桥梁钢箱梁u肋检测机器人
技术领域
1.本发明涉及桥梁钢结构检测技术领域,具体涉及桥梁钢箱梁u肋检测机器人。
背景技术:
2.桥梁钢箱梁的抗弯抗扭刚度大、承载能力强、建设周期短等优点,在大跨径公路桥梁或公铁两用桥梁中得到了广泛的应用,钢箱梁服役过程中桥面的铺装会出现开裂、拥堆、脱落等问题,其病害源主要为钢箱梁的u肋角焊缝,u肋角焊缝在复杂的大气环境下,其表面的防腐涂装会受到各种腐蚀而失去保护效果,钢箱梁u肋角焊缝在制造过程中不可避免地存在一定的残余应力,一般在服役数年后由于局部载荷的作用会产生疲劳裂纹,疲劳裂纹会大幅降低钢箱梁钢桥面板的抗弯刚度和抗扭刚度,并直接导致钢桥面板上的混凝土的铺装产生开裂、脱落等病害,也会对钢箱梁使用寿命造成影响。
3.现有技术存在以下不足:现有的u肋角焊缝检测机器人体积较大无法通过复杂的区域,且检测范围不完全,影响检测的准确性,并不适用于现役钢结构桥梁的u肋角焊缝检测。
4.因此,发明桥梁钢箱梁u肋检测机器人很有必要。
技术实现要素:
5.为此,本发明提供桥梁钢箱梁u肋检测机器人,通过u肋两处焊缝检测完毕时,舵机驱动两组纵向的机架分别顺、逆时针旋转90
°
,使机架与调节装置位于同一条直线上,麦克纳姆轮驱动变形后的机器人横向移动至相邻u肋,复位后进行相邻u肋的检测,以解决便于通过复杂地形与提高检测准确性的问题。
6.为了实现上述目的,本发明提供如下技术方案:桥梁钢箱梁u肋检测机器人,包括机架、调节装置与监测装置,所述机架设有两组,两组所述机架与调节装置两端连接,所述监测装置安装在调节装置顶部,还包括:安装于机架底部的移动机构,所述移动机构设有三组,三组所述移动机构之间设有吸附机构,所述吸附机构设有两组;
7.所述调节装置包括支撑架,所述支撑架两侧安装有舵机,两组所述机架内壁顶部固定安装有限位环,所述舵机底部输出端与限位环固定连接;
8.所述机架内壁开设有空腔,所述机架底部设有底板,所述底板内壁开设有凹槽一,所述凹槽一设有两组,所述吸附机构安装在凹槽一内壁。
9.优选的,所述机架两侧均匀安装有螺栓,所述底板两侧固定安装有挡板,所述挡板与底板为一体结构,所述底板插接在空腔内壁通过螺栓固定,所述挡板顶部与机架底部连接。
10.优选的,所述吸附机构包括限位板,所述限位板一端与凹槽一内壁固定连接,所述限位板一侧活动安装有转轴一,所述限位板一侧设有半月板,所述转轴一一端与半月板活动连接,所述半月板底部固定安装有条形板一,所述条形板一与半月板为一体式结构,所述吸附机构包括支撑座二,所述支撑座二固定安装在底板底部。
11.优选的,所述限位板左侧固定安装有减速电机二,所述减速电机二外壁与凹槽一固定连接,所述限位板右侧活动安装有齿轮,所述减速电机二输出轴与齿轮固定连接,所述半月板通过齿轮纹与齿轮啮合连接。
12.优选的,所述条形板一内侧设有条形板二,所述条形板二与条形板一交叉设置,所述条形板二内壁活动安装有转轴二,所述转轴二右端与条形板一活动连接,所述条形板二与条形板一底部设有支撑座一,所述支撑座一与支撑座二内壁开设有滑槽,所述条形板二两端活动安装有活动轴,所述活动轴插接在滑槽内壁,所述条形板二两端与滑槽滑动连接,所述支撑座一顶部固定安装有限位块,所述限位块一侧活动安装有旋转轴,所述旋转轴与条形板一底部活动连接。
13.优选的,所述移动机构包括限位座,所述限位座顶部固定安装在底板底部,所述限位座底部固定安装有支撑环,所述支撑环左侧设有麦克纳姆轮,所述麦克纳姆轮右侧输入端与支撑环活动连接,所述限位座右侧内壁开设有凹槽二,所述凹槽二内壁固定安装有减速电机一,所述减速电机一左侧输出轴与麦克纳姆轮输入端固定连接。
14.优选的,所述舵机与支撑架顶部连接处固定安装有卡板一,所述舵机与支撑架底部连接处固定安装有卡板二,所述舵机一侧固定安装有限位柱,所述限位柱底部与卡板二固定连接。
15.优选的,所述支撑架顶部中心位置固定安装有摆动气缸,所述监测装置包括支撑柱,所述支撑柱底部与摆动气缸输出端固定连接,所述支撑柱顶部固定安装有辅助杆,所述辅助杆一端安装有翻转机构。
16.优选的,所述翻转机构包括减速电机三,所述减速电机三左侧与辅助杆固定连接,所述减速电机三右侧输出轴固定安装有l形板,所述l形板内侧设有cis探伤仪,所述cis探伤仪一侧固定安装有转杆,所述l形板一侧固定安装有支撑板,所述支撑板顶部固定安装有减速电机四,所述减速电机四输出轴与转杆固定连接。
17.优选的,所述空腔内壁设有电池,所述电池固定安装在底板顶部,所述支撑座一底部固定安装有电磁吸盘。
18.本发明的有益效果是:
19.1.通过麦克纳姆轮驱动机器人整体纵向移动至指定位置,cis探伤仪进行检测,机器人重复纵向移动,直至检测完u肋的某侧焊缝,机器人反向运动,重复上述检测过程,直至检测完该u肋的另外一条焊缝,该u肋两处焊缝检测完毕时,舵机驱动两组纵向的机架分别顺、逆时针旋转90
°
,使机架与调节装置位于同一条直线上,麦克纳姆轮驱动变形后的机器人横向移动至相邻u肋,复位后进行相邻u肋的检测,具有便于通过复杂地形与提高检测准确性的效果;
20.2.通过吸附机构的减速电机二驱动齿轮旋转,齿轮驱动半月板旋转,半月板通过条形板一带动支撑座一向下移动,同时条形板二通过活动轴在支撑座一与支撑座二的滑槽内移动,使支撑座一带动电磁吸盘向下移动与u肋接触,电磁吸盘通电后将机器人固定吸附在u肋上,具有固定吸附机器人的效果;
21.3.通过摆动气缸带动辅助杆旋转,使cis探伤仪到达指定位置附近,翻转机构工作,减速电机三驱动l形板旋转,使cis探伤仪圆周偏转角度改变,减速电机四驱动转杆旋转,转杆带动cis探伤仪纵向角度改变,使cis探伤仪翻转,具有对准至指定u肋角焊缝的效
果。
附图说明
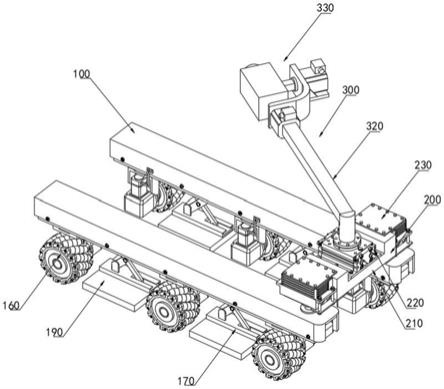
22.图1为本发明的主视结构示意图;
23.图2为本发明的横向变形示意图;
24.图3为本发明的移动机构安装结构示意图;
25.图4为本发明的机架剖视结构示意图;
26.图5为本发明的底板安装结构示意图;
27.图6为本发明的底板俯视结构示意图;
28.图7为本发明的吸附机构安装结构示意图;
29.图8为本发明的吸附机构结构示意图;
30.图9为本发明的调节装置安装结构示意图;
31.图10为本发明的移动机构结构示意图;
32.图11为本发明的监测装置结构示意图。
33.图中:机架100、空腔110、限位环120、螺栓130、底板140、挡板141、凹槽一142、电池150、移动机构160、限位座161、支撑环162、凹槽二163、麦克纳姆轮164、减速电机一165、吸附机构170、限位板171、减速电机二172、齿轮173、半月板174、齿轮纹175、条形板一176、转轴一177、转轴二178、条形板二180、活动轴181、支撑座一182、滑槽183、支撑座二184、限位块185、旋转轴186、电磁吸盘190、调节装置200、支撑架210、摆动气缸220、舵机230、卡板一240、卡板二250、限位柱260、监测装置300、支撑柱310、辅助杆320、翻转机构330、减速电机三340、l形板350、减速电机四360、支撑板370、转杆380、cis探伤仪390。
具体实施方式
34.以下结合附图对本发明的优选实施例进行说明,应当理解,此处所描述的优选实施例仅用于说明和解释本发明,并不用于限定本发明。
35.参照附图1
‑
11,本发明提供的桥梁钢箱梁u肋检测机器人,包括机架100、调节装置200与监测装置300,所述机架100设有两组,两组所述机架100与调节装置200两端连接,所述监测装置300安装在调节装置200顶部,还包括:安装于机架100底部的移动机构160,具体的,所述移动机构160设有三组,三组所述移动机构160之间设有吸附机构170,所述吸附机构170设有两组,调节装置200对机架100具有传动作用,使机架100旋转90
°
,调节装置200对监测装置300具有支撑与调节角度的作用,移动机构160具有实现机器人的全方位移动的作用,吸附机构170具有实现机器人吸附在桥梁钢箱梁u肋处的作用;
36.所述调节装置200包括支撑架210,所述支撑架210两侧安装有舵机230,两组所述机架100内壁顶部固定安装有限位环120,所述舵机230底部输出端与限位环120固定连接,支撑架210对舵机230具有支撑与固定作用,舵机230舵机是角度伺服的驱动器,用于转动的执行部件,适用于那些需要角度不断变化并可以保持的控制系统,舵机230通过限位环120使机架100以限位环120为中心旋转;
37.所述机架100内壁开设有空腔110,所述机架100底部设有底板140,所述底板140内壁开设有凹槽一142,所述凹槽一142设有两组,所述吸附机构170安装在凹槽一142内壁,空
腔110对底板140具有限位与安装作用,凹槽一142对吸附机构170具有限位与安装作用;
38.进一步地,所述机架100两侧均匀安装有螺栓130,所述底板140两侧固定安装有挡板141,所述挡板141与底板140为一体结构,所述底板140插接在空腔110内壁通过螺栓130固定,所述挡板141顶部与机架100底部连接,具体的,螺栓130对机架100与底板140具有连接与固定作用,挡板141对底板140具有限位作用,便于底板140的安装与拆卸,留出空腔110的容量便于安装其他设备;
39.进一步地,所述吸附机构170包括限位板171,所述限位板171一端与凹槽一142内壁固定连接,所述限位板171一侧活动安装有转轴一177,所述限位板171一侧设有半月板174,所述转轴一177一端与半月板174活动连接,所述半月板174底部固定安装有条形板一176,所述条形板一176与半月板174为一体式结构,所述吸附机构170包括支撑座二184,所述支撑座二184固定安装在底板140底部,具体的,凹槽一142对限位板171具有支撑与固定作用,限位板171对转轴一177具有支撑作用,转轴一177对半月板174具有支撑作用,底板140对支撑座二184具有支撑与固定作用;
40.进一步地,所述限位板171左侧固定安装有减速电机二172,所述减速电机二172外壁与凹槽一142固定连接,所述限位板171右侧活动安装有齿轮173,所述减速电机二172输出轴与齿轮173固定连接,所述半月板174通过齿轮纹175与齿轮173啮合连接,具体的,限位板171对减速电机二172具有固定支撑作用,减速电机二172对齿轮173具有传动作用,齿轮173对半月板174具有传动作用;
41.进一步地,所述条形板一176内侧设有条形板二180,所述条形板二180与条形板一176交叉设置,所述条形板二180内壁活动安装有转轴二178,所述转轴二178右端与条形板一176活动连接,所述条形板二180与条形板一176底部设有支撑座一182,所述支撑座一182与支撑座二184内壁开设有滑槽183,所述条形板二180两端活动安装有活动轴181,所述活动轴181插接在滑槽183内壁,所述条形板二180两端与滑槽183滑动连接,所述支撑座一182顶部固定安装有限位块185,所述限位块185一侧活动安装有旋转轴186,所述旋转轴186与条形板一176底部活动连接,具体的,转轴二178对条形板二180与条形板一176具有连接作用,条形板二180与条形板一176可在转轴二178交叉旋转,条形板二180与条形板一176对支撑座一182具有支撑作用,滑槽183对条形板二180具有限位作用,活动轴181具有便于条形板二180在滑槽183内移动的作用,限位块185对旋转轴186具有支撑作用,旋转轴186对条形板一176与限位块185具有连接作用;
42.进一步地,所述移动机构160包括限位座161,所述限位座161顶部固定安装在底板140底部,所述限位座161底部固定安装有支撑环162,所述支撑环162左侧设有麦克纳姆轮164,所述麦克纳姆轮164右侧输入端与支撑环162活动连接,所述限位座161右侧内壁开设有凹槽二163,所述凹槽二163内壁固定安装有减速电机一165,所述减速电机一165左侧输出轴与麦克纳姆轮164输入端固定连接,具体的,底板140对限位座161安装与固定作用,支撑环162对麦克纳姆轮164具有安装作用,麦克纳姆轮164具有依靠各自机轮的方向和速度,这些力的最终合成在任何要求的方向上产生一个合力矢量从而保证了这个平台在最终的合力矢量的方向上能自由地移动,而不改变机轮自身的方向。在它的轮缘上斜向分布着许多小滚子,故轮子可以横向滑移,小滚子的母线很特殊,当轮子绕着固定的轮心轴转动时,各个小滚子的包络线为圆柱面,所以该轮能够连续地向前滚动,通过组合,可以更灵活方便
的实现全方位移动,减速电机一165对麦克纳姆轮164具有传动作用;
43.进一步地,所述舵机230与支撑架210顶部连接处固定安装有卡板一240,所述舵机230与支撑架210底部连接处固定安装有卡板二250,所述舵机230一侧固定安装有限位柱260,所述限位柱260底部与卡板二250固定连接,具体的,卡板一240对舵机230与支撑架210具有固定与连接作用,限位柱260对卡板二250与舵机230具有连接作用,卡板二250对舵机230与支撑架210具有固定与连接作用;
44.进一步地,所述支撑架210顶部中心位置固定安装有摆动气缸220,所述监测装置300包括支撑柱310,所述支撑柱310底部与摆动气缸220输出端固定连接,所述支撑柱310顶部固定安装有辅助杆320,所述辅助杆320一端安装有翻转机构330,具体的,支撑架210对摆动气缸220具有固定与支撑作用,摆动气缸220是利用压缩空气驱动输出轴在一定角度范围内作往复回转运动的气动执行元件,用于阀门的开闭以及机器人的手臂动作等,摆动气缸的,摆动角度,摆动起点,开关形式,开关数及选择项,摆动气缸220具有带动监测装置300旋转调节角度的作用,摆动气缸220对支撑柱310具有支撑与传动作用,支撑柱310对辅助杆320具有支撑与固定作用,辅助杆320对翻转机构330具有具有支撑与固定作用;
45.进一步地,所述翻转机构330包括减速电机三340,所述减速电机三340左侧与辅助杆320固定连接,所述减速电机三340右侧输出轴固定安装有l形板350,所述l形板350内侧设有cis探伤仪390,所述cis探伤仪390一侧固定安装有转杆380,所述l形板350一侧固定安装有支撑板370,所述支撑板370顶部固定安装有减速电机四360,所述减速电机四360输出轴与转杆380固定连接,具体的,辅助杆320对减速电机三340具有固定于支撑作用,减速电机一165、减速电机二172、减速电机三340与减速电机四360是减速机和伺服电机的集成体,减速电机三340的输出轴对l形板350具有传动与支撑作用,l形板350对支撑板370具有支撑与固定作用,支撑板370对减速电机四360具有支撑与固定作用,减速电机四360对转杆380具有传动作用,转杆380对cis探伤仪390具有传动与支撑作用,cis探伤仪390设置为红外探伤仪与红外探测器组合,在红外探测器的协助下,能够穿透200mm深度的焊缝,焊缝里面有微粒、夹杂、隐裂,则这些杂质将吸收红外光,因此在成像系统中将呈现出来;
46.进一步地,所述空腔110内壁设有电池150,所述电池150固定安装在底板140顶部,所述支撑座一182底部固定安装有电磁吸盘190,具体的,底板140对电池150具有安装作用,电池150对本设备具有供电作用,支撑座一182对电磁吸盘190具有支撑与安装作用。
47.本发明的使用过程如下:在使用本发明时本领域工作人员需要启动减速电机一165,驱动麦克纳姆轮164带动机器人整体纵向移动至指定位置,停止移动,摆动气缸220带动辅助杆320旋转,使cis探伤仪390到达指定位置附近,翻转机构330工作,减速电机三340驱动l形板350旋转,使cis探伤仪390圆周偏转角度改变,减速电机四360驱动转杆380旋转,转杆380带动cis探伤仪390纵向角度改变,使cis探伤仪390翻转对准至指定u肋角焊缝,机器人重复纵向移动,直至检测完u肋的某侧焊缝,机器人反向运动,重复上述检测过程,直至检测完该u肋的另外一条焊缝,该u肋两处焊缝检测完毕时,舵机230通过限位环120驱动两组纵向的机架100分别顺、逆时针旋转90
°
,使两组机架100与调节装置200的支撑架210位于同一条直线上,同时吸附机构170的减速电机二172驱动齿轮173旋转,齿轮173驱动半月板174旋转,半月板174通过条形板一176带动支撑座一182向下移动,同时条形板二180通过活动轴181在支撑座一182与支撑座二184的滑槽183内移动,使支撑座一182带动电磁吸盘190
向下移动与u肋接触,电磁吸盘190通电后将机器人固定吸附在第二u肋上,麦克纳姆轮164驱动变形后的机器人横向移动至相邻u肋,复位,进行相邻u肋的检测,u肋坡度较大时,电磁吸盘190通电后控制磁性,使机器人吸附的同时进行移动工作,便于在u肋上进行作业。
48.虽然,上文中已经用一般性说明及具体实施例对本发明作了详尽的描述,但在本发明基础上,可以对之作一些修改或改进,这对本领域技术人员而言是显而易见的。因此,在不偏离本发明精神的基础上所做的这些修改或改进,均属于本发明要求保护的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。