1.本发明涉及无人机技术领域,尤其涉及到一种反无人机目标跟踪反制系统。
背景技术:
2.随着科技的飞速发展,无人机被广泛应用在各个领域中,例如救灾、航拍和无人监控、巡检等。其给人们的生活带来便利的同时,也被一些不法分子或者非法飞手操控进入禁飞区扰乱民航飞行安全、干扰救援行动。且失控无人机极易造成意外事故和人民生命财产损失。所以需要对黑飞无人机采取有效的反制措施。目前的反制设备,虽然能通过光电设备对无人机进行识别,但检测距离受限会造成误识情况,或者采用雷达设备进行动目标检测,但单一采用雷达设备会由于其它空中目标干扰造成虚警率高的问题,另外,对无人机实现精准干扰和打击,且不造成能源浪费,就需要对无人机的通讯信号数据等进行快速捕获识别,发出干扰信号,并进行追踪和功率调节,现有的干扰系统一般在设定位置设置一些固定频率干扰设备,这样虽然起到了干扰效果,但对执行任务的无人机也会造成影响。
3.综上所述,提供一种干扰稳定性高、且检测范围广,打击更加精准且全面,且用户可进行远程智能管理的反无人机目标跟踪反制系统,是本领域技术人员急需解决的问题。
技术实现要素:
4.本方案针对上文提到的问题和需求,提出一种反无人机目标跟踪反制系统,其由于采取了如下技术方案而能够解决上述技术问题。
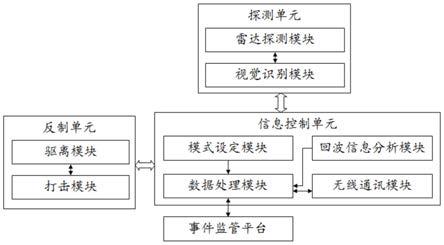
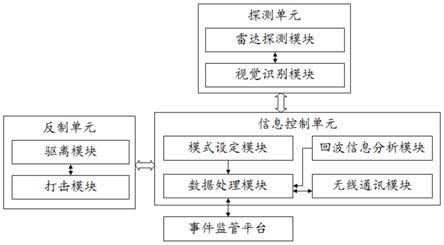
5.为实现上述目的,本发明提供如下技术方案:一种反无人机目标跟踪反制系统,包括:探测单元、信息控制单元、反制单元和事件监管平台;
6.所述探测单元用以对无人机进行探测、跟踪,并将探测和跟踪信息发送给所述信息控制单元;
7.所述信息控制单元对所述探测和跟踪信息进行分析,基于分析结果和管理人员设置的反制模式发送反制控制信号至所述反制单元;
8.所述反制单元用于对目标无人机进行干扰,迫使其悬停、返航或者击落,所述反制单元包括驱离模块和打击模块,所述驱离模块和所述打击模块与所述信息控制单元相连接;
9.所述事件监管平台用于接收所述信息控制单元定期发送的无人机探测和跟踪信息,并对无人机位置及反制信息进行可视化显示。
10.进一步地,所述探测单元包括雷达探测模块和视觉识别模块;
11.所述雷达探测模块用于检测目标坐标和跟踪轨迹,所述雷达探测模块采用一维电扫描三坐标雷达采集复杂背景下动目标的回波信号,并将所述回波信号发送给所述信息控制单元;
12.所述视觉识别模块包括高清可见光与红外双波段摄像机、采集控制装置和目标识别模块,当所述雷达探测模块检测到可疑目标无人机进入警戒区域时,立即发送信号至所
述采集控制装置,所述采集控制装置通过控制所述高清可见光与红外双波段摄像机对目标图像进行采集,所述目标识别模块根据所述目标图像对可疑目标无人机进行跟踪和识别,并通过将所述可疑目标无人机的坐标与合法无人机的实时坐标进行对比,判断是否为合法无人机,若为非法无人机则将采集到的视频图像实时传递给所述事件监管平台。
13.更进一步地,所述信息控制单元包括模式设定模块、数据处理模块、回波信息分析模块和无线通讯模块;
14.所述回波信息分析模块通过对所述回波信号的多普勒频移来分析动目标的目标信息,并根据所述目标信息进行分类识别,判断是否为目标无人机,同时将地物杂波进行滤除;
15.所述模式设定模块用于设定反制模式,所述反制模式包括自动反制和指令输入反制;
16.所述数据处理模块用于获取所述回波信息分析模块的目标分析结果,并根据所述目标分析结果发送跟踪信号至所述视觉识别模块,所述视觉识别模块对目标无人机的合法性进行判断,所述数据处理模块依据所述视觉识别模块的判断结果通过所述无线通讯模块发送报警信息和视频图像信息。
17.更进一步地,所述驱离模块包括射频干扰装置,所述射频干扰装置用于通过大功率电磁干扰信号干扰目标无人机的遥控、定位和图传系统以及目标无人机通信链路,所述射频干扰装置包括电磁信号发射模块、功率调整模块和执行模块,所述执行模块用于根据反制控制指令通过电磁干扰模型控制所述电磁信号发射模块发射电磁干扰信号,所述功率调整模块与所述电磁信号发射模块相连接用于对电磁干扰信号的功率进行调整。
18.更进一步地,所述打击模块包括击落装置和控制模块,所述击落装置包括激光发射器、火炮和网枪,所述控制模块获取目标的运动跟踪轨迹和位置并根据用户设置的击落方式对目标无人机进行打击捕获。
19.更进一步地,所述事件监管平台包括控制指令输入模块、可视化模块和信息查询模块;
20.所述控制指令输入模块用于管理员输入远程信息更新指令和驱离或击落控制指令,所述控制指令输入模块包括智能交互面板和按键模组;
21.所述可视化模块用于对无人机的编号、机型、任务名称以及实时坐标位置信息进行显示,所述可视化模块包括智能显示屏和信息处理服务器,所述控制指令输入模块和所述智能显示屏均与所述信息处理服务器;
22.所述信息查询模块与信息数据库连接,管理员身份验证成功后可对所述反制单元工作状态和报警历史记录和报警统计进行查询,所述信息查询模块包括查询列表和报警事件管理模块,所述报警事件管理模块用于对报警事件的历史数据进行记录和周期统计。
23.更进一步地,所述电磁干扰模型包括信号侦测分析模块和跟踪引导模块,所述侦测分析模块用于对无线信号采集设备采集的目标无人机信号进行分析,获取跳频信息,所述跟踪引导模块根据所述跳频信息引导电磁信号发射模块的干扰机将干扰功率瞄准目标无人机当前通信频率并进行实时跟踪干扰。
24.更进一步地,所述获取跳频信息包括:利用大容量无线信号采集设备在相关频段对无人机与遥控器组成的无人飞行器系统数据信号进行连续采集并记录;对数据信号进行
时域特征分析,所述时域特征表征了数据信号的起始、空闲和控制状态,起始状态为连续信号,控制状态为周期性出现脉冲信号;对数据信号进行频域特征分析,起始状态与空闲状态时间短且无周期,由控制状态的控制信号进行频谱分析获取跳频信息;然后根据所述跳频信息使干扰信号与通信信号在时域上一致和使干扰信号有与通信信号相似的频域特性,以保证干扰能量尽量的通过接收机的选择系统,实现跟踪干扰;可根据干扰信号功率与通信信号功率的比值确定有效干扰距离,有效干扰距离与所述比值呈反比关系,所述比值越低,则有效干扰距离越大。
25.更进一步地,所述目标识别模块根据所述目标图像对可疑目标无人机进行跟踪和识别包括使用位置滤波器对目标进行定位,并以上一帧定位位置为中心,获取目标候选区域并分别提取fhog、lbp与cn特征,对不同特征使用三个独立的相关滤波器进行跟踪,预测目标框由各跟踪器的定位结果与上一帧的目标尺度确定;计算不同特征跟踪器的置信度,将各跟踪器的定位结果按照其置信度进行融合,获取目标可靠位置作为第当前帧的位置估计;分别在目标宽度和高度方向采样,并使用相关滤波器估计目标宽度和高度的最佳缩放系数,进而计算目标宽高;由定位结果和尺度缩放系数可以确定目标区域,根据当前帧的预测区域以及各跟踪器的平均置信度对跟踪模型自适应更新。
26.从上述的技术方案可以看出,本发明的有益效果是:本发明干扰稳定性高、且检测范围广,打击更加精准且全面,且用户可进行远程智能管理。
27.除了上面所描述的目的、特征和优点之外,下文中将结合附图对实施本发明的最优实施例进行更详尽的描述,以便能容易地理解本发明的特征和优点。
附图说明
28.为了更清楚地说明本发明实施例或现有技术中的技术方案,下文将对本发明实施例或现有技术描述中所需要使用的附图作简单地介绍,其中,附图仅仅用于展示本发明的一些实施例,而非将本发明的全部实施例限制于此。
29.图1为本发明一种反无人机目标跟踪反制系统的组成结构示意图。
30.图2为本发明中事件监管平台的组成结构示意图。
31.图3为本发明中驱离模块的组成结构示意图。
32.图4为本发明中视觉识别模块的组成结构示意图。
33.图5为本发明中打击模块的组成结构示意图。
34.图6为本实施例中目标跟踪过程的具体步骤示意图。
具体实施方式
35.为了使得本发明的技术方案的目的、技术方案和优点更加清楚,下文中将结合本发明具体实施例的附图,对本发明实施例的技术方案进行清楚、完整地描述。附图中相同的附图标记代表相同的部件。需要说明的是,所描述的实施例是本发明的一部分实施例,而不是全部的实施例。基于所描述的本发明的实施例,本领域普通技术人员在无需创造性劳动的前提下所获得的所有其他实施例,都属于本发明保护的范围。
36.本发明提供了一种干扰稳定性高、且检测范围广,打击更加精准且全面,且用户可进行远程智能管理的反无人机目标跟踪反制系统。如图1至图6所示,该系统包括:探测单
元、信息控制单元、反制单元和事件监管平台。
37.因为在无人机反制领域中,空中目标跟踪是无人机监测、跟踪与拦截过程中的重要环节。而无人机通常具有跟踪场景复杂、运动速度快、飞行轨迹多变等特点。故仅利用雷达探测与无源定位技术进行跟踪处理容易受到杂波信号干扰。将其和基于视觉的空中目标跟踪技术相结合进行无人机目标检测跟踪,可更准确地实现目标定位。本系统中,所述探测单元用以对无人机进行探测、跟踪,并将探测和跟踪信息发送给所述信息控制单元。所述探测单元包括雷达探测模块和视觉识别模块;所述雷达探测模块用于检测目标坐标和跟踪轨迹,所述雷达探测模块采用一维电扫描三坐标雷达采集复杂背景下动目标的回波信号,并将所述回波信号发送给所述信息控制单元;所述视觉识别模块包括高清可见光与红外双波段摄像机、采集控制装置和目标识别模块,当所述雷达探测模块检测到可疑目标无人机进入警戒区域时,立即发送信号至所述采集控制装置,所述采集控制装置通过控制所述高清可见光与红外双波段摄像机对目标图像进行采集,所述目标识别模块根据所述目标图像对可疑目标无人机进行跟踪和识别,并通过将所述可疑目标无人机的坐标与合法无人机的实时坐标进行对比,判断是否为合法无人机,若为非法无人机则将采集到的视频图像实时传递给所述事件监管平台。
38.所述信息控制单元对所述探测和跟踪信息进行分析,基于分析结果和管理人员设置的反制模式发送反制控制信号至所述反制单元。
39.所述信息控制单元包括模式设定模块、数据处理模块、回波信息分析模块和无线通讯模块;所述回波信息分析模块通过对所述回波信号的多普勒频移来分析动目标的目标信息,并根据所述目标信息进行分类识别,判断是否为目标无人机,同时将地物杂波进行滤除;所述模式设定模块用于设定反制模式,所述反制模式包括自动反制和指令输入反制;所述数据处理模块用于获取所述回波信息分析模块的目标分析结果,并根据所述目标分析结果发送跟踪信号至所述视觉识别模块,所述视觉识别模块对目标无人机的合法性进行判断,所述数据处理模块依据所述视觉识别模块的判断结果通过所述无线通讯模块发送报警信息和视频图像信息。
40.如图6目标跟踪过程示意图所示,所述目标识别模块根据所述目标图像对可疑目标无人机进行跟踪和识别包括:a.使用位置滤波器对目标进行定位,并以上一帧定位位置为中心,获取目标候选区域并分别提取fhog、lbp与cn特征;b.对不同特征使用三个独立的相关滤波器进行跟踪,预测目标框由各跟踪器的定位结果与上一帧的目标尺度确定;c.计算不同特征跟踪器的置信度,将各跟踪器的定位结果按照其置信度进行融合,获取目标可靠位置作为第当前帧的位置估计;d.分别在目标宽度和高度方向采样,并使用相关滤波器估计目标宽度和高度的最佳缩放系数,进而计算目标宽高,并由定位结果和尺度缩放系数可以确定目标区域,根据当前帧的预测区域以及各跟踪器的平均置信度对跟踪模型自适应更新。
41.所述反制单元用于对目标无人机进行干扰,迫使其悬停、返航或者击落,所述反制单元包括驱离模块和打击模块,所述驱离模块和所述打击模块与所述信息控制单元相连接。
42.在本系统中,所述驱离模块包括射频干扰装置,所述射频干扰装置用于通过大功率电磁干扰信号干扰目标无人机的遥控、定位和图传系统以及目标无人机通信链路,所述
射频干扰装置包括电磁信号发射模块、功率调整模块和执行模块,所述执行模块用于根据反制控制指令通过电磁干扰模型控制所述电磁信号发射模块发射电磁干扰信号,所述功率调整模块与所述电磁信号发射模块相连接用于对电磁干扰信号的功率进行调整。
43.所述电磁干扰模型包括信号侦测分析模块和跟踪引导模块,所述侦测分析模块用于对无线信号采集设备采集的目标无人机信号进行分析,获取跳频信息,所述跟踪引导模块根据所述跳频信息引导电磁信号发射模块的干扰机将干扰功率瞄准目标无人机当前通信频率并进行实时跟踪干扰。其中,所述获取跳频信息包括:利用大容量无线信号采集设备在相关频段对无人机与遥控器组成的无人飞行器系统数据信号进行连续采集并记录;对数据信号进行时域特征分析,所述时域特征表征了数据信号的起始、空闲和控制状态,起始状态为连续信号,控制状态为周期性出现脉冲信号;对数据信号进行频域特征分析,起始状态与空闲状态时间短且无周期,由控制状态的控制信号进行频谱分析获取跳频信息;然后根据所述跳频信息使干扰信号与通信信号在时域上一致和使干扰信号有与通信信号相似的频域特性,以保证干扰能量尽量的通过接收机的选择系统,实现跟踪干扰;可根据干扰信号功率与通信信号功率的比值确定有效干扰距离,有效干扰距离与所述比值呈反比关系,所述比值越低,则有效干扰距离越大。在跳频通信的一个频点驻留时间内,需要先对跳频信号进行截获分析并使干扰功率对准当前频率,当目标无人机的跳频系统频率跳变之后,也要随之改变干扰频率,使得干扰图案与跳频图案基本一致,这样才能保证精准干扰。
44.所述打击模块包括击落装置和控制模块,所述击落装置包括激光发射器、火炮和网枪,所述控制模块获取目标的运动跟踪轨迹和位置并根据用户设置的击落方式对目标无人机进行打击捕获。
45.所述事件监管平台用于接收所述信息控制单元定期发送的无人机探测和跟踪信息,并对无人机位置及反制信息进行可视化显示。所述事件监管平台包括控制指令输入模块、可视化模块和信息查询模块;所述控制指令输入模块用于管理员输入远程信息更新指令和驱离或击落控制指令,所述控制指令输入模块包括智能交互面板和按键模组;所述可视化模块用于对无人机的编号、机型、任务名称以及实时坐标位置信息进行显示,所述可视化模块包括智能显示屏和信息处理服务器,所述控制指令输入模块和所述智能显示屏均与所述信息处理服务器;所述信息查询模块与信息数据库连接,管理员身份验证成功后可对所述反制单元工作状态和报警历史记录和报警统计进行查询,所述信息查询模块包括查询列表和报警事件管理模块,所述报警事件管理模块用于对报警事件的历史数据进行记录和周期统计。
46.应当说明的是,本发明所述的实施方式仅仅是实现本发明的优选方式,对属于本发明整体构思,而仅仅是显而易见的改动,均应属于本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。