1.本发明主要涉及柔性机械手技术领域,特指一种准圆形物体的柔性多自由度抓取机械手。
背景技术:
2.机械手作为机器人的一个重要部件因其能够抓取和释放物体都备受重视,现有技术中的机械手在抓取圆形或准圆形物体时缺乏柔性,从而使得其抓取物体和输送物体时稳定性不够。因此,需要设计一个高稳定性的柔性抓取机械手。
技术实现要素:
3.本发明需解决的技术问题是:针对现有技术存在的技术问题,本发明提供一种结构合理、采用单动力源驱动双自由度的复合手指运动、使复合手指同时具有主动变形和被动变形特征、抓取稳定性更高、可以柔性抓取准圆形物体的多自由度抓取机械手。
4.为了解决上述问题,本发明提出的解决方案为:一种准圆形物体的柔性多自由度抓取机械手,包括机械手本体架,固定装设在所述机械手本体架上的固定齿轮。
5.还包括转动装设在所述机械手本体架上且关于所述固定齿轮对称的复合手指a和复合手指,沿同一中心线自上而下依次装设在所述机械手本体架上的转向环b、螺旋弹簧b、双杆液压缸、螺旋弹簧a和转向环a(17);所述液压缸的两根活塞杆分别与所述螺旋弹簧a的上端和螺旋弹簧b的下端相连。
6.所述复合手指a和复合手指结构相同,均包括与所述固定齿轮外啮合装设的圆柱齿轮a,与所述圆柱齿轮a外啮合的圆柱齿轮b,与所述圆柱齿轮b外啮合的非完整齿轮,连杆a,连杆b,连杆c,扭转锁紧弹簧,柔性牵引绳a和柔性牵引绳b。
7.所述连杆a的两端分别与所述固定齿轮的圆心和所述圆柱齿轮a的圆心铰接相连;所述连杆b的两端分别与所述圆柱齿轮a的圆心和所述圆柱齿轮b的圆心铰接相连;所述连杆c的两端分别与所述圆柱齿轮b的圆心和所述非完整齿轮的圆心铰接相连;所述柔性牵引绳a的一端与所述非完整齿轮的圆心相连,另一端穿过所述转向环a后与所述螺旋弹簧a的下端相连;所述柔性牵引绳b的一端与所述圆柱齿轮b的圆心相连,另一端穿过所述转向环b后与所述螺旋弹簧b的上端相连;所述扭转锁紧弹簧的两端分别与所述连杆b和连杆c相连。
8.所述非完整齿轮中的啮合齿所对应的弧长为自身周长的一半。
9.进一步地,所述连杆c平行于所述双杆液压缸的轴线时,两个所述连杆a成钝角状态,所述连杆a与连杆b成钝角状态。
10.进一步地,所述螺旋弹簧a和螺旋弹簧b为拉压螺旋弹簧。
11.本发明与现有技术相比,具有如下优点和有益效果:本发明的一种准圆形物体的柔性多自由度抓取机械手设有复合手指a和复合手指b,每个复合手指有两个运动自由度,从而使得整个抓取机械手具有四个运动自由度,增加了抓取物体的灵活性;此外,本发明中的双杆液压缸的两根活塞杆分别通过螺旋弹簧a和螺旋弹簧b连接柔性牵引绳a和柔性牵引
绳b,因此由螺旋弹簧a和柔性牵引绳a组成的总牵引长度,以及由螺旋弹簧b和柔性牵引绳b组成的总牵引长度可以随柔性牵引绳a和柔性牵引绳b内部相对压力的大小而发生微小的改变,更好地适应被抓取物体的表面形状,提高了机械手整体的柔性。由此可知,本发明是一种结构合理、采用单动力源驱动双自由度的复合手指运动、使复合手指同时具有主动变形和被动变形特征、抓取稳定性更高、可以柔性抓取准圆形物体的多自由度抓取机械手。
附图说明
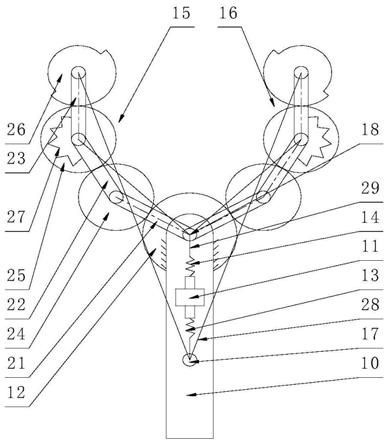
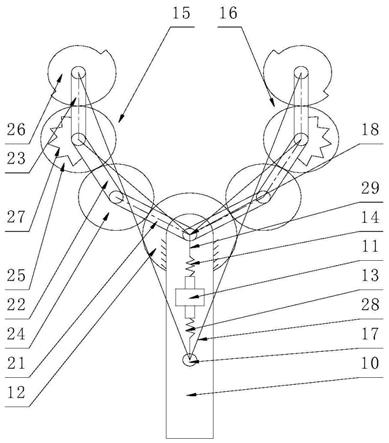
12.图1是本发明的一种准圆形物体的柔性多自由度抓取机械手的结构原理示意图。
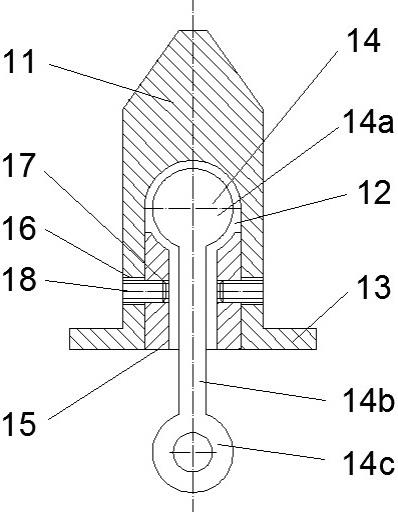
13.图中,10—机械手本体架;11—双杆液压缸;12—固定齿轮;13—螺旋弹簧a;14—螺旋弹簧b;15—复合手指a;16—复合手指b;17—转向环a;18—转向环b;21—连杆a;22—连杆b;23—连杆c;24—圆柱齿轮a;25—圆柱齿轮b;26—非完整齿轮;27—扭转锁紧弹簧;28—柔性牵引绳a;29—柔性牵引绳b。
具体实施方式
14.以下将结合附图和具体实施例对本发明作进一步详细说明。
15.如图1所示,本发明的一种准圆形物体的柔性多自由度抓取机械手,它包括机械手本体架10,固定装设在机械手本体架10上的固定齿轮12,转动装设在机械手本体架10上且关于固定齿轮12对称的复合手指a15和复合手指16,沿同一中心线自上而下依次装设在机械手本体架10上的转向环b18、螺旋弹簧b14、双杆液压缸11、螺旋弹簧a13和转向环a17;液压缸11的两根活塞杆分别与螺旋弹簧a13的上端和螺旋弹簧b14的下端相连。
16.复合手指a15和复合手指16结构相同,均包括与固定齿轮12外啮合装设的圆柱齿轮a24,与圆柱齿轮a24外啮合的圆柱齿轮b25,与圆柱齿轮b25外啮合的非完整齿轮26,连杆a21,连杆b22,连杆c23,扭转锁紧弹簧27,柔性牵引绳a28和柔性牵引绳b29。
17.连杆a21的两端分别与固定齿轮12的圆心和圆柱齿轮a24的圆心铰接相连;连杆b22的两端分别与圆柱齿轮a24的圆心和圆柱齿轮b25的圆心铰接相连;连杆c23的两端分别与圆柱齿轮b25的圆心和非完整齿轮26的圆心铰接相连;柔性牵引绳a28的一端与非完整齿轮26的圆心相连,另一端穿过转向环a17后与螺旋弹簧a13的下端相连;柔性牵引绳b29的一端与圆柱齿轮b25的圆心相连,另一端穿过转向环b18后与螺旋弹簧b14的上端相连;扭转锁紧弹簧27的两端分别与连杆b22和连杆c23相连。
18.非完整齿轮26中的啮合齿所对应的弧长为自身周长的一半。
19.连杆c23平行于双杆液压缸11的轴线时,两个连杆a21成钝角状态,连杆a21与连杆b22成钝角状态。
20.螺旋弹簧a13和螺旋弹簧b14为拉压螺旋弹簧。螺旋弹簧a13和螺旋弹簧b14的存在,使得由螺旋弹簧a13和柔性牵引绳a28组成的总牵引长度,以及由螺旋弹簧b14和柔性牵引绳b29组成的总牵引长度可以发生微小变化。例如当双杆液压缸11中的上端活塞杆伸长运动,降低了柔性牵引绳b29内部的拉力,从而使得柔性牵引绳b29和柔性牵引绳a28的相对拉力状态由“柔性牵引绳a28中的拉力小于柔性牵引绳b29中的拉力”转变为新的相对拉力状态,即“柔性牵引绳a28中的拉力大于柔性牵引绳b29中的拉力”,在这种相对拉力转变的情况下,柔性牵引绳b29可以同时驱动连杆a21、连杆b22和连杆c23共同运动,只不过柔性牵
引绳b29做大位移主运动,柔性牵引绳a28做小位移被动运动,从而连杆b22绕圆柱齿轮a24圆心向外转动,使得连杆c23绕圆柱齿轮b25的圆心向内转动,连杆a21绕固定齿轮12的圆心向内转动,从而通过主、被动运动的微小位移量增加复合手指a和复合手指b的柔性,更好地适应圆形物体和椭圆形物体的外形。
21.本发明的工作过程和工作原理如下:
22.双杆液压缸11的下端活塞杆收缩时,螺旋弹簧a13产生拉力,拉动柔性牵引绳a28,进而拉动非完整齿轮26的圆心,使得非完整齿轮26向里转动以便抓紧物体;双杆液压缸11的下端活塞杆伸长时,扭转锁紧弹簧27储存的弹性势能反向拉紧柔性牵引绳a28,非完整齿轮26向外转动,以便松开物体;双杆液压缸11的上端活塞杆收缩时,螺旋弹簧b14拉紧柔性牵引绳b29进而拉动圆柱齿轮b25的圆心,使得连杆b22向里转动以便抓紧物体;双杆液压缸11的上端活塞杆伸长时,圆柱齿轮a24和圆柱齿轮b25的重力反向拉紧柔性牵引绳b29使得连杆b22向外转动以便松开物体。
23.当抓取较小直径的物体时,双杆液压缸11的两根活塞杆可以同时收缩;当抓取中等直径的物体时,只需要双杆液压缸11下端的活塞杆收缩;当抓取较大直径的物体时,只需要双杆液压缸11上端的活塞杆收缩。
24.抓取物体时,扭转锁紧弹簧27一方面可以消除圆柱齿轮a24与圆柱齿轮b25、圆柱齿轮b25与非完整齿轮26之间的间隙使抓取更稳定,而且还可以根据柔性牵引绳a28与柔性牵引绳b29弹力的相对大小实现对非圆形物体的抓取。在抓取物体时,非完整齿轮26中的圆弧部分与被抓取物体的外部接触,从而增加对被抓取物体的接触弹性。
25.以上,仅为本发明的具体实施方式,但本发明的保护范围并不局限于此,任何不经过创造性劳动想到的变化或替换,都应该属于本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。