至少一个被自动地控制。另一方面,在不实施自动驾驶时,不实施这样的加速、制动、转向的自动控制。由此,关于进行自动驾驶的移动体500的行驶,能够进行可靠性更高的辅助。此外,也可以基于惯性计测装置10的输出信号的监视结果来切换自动驾驶的自动化等级。
[0138]
7.第七实施方式
[0139]
接下来,参照图12以及图13对具备第七实施方式所涉及的传感器模块1、1a、1b的移动体600进行说明。此外,在以下的说明中,以应用了传感器模块1的结构为例来进行说明。
[0140]
上述实施方式的传感器模块1的姿态推定装置20能够有效地应用于建设机械的姿态控制等中,作为移动体600,列举作为建设机械的一例的液压挖掘机来进行说明。
[0141]
如图12所示,在移动体600中,车体由下部行驶体612和能够回转地搭载于下部行驶体612上的上部回转体611构成,在上部回转体611的前部侧设有由能够在上下方向上转动的多个构件构成的作业机构620。在上部回转体611设有未图示的驾驶席,在驾驶席上设有对构成作业机构620的各构件进行操作的未图示的操作装置。而且,在上部回转体611配置有作为检测上部回转体611的倾斜角的倾斜传感器发挥功能的上述实施方式的惯性计测
装置10。
[0142]
作为多个构件,作业机构620具备:起重臂613,以能够进行俯仰动作的方式安装于上部回转体611的前部侧;臂614,以能够进行仰俯动作的方式安装于起重臂613的前端侧;铲斗连杆616,能够转动地安装于臂614的前端侧;铲斗615,能够转动地安装于臂614及铲斗连杆616的前端侧;起重臂缸617,驱动起重臂613;臂缸618,驱动臂614;以及铲斗缸619,经由铲斗连杆616驱动铲斗615。
[0143]
起重臂613的基端侧被上部回转体611支撑为能够在上下方向上转动,通过起重臂缸617的伸缩而驱动起重臂613,使其相对于上部回转体611相对地旋转。而且,在起重臂613配置有作为检测起重臂613的运动的状态的惯性传感器发挥功能的惯性计测装置10c。
[0144]
在起重臂613的前端侧,臂614的一端侧被支撑为能够旋转,通过臂缸618的伸缩而驱动臂614,使其相对于起重臂613相对地旋转。在臂614配置有作为检测臂614的运动的状态的惯性传感器发挥功能的惯性计测装置10b。
[0145]
铲斗连杆616与铲斗615被臂614的前端侧支撑为能够转动,根据铲斗缸619的伸缩而驱动铲斗连杆616,使其相对于臂614相对地旋转,与之联动地,驱动铲斗615,使其相对于臂614相对地旋转。而且,在铲斗连杆616配置有作为检测铲斗连杆616的运动的状态的惯性传感器发挥功能的惯性计测装置10a。
[0146]
惯性计测装置10a、10b、10c能够检测作用于作业机构620的各构件、上部回转体611的角速度以及加速度中的至少一个。另外,如图13所示,惯性计测装置10a、10b、10c串联地连接,能够将检测信号向运算装置630发送。这样,通过将惯性计测装置10a、10b、10c串联地连接,能够减少用于发送可动区域内的检测信号的布线数量,能够获得紧凑的布线构造。通过紧凑的布线构造,布线的铺设方法的选择变得容易,能够降低布线的劣化、损伤等的产生。
[0147]
进而,如图13所示,在移动体600设有运算上部回转体611的倾斜角、构成作业机构620的起重臂613、臂614、铲斗615的位置姿态的运算装置630。如图13所示,运算装置630包括上述实施方式的姿态推定装置20和控制装置632。姿态推定装置20基于惯性计测装置10、10a、10b、10c的输出信号,推定移动体600的姿态信息。控制装置632基于姿态推定装置20推定出的移动体600的姿态信息,控制移动体600的姿态。具体而言,运算装置630输入来自各惯性计测装置10、10a、10b、10c的各种检测信号,基于各种检测信号,运算起重臂613、臂614、铲斗615的位置姿态或者姿态角、上部回转体611的倾斜状态。运算出的包括起重臂613、臂614、铲斗615的姿态角在内的位置姿态信号、包括上部回转体611的姿态角在内的倾斜信号,例如铲斗615的位置姿态信号被用于驾驶席的监视器装置(未图示)的显示、或者用于控制作业机构620、上部回转体611的动作的反馈信息中,进而,经由通信部30向其他装置等发送。
[0148]
此外,作为使用上述实施方式的传感器模块1的姿态推定装置20的建设机械,除了上述示例的液压挖掘机(挖车、反铲挖土机、动力挖掘机)以外,例如,还具有越野起重机(起重车)、推土机、挖掘/装载机、轮式装载机、高空作业车(升降车)等。
[0149]
根据本实施方式,由于通过传感器模块1的姿态推定装置20,能够高精度地求出姿态的信息,因此能够实现移动体600的良好的姿态控制。另外,根据移动体600,由于装配有紧凑的惯性计测装置10,因此能够提供如下的建设机械,例如,即使在铲斗连杆616等的极
其有限的狭窄的区域内,也能够在惯性计测装置10的每个设置部位以串联连接(多连接)的方式紧凑地配置多个惯性计测装置、或者使通过电缆串联地连接设置于各部位的惯性计测装置10彼此的电缆的引绕变得紧凑。
[0150]
此外,在本实施方式中,作为使用传感器模块1的姿态推定装置20的移动体,以农业机械等四轮汽车、建设机械为例进行了说明,但是除此以外,还具有摩托车、自行车、电车、飞机、双足步行机器人、或者无线电控制飞机、无线电控制直升机、无人机等远程操纵或者自主式的飞行体、火箭、人造卫星、船舶、agv(无人搬运车)等。
[0151]
另外,作为使用传感器模块1的姿态推定装置20的例子,除了移动体以外,还列举有智能手机、平板终端、智能手表、智能眼镜、hmd(头戴显示器)等可穿戴设备、具有稳定器等的照相机、摄像机等电子设备等。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。