1.本发明涉及物流设备技术领域,具体为一种立体库搬运机器人安全防护机构。
背景技术:
2.现有的物流行业发展快速,特别是一些运货用搬运栽机等广为用之,而且会经常用到大型的立体货架等立体仓库中,对于这种存货的立体库而言,是需要对搬运机器人进行上下升降来辅助搬运机器人工作的堆垛机的,但是现有的堆垛机结构对搬运机器人打的防护性不够优化,会跌跌宕宕,容易造成搬运机器人货物的跌落,从而带来安全隐患。
3.如申请号为201721154177.2的中国专利公开了一种堆垛机载货台安全防护装置,包括横梁和堆垛机载货台主体,所述横梁的下端设有防水薄膜固定盒,且防水薄膜固定盒的一侧设有钢丝绳分线装置,所述横梁的上方设有滚动轴,且滚动轴的外表面设有钢丝绳,所述堆垛机滑轨的内表面设有滑轨连接块,所述堆垛机载货台主体的外表面设有加密板筋,且堆垛机载货台主体的下端设有橡胶底座。该现有的堆垛机防护装置虽然本身具有很好的防护性,但对于在其上要承载的搬运机器人而言,缺少有效的防护,容易造成安全隐患。
技术实现要素:
4.本发明的目的是提供一种防护性更好的立体库搬运机器人安全防护机构。
5.本发明的上述技术目的是通过以下技术方案得以实现的:包括堆垛机承载台,所述堆垛机承载台包括左侧板、右侧板以及所述左侧板和右侧板底部之间连接有的底侧板,所述左侧板的右侧部位上安装有供立体库搬运机器人的左侧车轮部分前后行走的左导轨总成,所述右侧板的左侧部位上安装有供立体库搬运机器人的右侧车轮部分前后行走的右导轨总成,所述左导轨总成具有能下陷形成供立体库搬运机器人的左侧车轮部分向下置入以降低立体库搬运机器人重心又能上升供立体库搬运机器人行走的左变形部分,所述右导轨总成具有能下陷形成供立体库搬运机器人的右侧车轮部分向下置入以降低立体库搬运机器人重心又能上升供立体库搬运机器人行走的右变形部分。
6.作为对本发明的优选,所述左导轨总成包括所述左侧板的右侧板面安装有的前后间隔分布的左前固定导轨和左后固定导轨以及相对所述左前固定导轨和左后固定导轨能移动的左变形导轨,所述左变形导轨其中有一段架设在所述左前固定导轨和左后固定导轨上的段落为所述左变形部分,所述左前固定导轨和左后固定导轨之间在前后间形成左侧间隔空间并供所述左变形部分下陷和上升,所述右导轨总成包括所述右侧板的左侧板面安装有的前后间隔分布的右前固定导轨和右后固定导轨以及相对所述右前固定导轨和右后固定导轨能移动的右变形导轨,所述右变形导轨其中有一段架设在所述右前固定导轨和右后固定导轨上的段落为右变形部分,所述右前固定导轨和右后固定导轨之间在前后间形成右侧间隔空间并供所述右变形部分下陷和上升。
7.作为对本发明的优选,所述左变形导轨和所述右变形导轨均为橡胶导轨。
8.作为对本发明的优选,所述左变形导轨的背面垫设有一条左刚性链条,所述右变形导轨的背面垫设有一条右刚性链条。
9.作为对本发明的优选,所述堆垛机承载台上安装有处在所述左前固定导轨和左后固定导轨之间并能承载和牵引所述左变形部分下陷和上升的左中升降支撑导轨,所述堆垛机承载台上安装有处在所述右前固定导轨和右后固定导轨之间并能承载和牵引所述右变形部分下陷和上升的右中升降支撑导轨。
10.作为对本发明的优选,所述堆垛机承载台上安装有用于对所述左变形导轨前后两端部分拉拽并使得所述左变形导轨始终处于张紧状态的左侧跟随牵拉装置,所述堆垛机承载台上安装有用于对所述右变形导轨前后两端部分拉拽并使得所述右变形导轨始终处于张紧状态的右侧跟随牵拉装置。
11.作为对本发明的优选,所述左前固定导轨的后端部分铰接有左前引导导轨,所述左后固定导轨的前端部分铰接有左后引导导轨,所述左前引导导轨和所述左后引导导轨分别处在左中升降支撑导轨的前后侧,所述右前固定导轨的后端部分铰接有右前引导导轨,所述右后固定导轨的前端部分铰接有右后引导导轨,所述右前引导导轨和所述右后引导导轨分别处在右中升降支撑导轨的前后侧。
12.作为对本发明的优选,所述左前引导导轨连接有阻止其从水平状态向下倾倒的第一弹性缓冲支撑装置,所述左后引导导轨连接有阻止其从水平状态向下倾倒的第二弹性缓冲支撑装置,所述右前引导导轨连接有阻止其从水平状态向下倾倒的第三弹性缓冲支撑装置,所述右后引导导轨连接有阻止其水平状态向下倾倒的第四弹性缓冲支撑装置。
13.作为对本发明的优选,所述左中升降支撑导轨的底部固定有向前延伸并能向上抵靠住所述左前引导导轨的左前延伸抬板,所述左升降支撑导轨的底部固定有向后延伸并能向上抵靠住所述左后引导导轨的左后延伸抬板。
14.作为对本发明的优选,所述右中升降支撑导轨的底部固定有向前延伸并能向上抵靠住所述右前引导导轨的右前延伸抬板,所述右中升降支撑导轨的底部固定有向后延伸并能向上抵靠住所述右后引导导轨的右后延伸抬板。
15.本发明的有益效果:本技术对于堆垛机的设计改良,使得堆垛机导轨部分的结构不仅可以用于搬运机器人的行走,而且还能起到更好地防护作用,使得堆垛机在升降、启停等过程得到更好地保护,并且不会货物掉落造成安全事情的情况发生,安全级别高;防护性更好,减噪减振,对设备对货物对人员的安全性都是有进一步提升的。
附图说明
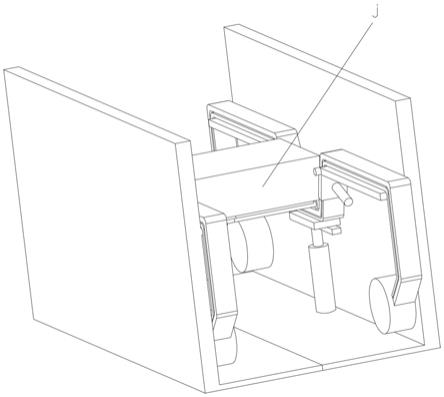
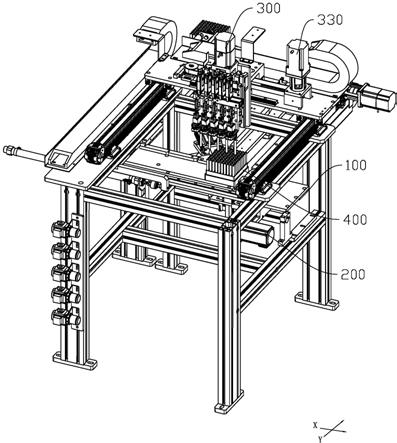
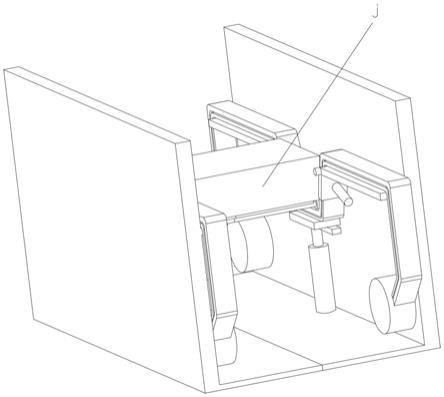
16.图1为实施例1中未停放有搬运机器人时的立体结构示意图;图2为图1另一视角的立体结构示意图;图3为图1中钢结构右侧部分在导轨变形过程中的正视图;图4为图1中停放有搬运机器人时的立体结构示意图;图5为图4中结构移去左侧部分结构后的立体结构示意图;图6为左前固定导轨、左刚性链条和左变形导轨其中某个段落上下分开后的立体结构示意图;图7为图6中分开的结构组装在一起后的立体结构示意图;
图8为图6中的左刚性链条优化后的立体结构示意图。
具体实施方式
17.以下具体实施例仅仅是对本发明的解释,其并不是对本发明的限制,本领域技术人员在阅读完本说明书后可以根据需要对本实施例做出没有创造性贡献的修改,但只要在本发明的权利要求范围内都受到专利法的保护。
18.实施例,如图1
‑
8所示,本实施例实质上是对堆垛机的进一步改造而形成的,而且这种结构是专门为左右两侧有车轮的搬运机器人而设计的,具体为:一种立体库搬运机器人安全防护机构,包括堆垛机承载台1,所述堆垛机承载台1包括左侧板11、右侧板12以及所述左侧板11和右侧板12底部之间连接有的底侧板13,这也是常规的堆垛机承载台1u型构造,这种u型构造包围的区域内就是停放搬运机器人的,一方面,现有的这种堆垛机并没有很好地对机器人进行限位,另一方面,没有对机器人在堆垛机的运行过程中有效进行防护从而引发货物跌落砸到人或者设备等安全事故,特别对于立体库而言,高度是比较高的,万一有货物跌落是比较危险的,但如果只注意完全,每个搬运机器人放很少的货物,这样对于运输效率来说,就太消耗成本了,所以有了如下的改造,即所述左侧板11的右侧部位上安装有供立体库搬运机器人j的左侧车轮部分前后行走的左导轨总成,所述右侧板12的左侧部位上安装有供立体库搬运机器人的右侧车轮部分前后行走的右导轨总成,所述左导轨总成具有能下陷形成供立体库搬运机器人j的左侧车轮部分向下置入以降低立体库搬运机器人j重心又能上升供立体库搬运机器人j行走的左变形部分a0,所述右导轨总成具有能下陷形成供立体库搬运机器人j的右侧车轮部分向下置入以降低立体库搬运机器人j重心又能上升供立体库搬运机器人j行走的右变形部分b0。左变形部分a0和右变形部分b0的设计要点在于,他们向下塌陷形成开口朝上的u型包围结构,这种结构首先,可以使得立体库搬运机器人j原本在导轨上的高度下降,重心就能下沉会极大提升稳定性,其次,这种包覆的结构,使得对立体库搬运机器人j提供了极好的外围的限位,对立体库搬运机器人j以及立体库搬运机器人j上的货物都有了很好的保护,这种塌陷的状态是在堆垛机升降的过程中采用的,但当堆垛机到达指定的货架高度位置以后,左变形部分a0和右变形部分b0是要恢复到水平平直的位置的,因为要供立体库搬运机器人j行走。
19.进一步优化,所述左导轨总成包括所述左侧板11的右侧板面安装有的前后间隔分布的左前固定导轨a1和左后固定导轨a2以及相对所述左前固定导轨a1和左后固定导轨a2能移动的左变形导轨x,所述左变形导轨x其中有一段架设在所述左前固定导轨a1和左后固定导轨a2上的段落为所述左变形部分a0,所述左前固定导轨a1和左后固定导轨a2之间在前后间形成左侧间隔空间a12并供所述左变形部分a0下陷和上升,所述右导轨总成包括所述右侧板12的左侧板面安装有的前后间隔分布的右前固定导轨b1和右后固定导轨b2以及相对所述右前固定导轨b1和右后固定导轨b2能移动的右变形导轨y,所述右变形导轨y其中有一段架设在所述右前固定导轨b1和右后固定导轨b2上的段落为右变形部分b0,所述右前固定导轨b1和右后固定导轨b2之间在前后间形成右侧间隔空间b12并供所述右变形部分b0下陷和上升。这样提供了一个基本框架结构,左前固定导轨a1和左后固定导轨a2可以采用钢铁的刚性导轨作为主要固定的支撑部分,并优选采用钢铁制的导轨,并且应优选不易变形的一体式结构,或者其他不易变形的稳定结构样式,至少左前固定导轨a1和左后固定导轨
a2供机器人行走的段落是钢性的直线型一体结构,供机器人支撑和行走的,右前固定导轨b1和右后固定导轨b2也应采用左侧的这种导轨结构设计。在这种框架下,所述左变形导轨x和所述右变形导轨y优选均采用橡胶导轨,橡胶导轨不仅有很好的支撑性,还能减振减噪,而且比较重要的一点在于其具有一定的柔韧性能提供变形的能力,能完成下陷和上升的动作。
20.作为优选,所述左变形导轨x的背面垫设有一条左刚性链条m,所述右变形导轨y的背面垫设有一条右刚性链条n,由于单独的橡胶导轨在承载大重量时上限会有所限制,这里的刚性链条指的是链条的材质是钢铁或者硬质塑料等钢条材质制作的,即每个链节应该是刚性的,但是链节之间还是铰接的可活动,因为链节之间活动才能产生变形,这样刚性链条不仅可以起到更好地承托,同时链条本身也是能变形转弯的,就能配合变形导轨的变形,左变形导轨x和左刚性链条m可以上下连接住,右变形导轨y和右刚性链条n可以上下连接住,连接方式,例如直接将左变形导轨x粘结在左刚性链条m的链节的链板4上侧,当然或者通过夹子或者销轴等现有的连接结构5将左变形导轨x和左刚性链条m的链板4连接即可,连接的部位间隔开,不用太多,不然会影响两者的变形能力,右变形导轨y和右刚性链条n之间参照左侧的结构连接即可。简单来说,左变形导轨x和右变形导轨y侧是垫有一条硬质材料制作的但又能跟随其变形的衬垫层,由于多了这个衬垫层,左变形导轨x是通过左刚性链条m支撑架设在左前固定导轨a1和左后固定导轨a2上的,可以理解为,左刚性链条m是夹在左变形导轨x跟左前固定导轨a1和左后固定导轨a2之间的,相应的右刚性链条n是夹在右变形导轨y跟右前固定导轨b1和右后固定导轨b2之间的,为什么选择链条的结构,原因还有在于,链条还具有很好地移动能力,因为链条是的链节上都是具有滚子7的,可以在导轨上非常好的支撑和移动,以左侧为例,左前固定导轨a1和左后固定导轨a2上可以形成凸起的导轨部6,导轨部6的左右两侧都是空的台阶,正好供左刚性链条m的左右两侧链板4的下部放入并在左右侧分别限位,而左刚性链条m的滚子正好支撑在凸起的导轨部6上,左右两侧有链板限位并通过滚子的滚动,使得链条非常好的前后移动,而左变形导轨x在链板的上侧部位得到支撑,不会影响到滚子,因为滚子是低于链板的上侧部位,当然,因为左变形导轨x是偏柔性材质可能会卡入到左右链板之间并挤压到滚子,所以左刚性链条m的主体可以采用现有的滚子链条结构,即包括若干铰接的链节,每个链节左右有链板,左右的链板间通过销轴连接住并在销轴上套设滚子,当然相邻的链节之间还有外链板同时连接住销轴上使得两个链节铰接住,这里不再赘述,因为具体的链条还用不同的细节设计,本实施例只要用到他们的这些基本结构即可,为了更好地使用,在左刚性链条m的主体上再进一步进行改造,即在现有的链条结构基础上改进,如左刚性链条m的单个链节的左右两侧链板的上侧之间可以通过焊接固定方式固定有位于滚子上方并用于接触并支撑左变形导轨x下侧的防护垫板8,防护垫板8中间平整的平整部81并且平整部81的前后端形成有圆弧形的圆角过渡部82,这样在变形时减少对左变形导轨x的磨损,右刚性链条n采用跟左刚性链条m一样的链条结构设计,右前固定导轨b1和右后固定导轨b2采用跟左前固定导轨a1和左后固定导轨a2一样的结构设计。这样的话,左变形导轨x也可以直接跟防护垫板8连接住,通过现有的螺栓、销轴、粘结等方式,可以不用在链板上进行连接,连接的效果会更好些。当然,防护垫板8可以采用钢铁板用用上述焊接方式固定在链条上,也可以采用塑胶板通过其他现有方式进行固定在链条上,塑胶板对于变形导轨的支撑强度稍弱,但是在变形过程中的转角等部位产生较大形变
时对于结构的保护效果会更好些,这两种都是较好的优选方式。
21.进一步,所述堆垛机承载台1上安装有处在所述左前固定导轨a1和左后固定导轨a2之间并能承载和牵引所述左变形部分a0下陷和上升的左中升降支撑导轨a3,所述堆垛机承载台1上安装有处在所述右前固定导轨b1和右后固定导轨b2之间并能承载和牵引所述右变形部分b0下陷和上升的右中升降支撑导轨b3。左中升降支撑导轨a3和右中升降支撑导轨b3均可以采用钢铁的前后延伸是导轨结构,他们的上表面可以分别跟左变形部分a0和右变形部分b0的背面部分也即下侧面部分连接住,左中升降支撑导轨a3和右中升降支撑导轨b3主要是提供升降变形的动力,同时也是为了更好地在搬运机器人运行过程中起到更好地承载。左中升降支撑导轨a3和右中升降支撑导轨b3可以通过连接气压缸或者电机等升降结构s进行驱动。当然,在有衬垫层的结构基础上,例如,左变形导轨x下侧是有左刚性链条m的情况下,则将左变形部分a0下侧的左刚性链条m所在的那部分跟左中升降支撑导轨a3直接连接住,可以将左刚性链条m的链板跟左中升降支撑导轨a3等通过现有的焊接、捆绑等固定方式连接住即可, 使得升降结构s先带着左中升降支撑导轨a3升降,左中升降支撑导轨a3又继而拖着左刚性链条m升降来带动左变形部分a0上升和下凹完成变形,当然,如果没有左刚性链条m的情况下,左中升降支撑导轨a3也可以直接连接左变形部分a0靠中间的部分进行牵引,这里需要注意的是,左变形部分a0上升和下凹过程中,其靠中间的部分是其不太会形变的,因为左中升降支撑导轨a3是平直的状态,靠中间的部分是跟左中升降支撑导轨a3连接的,所以这部分至少上下升降来产生变形的动力源,变形的是靠中间的部分前后两侧的段落,会随着左变形部分a0靠中间的部分的升降产生形变,下凹会形成u型的包围槽结构,上升后变平。左中升降支撑导轨a3采用钢制的导轨即可,可以跟气缸等升降结构s的升降杆连接即可完成升降和支撑的作业。右中升降支撑导轨b3与右变形部分b0的连接结构以及右中升降支撑导轨b3本身的升降实现的结构都可以参照左侧进行设计即可并跟左侧结构镜像设计为宜。
22.当然,单独的左中升降支撑导轨a3和右中升降支撑导轨b3的驱动效果并不是很好,因为在从下陷回复到上升的过程中,导轨总成两侧没有控制的情况,会使得两侧回位出现一定阻碍,所以作如下设计,所述堆垛机承载台1上安装有用于对所述左变形导轨x前后两端部分拉拽并使得所述左变形导轨x始终处于张紧状态的左侧跟随牵拉装置,左侧跟随牵拉装置跟随左中升降支撑导轨a3的升降动作进行拉扯左变形导轨x以保持左变形导轨x的张紧状态,左侧跟随牵拉装置可以采用电动辊筒,如果是有衬有刚性链条的情况下,可以通过链轮配合电机的构造实现,当然,在小型的堆垛机上,也可以直接通过气缸等直接连接端部进行牵拉,上述电动辊筒、电机或者气缸等牵拉驱动结构q可以通过现有的自动控制设备进行控制,并且配合升降结构s升降进行操作,使得变形导轨始终处于张紧状态,例如升降结构s下降,则牵拉驱动结构q应该放松变形导轨,当升降结构s上升,则牵拉驱动结构q收紧变形导轨。相应地,所述堆垛机承载台1上安装有用于对所述右变形导轨y前后两端部分拉拽并使得所述右变形导轨y始终处于张紧状态的右侧跟随牵拉装置,右侧跟随牵拉装置的设计可以采用左侧跟随牵拉装置的设计。
23.进一步优选,所述左前固定导轨a1的后端部分铰接有左前引导导轨a11,所述左后固定导轨a2的前端部分铰接有左后引导导轨a21,所述左前引导导轨a11和所述左后引导导轨a21分别处在左中升降支撑导轨a3的前后侧,一方面是为了增加中间部分的长度,使得机
器人的停的位置的余量更多,另一方面也是为了在下陷的过程中,使得机器人有初始导向限位的效果,并能是下陷形状更接近于倒置的等腰梯形结构,具有更好的包覆效果。上述的这些引导导轨也可以都采用钢铁制导轨。同样地,所述右前固定导轨b1的后端部分铰接有右前引导导轨b11,所述右后固定导轨b2的前端部分铰接有右后引导导轨b21,所述右前引导导轨b11和所述右后引导导轨b21分别处在右中升降支撑导轨b3的前后侧。铰接结构采用现有的铰接连接的结构即可。
24.在上述优选的方案中,作进一步改进:所述左前引导导轨a11连接有阻止其从水平状态向下倾倒的第一弹性缓冲支撑装置t1,所述左后引导导轨a21连接有阻止其从水平状态向下倾倒的第二弹性缓冲支撑装置t2,所述右前引导导轨b11连接有阻止其从水平状态向下倾倒的第三弹性缓冲支撑装置t3,所述右后引导导轨b21连接有阻止其水平状态向下倾倒的第四弹性缓冲支撑装置t4,这四个弹性缓冲支撑装置的目的在于,保证下陷过程中具有对机器人有向上的缓冲支撑,防止急速下陷带来的安全隐患和机械损伤,这些弹性缓冲支撑装置可以采用现有的阻尼器,但他们的阻尼能力是不足以撼动下陷的拉伸驱动力的,因为最终还是需要下陷的。
25.进一步优化,所述左中升降支撑导轨a3的底部固定有向前延伸并能向上抵靠住所述左前引导导轨a11的左前延伸抬板a31,所述左升降支撑导轨a3的底部固定有向后延伸并能向上抵靠住所述左后引导导轨a21的左后延伸抬板a32;所述右中升降支撑导轨b3的底部固定有向前延伸并能向上抵靠住所述右前引导导轨b11的右前延伸抬板b31,所述右中升降支撑导轨b3的底部固定有向后延伸并能向上抵靠住所述右后引导导轨b21的右后延伸抬板b32。
26.因为在有延伸板的情况下,在变形导轨上升回位至水平状态后,升降机构s提供足够向上的支撑力并借助延伸板来使得引导导轨回位到水平状态下具有足够的支撑力来供机器人支撑行走,这样,阻尼器的阻力力相应就不用设置太大,也就不会影响下陷防护状态的动作。
27.整个结构的设计思路比较明确,就是利用变形的导轨在堆垛机升降或者横移等过程中,变形向下凹陷使得载货的搬运机器人被包覆住导轨形成的包围结构中,而当搬运机器人需要进行搬运时,导轨变形恢复平直状态即可。
28.以上所述,仅为本发明的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,可轻易想到各种等效的修改或替换,这些修改或替换都应涵盖在本发明的保护范围之内。因此,本发明的保护范围应以权利要求的保护范围为准。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。