1.本发明涉及机器视觉技术领域,具体为一种基于机器视觉的冰冻家禽自动铣削切片系统。
背景技术:
2.机器视觉系统是通过机器视觉产品,将被摄取目标转换成图像信号,传送给专用的图像处理系统,得到被摄目标的形态信息,根据像素分布和亮度、颜色等信息,转变成数字化信号;图像系统对这些信号进行各种运算来抽取目标的特征,进而将统一标准的家禽切片图像信息导入三维重构系统,获取外观三维面模型与剖面图,并利用三维测量工具自动验证建模精度。
3.在对家禽的内脏进行掏膛时,通常利用机械手从家禽膛口处伸入家禽体内取出内脏,而家禽胴体外形可见而体内内脏位置不可见,为保证掏膛时不损伤家禽体内可食用内脏器官,需要明确家禽胴体外形与内脏的对应关系,从而有利于家禽掏膛时规避易破损内脏,因此我们提出了一种基于机器视觉的冰冻家禽自动铣削切片系统。
技术实现要素:
4.(一)解决的技术问题
5.针对现有技术的不足,本发明公开了一种基于机器视觉的冰冻家禽自动铣削切片系统,以解决上述背景技术中提出的问题。
6.(二)技术方案
7.为实现以上目的,本发明通过以下技术方案予以实现:一种基于机器视觉的冰冻家禽自动铣削切片系统,包括:
8.第一工作台和第二工作台,所述第一工作台的上表面固定连接有显示屏,所述第一工作台的下方安装有电脑主机,所述第一工作台和第二工作台之间固定连接有连接板,所述连接板的上表面固定连接有是收集框,所述第二工作台的上表面固定连接有清洗框和烘干箱;
9.切削箱,所述切削箱固定连接在第二工作台的上表面,所述第二工作台桌面的下表面固定连接有第一气缸,所述第一气缸的伸出轴穿过第二工作台的桌面向着切削箱的内部延伸,并固定连接有移动板,所述移动板滑动连接在切削箱的内壁上,所述切削箱的外壁上固定连接有第二气缸,所述第二气缸的伸出轴穿过切削箱的外壁固定连接有推动板,所述推动板滑动连接在切削箱的内壁上,且固定连接有切削刃,所述切削箱另一侧的外壁上开设有出口;
10.视觉采集机构,所述视觉采集机构装配在第二工作台的上表面。
11.优选的,所述视觉采集机构包括底座,所述底座固定连接在第二工作台的上表面,所述底座的前后侧均固定连接有多个固定块,且通过多个固定块转动连接有多个转动辊,且多个转动辊之间传动连接有传送带。
12.优选的,多个所述转动辊的背面均固定连接有转动轴,且多个转动轴分别穿过对应的固定块并固定套接有传动皮带轮,且多个传动皮带轮之间传动连接有传动皮带。
13.优选的,所述第二工作台的上表面固定连接有驱动电机,所述驱动电机为可调电机,所述驱动电机的输出端固定连接有驱动轴,其中一个所述转动轴的外表面和驱动轴的外表面分别固定套接有第一驱动皮带轮和第二驱动皮带轮,且所述第一驱动皮带轮与第二驱动皮带轮之间传动连接有驱动皮带,且所述第二工作台的上表面设置有摄像组件。
14.优选的,所述摄像组件包括固定框,所述固定框固定连接在第二工作台的上表面,所述固定框的正面通过销轴转动连接有保护门,且所述保护门的正面固定连接有手柄。
15.优选的,所述固定框的内壁上固定连接有两个支撑条,且两个所述支撑条之间固定连接有支撑杆,所述支撑杆外表面活动套接有活动座,所述活动座的外表面固定连接有套环,且所述套环的内壁上固定套接有摄像头,摄像头处于传送带的正上方。
16.优选的,所述活动座的内壁上开设有弧形槽,所述弧形槽的内壁上滑动连接有弧形夹块,所述弧形夹块的与支撑杆的外表面紧密贴合。
17.优选的,所述弧形夹块远离支撑杆的一端转动连接有螺纹杆,所述螺纹杆穿过活动座的外壁向外延伸,且所述螺纹杆与活动座螺纹连接。
18.优选的,所述螺纹杆处于外界的一端固定连接有旋钮。
19.本发明公开了一种基于机器视觉的冰冻家禽自动铣削切片系统,其具备的有益效果如下:
20.1、该基于机器视觉的冰冻家禽自动铣削切片系统,采用圆盘式刀具自动间歇式切削冷冻家禽断面,切片厚度为0.5mm,家禽切片自动通过传送带传动,多个转动辊同时进行转动,从而使得传送带在多个转动辊外表面环绕进行移动,使得放置在传送带的冷冻家禽的切片水平进行移动,然后进入到收集框中进行收集,在冷冻家禽的切片水平进行移动时,通过设置的视觉采集机构,摄像头对切片进行摄像并进行采集,从而可以自动获取高精度的切片图像,并能从二维切片图像重构出反映家禽胴体外形与内脏细观结构的三维模型,同时建立两者外形尺寸的对应关系。
21.2、该基于机器视觉的冰冻家禽自动铣削切片系统,通过设置的切削箱,在第二气缸的作用下,第二气缸的伸出轴伸出,推动了推动板和切削刃在切削箱的内壁上滑动,直至切削刃与冰冻家禽接触并进行切削,同时被切削下的切片被推动板向前推动,使得切片弯曲,直至切片被完全切下并通过出口掉落,此时第二气缸的伸出轴收回,然后第一气缸的伸出轴再次向上移动,带动了冷冻家禽同样向上移动同样的距离,此时第二气缸的伸出轴再次伸出,从而再次进行切削,进而可以将冰冻家禽切削成多个切片。
22.3、该基于机器视觉的冰冻家禽自动铣削切片系统,当切片的大小不同,需要对摄像头的高度进行调节,从而达到调整取样大小的效果时,转动旋钮,带动了螺纹杆进行转动,因螺纹杆与活动座螺纹连接,从而带动了螺纹杆在活动座中旋动,带动了弧形夹块在弧形槽的内壁上滑动,使得弧形夹块与支撑杆相脱离,此时即可拉动活动座在支撑杆的外表面进行上下滑动。
附图说明
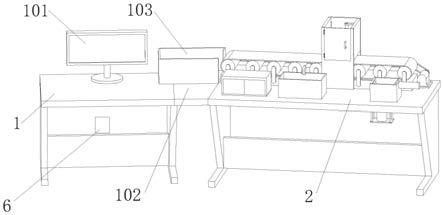
23.图1为本发明结构示意图;
24.图2为本发明部分结构示意图;
25.图3为本发明切削箱的结构示意图;
26.图4为本发明视觉采集机构的结构示意图;
27.图5为本发明传送带的结构示意图;
28.图6为本发明图5中的a部分放大示意图;
29.图7为本发明固定框的结构示意图;
30.图8为本发明固定框的内部结构示意图;
31.图9为本发明摄像头的结构示意图;
32.图10为本发明活动座内部的结构示意图;
33.图11为系统工作原理图;
34.图12为二维切片图像处理流程图;
35.图13为二维切片图像重构为三维模型的方案流程图。
36.图中:1、第一工作台;101、显示屏;102、连接板;103、收集框;2、第二工作台;201、清洗框;202、烘干箱;3、切削箱;301、第一气缸;302、移动板;303、第二气缸;304、推动板;305、切削刃;306、出口;4、底座;401、转动辊;402、传送带;403、转动轴;404、传动皮带轮;405、传动皮带;406、驱动电机;407、驱动轴;408、第一驱动皮带轮;409、第二驱动皮带轮;410、驱动皮带;5、固定框;501、保护门;502、支撑条;503、支撑杆;504、活动座;505、套环;506、摄像头;507、弧形槽;508、弧形夹块;509、螺纹杆;6、电脑主机
具体实施方式
37.实施例一:
38.本发明实施例公开一种基于机器视觉的冰冻家禽自动铣削切片系统,
39.请参照附图1
‑
3,包括:
40.第一工作台1和第二工作台2,第一工作台1的上表面固定连接有显示屏101,第一工作台1下方安装有电脑主机6,第一工作台1和第二工作台2之间固定连接有连接板102,连接板102的上表面固定连接有是收集框103,第二工作台2的上表面固定连接有清洗框201和烘干箱202;
41.电脑主机6与显示屏101、第一气缸301、第二气缸303电性连接,且显示屏101采用触摸屏,通过在显示屏101上对电脑主机6进行操作。
42.切削箱3,切削箱3固定连接在第二工作台2的上表面,第二工作台2桌面的下表面固定连接有第一气缸301,第一气缸301的伸出轴穿过第二工作台2的桌面向着切削箱3的内部延伸,并固定连接有移动板302,移动板302滑动连接在切削箱3的内壁上,切削箱3的外壁上固定连接有第二气缸303,第二气缸303的伸出轴穿过切削箱3的外壁固定连接有推动板304,推动板304滑动连接在切削箱3的内壁上,且固定连接有切削刃305,切削箱3另一侧的外壁上开设有出口306;
43.视觉采集机构,视觉采集机构装配在第二工作台2的上表面。
44.工作原理:在使用的过程中,首先将冰冻的家禽放入到清洗框201中进行清洗,清洗结束后将其放入到烘干箱202中进行烘干,使其外表面不会存在水分,且不会解冻;
45.然后将冰冻家禽放入到切削箱3中,并处于移动板302上,接着由电脑主机6控制第
一气缸301工作,在第一气缸301的作用下,第一气缸301的伸出轴伸出,推动了移动板302向上移动,直至使得冰冻家禽高出切削刃305一定的高度,此高度可以根据实际需求设置,如1mm等;
46.然后电脑主机6控制第二气缸303工作,在第二气缸303的作用下,第二气缸303的伸出轴伸出,推动了推动板304和切削刃305在切削箱3的内壁上滑动,直至切削刃305与冰冻家禽接触并进行切削,同时被切削下的切片被推动板304向前推动,使得切片弯曲,直至切片被完全切下并通过出口306掉落,此时电脑主机6控制第二气缸303的伸出轴收回,然后电脑主机6控制第一气缸301的伸出轴再次向上移动,带动了冷冻家禽同样向上移动同样的距离,此时电脑主机6控制第二气缸303的伸出轴再次伸出,从而再次进行切削,进而可以将冰冻家禽切削成多个切片。
47.实施例二:
48.本发明实施例公开一种基于机器视觉的冰冻家禽自动铣削切片系统,
49.请参照附图1
‑
3,包括:
50.第一工作台1和第二工作台2,第一工作台1的上表面固定连接有显示屏101,第一工作台1和第二工作台2之间固定连接有连接板102,连接板102的上表面固定连接有是收集框103,第二工作台2的上表面固定连接有清洗框201和烘干箱202;
51.电脑主机6与显示屏101、驱动电机406电性连接,且显示屏101采用触摸屏,通过在显示屏101上对电脑主机6进行操作。
52.切削箱3,切削箱3固定连接在第二工作台2的上表面,第二工作台2桌面的下表面固定连接有第一气缸301,第一气缸301的伸出轴穿过第二工作台2的桌面向着切削箱3的内部延伸,并固定连接有移动板302,移动板302滑动连接在切削箱3的内壁上,切削箱3的外壁上固定连接有第二气缸303,第二气缸303的伸出轴穿过切削箱3的外壁固定连接有推动板304,推动板304滑动连接在切削箱3的内壁上,且固定连接有切削刃305,切削箱3另一侧的外壁上开设有出口306;
53.视觉采集机构,视觉采集机构装配在第二工作台2的上表面,通过设置的视觉采集机构,将冷冻家禽的切片分个放置在传送带402上,多个转动辊401同时进行转动,从而使得传送带402在多个转动辊401外表面环绕进行移动,使得放置在传送带402的冷冻家禽的切片水平进行移动,然后进入到收集框103中进行收集,在冷冻家禽的切片水平进行移动时,摄像头506对切片进行摄像并进行采集,从而可以自动获取高精度的切片图像,将采集到的切片图像传输至电脑主机6,电脑主机6控制显示屏101相应的图片,在电脑主机6中设置好图像识别程序和三维建模程序,将二维切片图像重构为三维模型,并显示在显示屏101中,通过三维模型来反映内脏细观结构。
54.电脑主机6中设置的二维切片图像识别流程为:先对摄像头506采集到的切片图像进行灰度化处理,将彩色图转换为黑白图,降低计算量,采用中值滤波法对灰度化后的图像进行滤波去噪处理,得到更为清晰的图像,采用区域生长算法对图像进行分割,将家禽内脏与背景分开,得到包含家禽内脏在内的二值化图像,再通过图像的膨胀与腐蚀算法对二值化后的图像进行处理,将二值化处理中存在的图像空洞进行填充,接着采用边缘提取算法将家禽内脏切片图的轮廓线条提取出来,每切片一次,摄像头506便采集一张图片进行识别,在设置好的图像识别程序中记录每一次切片图,待一只家禽切片结束后进行三维建模。
55.二维切片图像重构为三维模型的方案为:采用体绘制的光线投射算法将二维切片图像重构为三维模型,采用以点代替三角面片将边缘提取后的图像绘制到三维空间,如图12所示,先将所有切片图像序列按顺序排列,再将这些图像按顺序建立三维数据场,由于图像序列之间有一定的间隔,因此需要在两层图像之间进行插值,使用三次b样条进行插值。之后设定光线吸收模型和像素点的透明度,然后发出光线进行采样,最后合成图像。
56.请参照附图4,视觉采集机构包括底座4,底座4固定连接在第二工作台2的上表面,底座4的前后侧均固定连接有多个固定块,且通过多个固定块转动连接有多个转动辊401,且多个转动辊401之间传动连接有传送带402。
57.请参照附图5
‑
6,多个转动辊401的背面均固定连接有转动轴403,且多个转动轴403分别穿过对应的固定块并固定套接有传动皮带轮404,且多个传动皮带轮404之间传动连接有传动皮带405。
58.第二工作台2的上表面固定连接有驱动电机406,驱动电机406的输出端固定连接有驱动轴407,其中一个转动轴403的外表面和驱动轴407的外表面分别固定套接有第一驱动皮带轮408和第二驱动皮带轮409,且第一驱动皮带轮408与第二驱动皮带轮409之间传动连接有驱动皮带410,且第二工作台2的上表面设置有摄像组件。
59.工作原理:在使用的过程中,首先将冷冻家禽的切片分个放置在传送带402上,由电脑主机6控制驱动电机406的转动,在驱动电机406工作时,输出端带动了驱动轴407进行转动,同时通过第二驱动皮带轮409和驱动皮带410带动了第一驱动皮带轮408同时进行转动,在第一驱动皮带轮408进行转动时,带动了其中一个转动轴403进行转动,此时通过多个传动皮带轮404,且多个传动皮带轮404之间传动连接有传动皮带405,从而使得多个转动轴403同时进行转动;
60.在多个转动轴403转动时,带动了多个转动辊401同时进行转动,从而使得传送带402在多个转动辊401外表面环绕进行移动,使得放置在传送带402的冷冻家禽的切片水平进行移动,然后进入到收集框103中进行收集。
61.实施例三:
62.本发明实施例公开一种基于机器视觉的冰冻家禽自动铣削切片系统,
63.请参照附图1
‑
3,包括:
64.第一工作台1和第二工作台2,第一工作台1的上表面固定连接有显示屏101,第一工作台1和第二工作台2之间固定连接有连接板102,连接板102的上表面固定连接有是收集框103,第二工作台2的上表面固定连接有清洗框201和烘干箱202;
65.电脑主机6与显示屏101、第一气缸301、第二气缸303、驱动电机406电性连接,且显示屏101采用触摸屏,通过在显示屏101上对电脑主机6进行操作。
66.切削箱3,切削箱3固定连接在第二工作台2的上表面,第二工作台2桌面的下表面固定连接有第一气缸301,第一气缸301的伸出轴穿过第二工作台2的桌面向着切削箱3的内部延伸,并固定连接有移动板302,移动板302滑动连接在切削箱3的内壁上,切削箱3的外壁上固定连接有第二气缸303,第二气缸303的伸出轴穿过切削箱3的外壁固定连接有推动板304,推动板304滑动连接在切削箱3的内壁上,且固定连接有切削刃305,切削箱3另一侧的外壁上开设有出口306;
67.视觉采集机构,视觉采集机构装配在第二工作台2的上表面。
68.摄像组件包括固定框5,固定框5固定连接在第二工作台2的上表面,固定框5的正面通过销轴转动连接有保护门501,且保护门501的正面固定连接有手柄。
69.固定框5的内壁上固定连接有两个支撑条502,且两个支撑条502之间固定连接有支撑杆503,支撑杆503外表面活动套接有活动座504,活动座504的外表面固定连接有套环505,且套环505的内壁上固定套接有摄像头506,摄像头506处于传送带402的正上方。
70.活动座504的内壁上开设有弧形槽507,弧形槽507的内壁上滑动连接有弧形夹块508,弧形夹块508的与支撑杆503的外表面紧密贴合。
71.弧形夹块508远离支撑杆503的一端转动连接有螺纹杆509,螺纹杆509穿过活动座504的外壁向外延伸,且螺纹杆509与活动座504螺纹连接。
72.螺纹杆509处于外界的一端固定连接有旋钮,通过设置的旋钮,从而便于对螺纹杆509进行转动。
73.工作原理:在使用的过程中,通过设置的摄像头506,在冷冻家禽的切片水平进行移动时,摄像头506对切片进行摄像并进行采集,并将采集到的图像传输至电脑主机6进行图像识别和三维建模;
74.当切片的大小不同,需要对摄像头506的高度进行调节,从而达到调整取样大小的效果时,转动旋钮,带动了螺纹杆509进行转动,因螺纹杆509与活动座504螺纹连接,从而带动了螺纹杆509在活动座504中旋动,带动了弧形夹块508在弧形槽507的内壁上滑动,使得弧形夹块508与支撑杆503相脱离,此时即可拉动活动座504在支撑杆503的外表面进行上下滑动;
75.在活动座504进行上下滑动时,带动了套环505和摄像头506上下进行移动,直至移动到合适位置,可以使得摄像头506处于最佳采样高度即可,此时即可反向转动旋钮,带动了弧形夹块508在弧形槽507的内壁上滑动,使得弧形夹块508与支撑杆503紧密贴合,从而对弧形夹块508与支撑杆503的位置进行固定,进而对摄像头506的位置固定即可。
76.综上所述:在使用的过程中,首先将冰冻的家禽放入到清洗框201中进行清洗,清洗结束后将其放入到烘干箱202中进行烘干,使其外表面不会存在水分,且不会解冻;
77.然后将冰冻家禽放入到切削箱3中,并处于移动板302上,此时电脑主机6控制第一气缸301工作,在第一气缸301的作用下,第一气缸301的伸出轴伸出,推动了移动板302向上移动,直至使得冰冻家禽高出切削刃305一定的高度,此高度可以根据实际需求设置,如1mm等;
78.然后电脑主机6控制第二气缸303工作,在第二气缸303的作用下,第二气缸303的伸出轴伸出,推动了推动板304和切削刃305在切削箱3的内壁上滑动,直至切削刃305与冰冻家禽接触并进行切削,同时被切削下的切片被推动板304向前推动,使得切片弯曲,直至切片被完全切下并通过出口306掉落,此时第二气缸303的伸出轴收回,然后第一气缸301的伸出轴再次向上移动,带动了冷冻家禽同样向上移动同样的距离,此时第二气缸303的伸出轴再次伸出,从而再次进行切削,进而可以将冰冻家禽切削成多个切片;
79.将冷冻家禽的切片分个放置在传送带402上,由电脑主机6控制驱动电机406工作,驱动电机406的输出端带动了驱动轴407进行转动,同时通过第二驱动皮带轮409和驱动皮带410带动了第一驱动皮带轮408同时进行转动,在第一驱动皮带轮408进行转动时,带动了其中一个转动轴403进行转动,此时通过多个传动皮带轮404,且多个传动皮带轮404之间传
动连接有传动皮带405,从而使得多个转动轴403同时进行转动;
80.在多个转动轴403转动时,带动了多个转动辊401同时进行转动,从而使得传送带402在多个转动辊401外表面环绕进行移动,使得放置在传送带402的冷冻家禽的切片水平进行移动,然后进入到收集框103中进行收集;
81.在冷冻家禽的切片水平进行移动时,摄像头506对切片进行摄像并进行采集,从而可以自动获取高精度的切片图像,将采集到的切片图像传输至电脑主机6,电脑主机6控制显示屏101相应的图片,在电脑主机6中设置好图像识别程序和三维建模程序,将二维切片图像重构为三维模型,并显示在显示屏101中,通过三维模型来反映内脏细观结构。
82.当切片的大小不同,需要对摄像头506的高度进行调节,从而达到调整取样大小的效果时,转动旋钮,带动了螺纹杆509进行转动,因螺纹杆509与活动座504螺纹连接,从而带动了螺纹杆509在活动座504中旋动,带动了弧形夹块508在弧形槽507的内壁上滑动,使得弧形夹块508与支撑杆503相脱离,此时即可拉动活动座504在支撑杆503的外表面进行上下滑动;
83.在活动座504进行上下滑动时,带动了套环505和摄像头506上下进行移动,直至移动到合适位置,可以使得摄像头506处于最佳采样高度即可,此时即可反向转动旋钮,带动了弧形夹块508在弧形槽507的内壁上滑动,使得弧形夹块508与支撑杆503紧密贴合,从而对弧形夹块508与支撑杆503的位置进行固定,进而对摄像头506的位置固定即可。
84.以上显示和描述了本发明的基本原理和主要特征和本发明的优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是说明本发明的原理,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内。本发明要求保护范围由所附的权利要求书及其等效物界定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。