1.本发明涉及垃圾分类技术领域,特别是涉及一种垃圾分类装置及方法。
背景技术:
2.随着办公自动化水平的逐年提高,办公垃圾逐渐成为垃圾处理当中不可忽视的一部分,而当前中国大部分的办公场合主要还是依靠员工自行进行垃圾分类,不仅效率较低,还容易出现错投误投的现象,办公垃圾资源化率较低。
技术实现要素:
3.为了克服现有技术的不足,本发明的目的是提供一种垃圾分类装置及方法,以提高办公垃圾分类的效率。
4.为实现上述目的,本发明提供了如下方案:
5.一种垃圾分类装置,包括:外壳、摄像头、控制模块、旋转装置和多个垃圾桶;
6.所述外壳上设置垃圾投放口;多个所述垃圾桶分布于所述外壳形成的空腔内;一个所述垃圾桶对应一种垃圾分类信息;所述摄像头用于采集待分类垃圾的图像信息;所述旋转装置与所述外壳连接;所述控制模块分别与所述摄像头和所述旋转装置电连接,所述控制模块用于根据所述图像信息得到所述待分类垃圾的垃圾分类信息,并根据所述待分类垃圾的垃圾分类信息控制所述旋转装置转动,以带动所述外壳转动,使得所述垃圾投放口与对应的所述垃圾桶连通。
7.优选地,所述外壳包括垃圾桶桶体和与所述垃圾桶桶体活动连接的桶盖;所述垃圾桶桶体与所述桶盖形成了所述空腔;各个所述垃圾桶均设置于所述垃圾桶桶体中,所述垃圾桶设置有连通开口,所述垃圾投放口设置于所述桶盖上;所述连通开口的尺寸大于所述垃圾投放口的尺寸。
8.优选地,所述旋转装置包括:转轴、旋转平台和舵机;
9.所述转轴的一端与所述桶盖连接,所述转轴的另一端与所述旋转平台的一端连接,所述旋转平台的另一端与所述垃圾桶桶体连接,所述舵机分别与所述旋转平台和所述控制模块连接,所述舵机用于根据所述垃圾分类信息控制所述旋转平台进行旋转,以通过所述转轴的转动带动所述桶盖上的所述垃圾投放口进行旋转。
10.优选地,还包括识别按键;
11.所述识别按键设置在所述桶盖上,所述识别按键与所述控制模块连接,所述识别按键用于对所述控制模块的开关进行控制。
12.优选地,所述外壳上设置有垃圾识别区;所述垃圾识别用于存放所述待分类垃圾。
13.优选地,还包括多个垃圾类别指示灯;一个所述垃圾类别指示灯对应一种垃圾分类信息;所述垃圾类别指示灯设置在所述桶盖上,所述垃圾类别指示灯与所述控制模块连接,所述垃圾类别指示灯用于根据所述垃圾分类信息进行灯光提示。
14.优选地,还包括电源;
15.所述电源与所述控制模块连接。
16.优选地,所述控制模块包括依次连接的数据收集单元、编码单元、数据收发单元、解码单元和图像识别单元;
17.所述数据收集单元与所述摄像头连接,所述数据收集单元用于获取所述摄像头采集到的所述图像信息;所述编码单元用于将所述图像信息进行转换,得到编码信息;所述数据收发单元用于将所述编码信息进行发送;所述解码单元用于接收编码信息并进行解码,得到解码信息;所述图像识别单元内嵌有图像预测模型,所述图像预测模型用于根据所述解码信息进行图像识别,得到所述垃圾分类信息,并将所述垃圾分类信息发送至所述数据收发单元。
18.优选地,所述图像识别单元设置在云端服务器上。
19.一种垃圾分类方法,应用于上述垃圾分类装置,所述方法包括:
20.采集待分类垃圾的图像信息;
21.根据所述图像信息得到垃圾分类信息,并根据所述垃圾分类信息控制旋转装置进行转动,以带动外壳转动,使得垃圾投放口与对应的垃圾桶连通。
22.根据本发明提供的具体实施例,本发明公开了以下技术效果:
23.本发明提供了一种垃圾分类装置及方法,该装置外壳、摄像头、控制模块、旋转装置和多个垃圾桶;所述外壳上设置垃圾投放口;多个所述垃圾桶分布于所述外壳形成的空腔内;一个所述垃圾桶对应一种垃圾分类信息;所述摄像头用于采集待分类垃圾的图像信息;所述旋转装置与所述外壳连接;所述控制模块分别与所述摄像头和所述旋转装置电连接,所述控制模块用于根据所述图像信息得到所述待分类垃圾的垃圾分类信息,并根据所述待分类垃圾的垃圾分类信息控制所述旋转装置转动,以带动所述外壳转动,使得所述垃圾投放口与对应的所述垃圾桶连通。本发明基于图像识别技术,实现对常见办公垃圾类别的视觉识别、自动分类,提高了办公垃圾分类的效率。
附图说明
24.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
25.图1为本发明提供的实施例中的装置整体外观图;
26.图2为本发明提供的实施例中的装置内部结构;
27.图3为本发明提供的实施例中的分类垃圾桶示意图;
28.图4为本发明提供的实施例中的垃圾桶内部排列示意图;
29.图5为本发明提供的实施例中的垃圾类别指示灯示意图;
30.图6为本发明提供的实施例中的转轴及固定螺帽;
31.图7为本发明提供的实施例中的旋转装置示意图;
32.图8为本发明提供的实施例中的硬件原理图;
33.图9为本发明提供的实施例中的装置工作流程图;
34.图10为本发明提供的实施例中的云端预测服务流程图;
35.图11为本发明提供的实施例中的系统工作流程图;
36.图12为本发明提供的实施例中的分类方法流程图。
37.符号说明:
38.11
‑
垃圾桶桶体、12
‑
桶盖、13
‑
固定螺帽、14
‑
可回收物垃圾桶、15
‑
干垃圾桶、16
‑
有害垃圾桶、17
‑
转轴、18
‑
旋转平台、19
‑
垃圾投放口、20
‑
办公垃圾识别区域、21
‑
摄像头、22
‑
识别开关、23
‑
垃圾类别指示灯、24
‑
舵机、25
‑
控制模块、26
‑
电源,31
‑
红灯,32
‑
黄灯,33
‑
绿灯,34
‑
固定平台,35
‑
螺孔,36
‑
螺纹铜柱。
具体实施方式
39.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
40.在本文中提及“实施例”意味着,结合实施例描述的特定特征、结构或特性可以包含在本技术的至少一个实施例中。在说明书中的各个位置出现该短语并不一定均是指相同的实施例,也不是与其它实施例互斥的独立的或备选的实施例。本领域技术人员显式地和隐式地理解的是,本文所描述的实施例可以与其它实施例相结合。
41.本技术的说明书和权利要求书及所述附图中的术语“第一”、“第二”、“第三”和“第四”等是用于区别不同对象,而不是用于描述特定顺序。此外,术语“包括”和“具有”以及它们任何变形,意图在于覆盖不排他的包含。例如包含了一系列步骤、过程、方法等没有限定于已列出的步骤,而是可选地还包括没有列出的步骤,或可选地还包括对于这些过程、方法、产品或设备固有的其它步骤元。
42.本发明的目的是提供一种垃圾分类装置及方法,实现对常见办公垃圾类别的视觉识别、自动分类,提高了办公垃圾分类的效率。
43.为使本发明的上述目的、特征和优点能够更加明显易懂,下面结合附图和具体实施方式对本发明作进一步详细的说明。
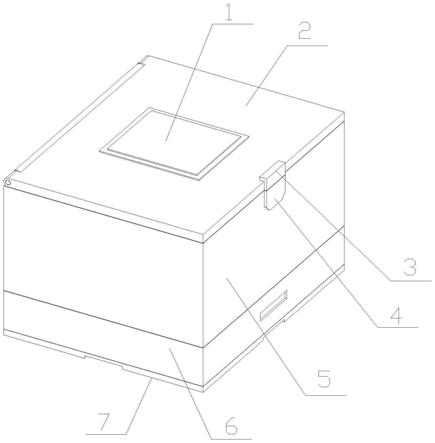
44.请参阅图1至图7,本实施例提供了一种垃圾分类装置,包括:包含有垃圾投放口的外壳、摄像头21、控制模块25、旋转装置和多个垃圾桶。
45.所述多个垃圾桶均分布于所述外壳形成的空腔内;一个所述垃圾桶对应一种垃圾分类信息;所述摄像头21用于采集待分类垃圾的图像信息;所述旋转装置与各个所述垃圾桶连接,所述旋转装置用于旋转所述外壳;所述控制模块25分别与所述摄像头21和所述旋转装置连接,所述控制模块25用于根据所述图像信息得到所述垃圾分类信息,并根据所述垃圾分类信息控制所述旋转装置进行转动,以使一个所述垃圾桶与所述垃圾投放口19连通。
46.可选地,本实施例中的控制模块25采用树莓派3b 作为核心控制器。
47.具体的,所述摄像头21采用usb免驱摄像头。
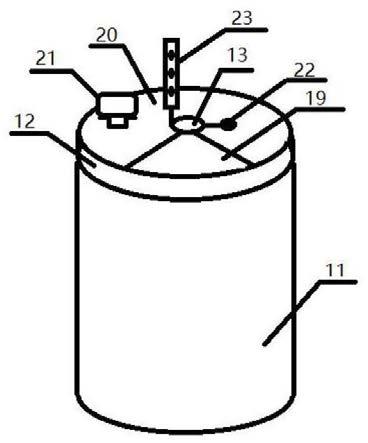
48.优选地,所述外壳包括垃圾桶桶体11和与所述垃圾桶桶体11活动连接的桶盖12;所述垃圾桶桶体11与所述桶盖12形成了所述空腔;各个所述垃圾桶均设置于所述垃圾桶桶体11中,所述垃圾桶设置有连通开口,所述垃圾投放口19设置于所述桶盖12上;所述连通开
口的尺寸大于所述垃圾投放口19的尺寸。
49.可选地,本实施例中的垃圾桶个数为3个,其中包括可回收物垃圾桶14、干垃圾桶15和有害垃圾桶16。
50.优选地,所述旋转装置包括:转轴17、旋转平台18和舵机24;
51.所述转轴17的一端与所述桶盖12连接,所述转轴17的另一端与所述旋转平台18的一端连接,所述旋转平台18的另一端与所述垃圾桶桶体11连接,所述舵机24分别与所述旋转平台18和所述控制模块25连接,所述舵机24用于根据所述垃圾分类信息控制所述旋转平台18进行旋转,以通过所述转轴17的转动带动所述桶盖12上的所述垃圾投放口19进行旋转。
52.可选地,所述舵机24的型号为ks3527型数字舵机。
53.优选地,还包括识别按键22;
54.所述识别按键22设置在所述桶盖12上,所述识别按键22与所述控制模块25连接,所述识别按键22用于对所述控制模块25的开关进行控制。
55.优选地,还包括垃圾识别区;所述垃圾识别区设置在所述桶盖12上,用于存放所述待分类垃圾。
56.优选地,还包括多个垃圾类别指示灯23;一个所述垃圾类别指示灯23对应一种垃圾分类信息;所述垃圾类别指示灯23设置在所述桶盖12上,所述垃圾类别指示灯23与所述控制模块25连接,所述垃圾类别指示灯23用于根据所述垃圾分类信息进行灯光提示。
57.优选地,还包括电源26;所述电源26与所述控制模块25连接。
58.进一步地,本实施例中的装置由垃圾桶桶体11、桶盖12、摄像头21、识别按钮(识别按键22)、垃圾类别指示灯23、固定螺帽13、可回收物垃圾桶14、干垃圾桶15、有害垃圾桶16、转轴17、旋转平台18、分类投放口(垃圾投放口19)、办公垃圾识别区域20、ks3527型数字舵机、树莓派3b 、5v电源26等几部分组成。
59.如图8所示,树莓派3b 是本实施例中的装置的主要控制单元与数据传输装置,usb免驱摄像头用于采集办公垃圾图像,识别按钮用于开启图像采集及办公垃圾识别程序,5v电源26用于对树莓派3b 25供电,ks3527型数字舵机用于驱动旋转平台18通过转轴17带动分类投放口旋转,垃圾类别指示灯23用于显示识别出的垃圾类别。
60.进一步地,usb免驱摄像头、识别按钮、垃圾类别指示灯23、办公垃圾识别区域20均安装在垃圾桶顶盖上,在垃圾桶顶盖圆心处,在垃圾桶顶盖上开90
°
的扇形作为分类投放口,可回收物垃圾桶14、干垃圾桶15、有害垃圾桶16位于垃圾桶桶体11内,放置于垃圾桶桶体11内的固定平台34上。转轴17与旋转平台18通过转轴17上的螺孔35使用螺丝相连接,旋转平台18上的螺纹铜柱36与垃圾桶桶体11通过螺丝相连接,固定螺帽13插入垃圾桶顶盖圆心处的孔洞与转轴17上的螺纹相连接,从而实现ks3527型数字舵机带动分类投放口转动的目的。
61.另外,垃圾类别指示灯23含有三种不同颜色的指示灯,红灯31表示有害垃圾,黄灯32表示干垃圾,绿灯33表示可回收垃圾。
62.优选地,所述控制模块25包括依次连接的数据收集单元、编码单元、数据收发单元、解码单元和图像识别单元。
63.所述数据收集单元与所述摄像头21连接,所述数据收集单元用于获取所述摄像头
21采集到的所述图像信息;所述编码单元用于将所述图像信息进行转换,得到编码信息;所述数据收发单元用于将所述编码信息进行发送;所述解码单元用于接收编码信息并进行解码,得到解码信息;所述图像识别单元内嵌有图像预测模型,所述图像预测模型用于根据所述解码信息进行图像识别,得到所述垃圾分类信息,并将所述垃圾分类信息发送至所述数据收发单元。
64.优选地,所述图像识别单元设置在云端服务器上。
65.如图9所示,使用者将办公垃圾放置于办公垃圾识别区域20,按下识别按钮22,树莓派3b 25收到按钮信号后开启usb免驱摄像头,采集办公垃圾识别区域20的办公垃圾图片,采集完成后树莓派3b 25将采集到的图片信息上传至云端及数据库(方法方案:云端预测服务设计),由云端预测服务进行办公垃圾种类识别并将识别结果返回至树莓派3b 25,树莓派3b 25根据识别结果点亮相应的垃圾类别指示灯23(有害垃圾:红灯31,干垃圾:黄灯32,可回收垃圾:绿灯33)3s,同时控制ks3527型数字舵机旋转相应的角度,使旋转平台18及转轴17带动垃圾桶顶盖12旋转相应的角度,从而使分类投放口19旋转至相应的分类垃圾桶(可回收物垃圾桶14、干垃圾桶15、有害垃圾桶16)上方,由使用者将办公垃圾通过分类投放口19将办公垃圾投入相应的分类垃圾桶(可回收物垃圾桶14、干垃圾桶15、有害垃圾桶16)。
66.如图10所示,本实施例中的云端服务器能够进行云端预测服务,其步骤如下:
67.步骤1:通过拉取tensorflow serving的docker镜像,将已训练好的模型预测文件上传到云服务器,完成对预测模型的云端部署。
68.步骤2:树莓派3b 将采集到的办公垃圾图像通过base64编码器将图片转化为base64格式,通过socket通信方式将图片数据传递至云端代理服务。
69.步骤3:云端代理服务通过base64解码器解析图像数据,将图像数据通过grpc请求的方式,递交给预测模型,预测模型对图片类别进行识别。
70.步骤4:模型预测结果通过socket通信的方式传递给树莓派3b ,完成一次对办公垃圾类别的云端预测服务。
71.另外,本实施例中还提供了一种数据库存储与web端显示方法,其步骤如下:
72.步骤1:树莓派3b 将图片获取时间,地点等信息通过socket通信的方式传递给pc端的mysql数据库代理服务。
73.步骤2:模型预测服务端将办公垃圾图片预测结果(办公垃圾种类)传递给pc端的mysql数据库。
74.步骤3:mysql数据库代理服务将接收到的办公垃圾图片存储到pc上指定位置,并将办公垃圾处理信息存储到mysql数据库中。
75.步骤4:django视图函数执行sql语句,从mysql数据库中查询图片信息,传递给浏览器中的模板文件。
76.步骤5:浏览器渲染模板文件,在网页中呈现出存储在mysql中的信息,并加载图片资源,将办公垃圾投放信息显示在网页中。
77.如图11所示,本实施例还提供一种由本实施例中的装置组成的分类系统的系统工作流程图,其步骤如下:
78.步骤1:系统启动后,树莓派3b 首先与垃圾分类服务端建立socket通讯,同时打开usb摄像头获取识别区域实时图片,服务端包括模型预测与本地保存两部分。
79.步骤2:使用者通过按下外部识别按钮向系统发送拍照指令,系统在收到拍照指令后,使用usb摄像头采集识别区域当前图片,同时通过socket通信将图片上传至模型预测服务端与本地保存服务端。
80.步骤3:模型预测服务端通过加载事先训练好的预测模型,识别所采集垃圾的种类。
81.步骤4:模型预测服务端将识别结果发送至树莓派3b ,同时将识别结果、识别时间及垃圾投放地点上传至垃圾处理数据库。
82.步骤5:树莓派3b 根据识别结果控制垃圾投放口旋转至相应位置,同时点亮相应的分类指示灯。
83.步骤6:web端从数据库中获取办公垃圾图片及识别结果、识别时间、垃圾投放地点等处理数据,并显示在web端。
84.如图12所示,本实施例还提供了一种垃圾分类方法,应用于上述垃圾分类装置,所述方法包括:
85.步骤100:采集待分类垃圾的图像信息;
86.步骤200:根据所述图像信息得到垃圾分类信息,并根据所述垃圾分类信息控制所述旋转装置进行转动,以带动外壳转动,使得垃圾投放口与对应的垃圾桶连通。
87.本发明的有益效果如下:
88.(1)本发明使用图像识别技术实现对于常见办公垃圾的智能识别与分类功能,并通过云服务技术实现对办公垃圾处理数据的统计与分析,提高了分类的精度。
89.(2)本发明通过云端预测服务设计,将图像预测服务放至云端,大幅提高了对办公垃圾种类的预测速度与精度,确保了办公垃圾分类投放的准确度。
90.(3)本发明通过对办公垃圾分类情况的web端显示,实现了对办公垃圾分类情况的数据分析与投放行为的监控,有助于增强人们的垃圾分类意识,改善办公环境。
91.本说明书中各个实施例采用递进的方式描述,每个实施例重点说明的都是与其他实施例的不同之处,各个实施例之间相同相似部分互相参见即可。对于实施例公开的方法而言,由于其与实施例公开的装置相对应,所以描述的比较简单,相关之处参见装置部分说明即可。
92.本文中应用了具体个例对本发明的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本发明的方法及其核心思想;同时,对于本领域的一般技术人员,依据本发明的思想,在具体实施方式及应用范围上均会有改变之处。综上所述,本说明书内容不应理解为对本发明的限制。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。