1.本发明属于导航定位技术领域,特别是指一种基于红外基准点的室内与地下空间定位方法。
背景技术:
2.人类活动正在从室外向室内、地下等空间延伸,在这些场景中由于受到建筑结构或地表的遮挡,卫星导航信号不可穿透或信号很弱,传统的卫星导航技术不可用,如何在室内/地下空间中获取连续精确的定位信息成为一个技术难题。
3.针对于室内和地下场景的定位问题,国内外开展了大量技术研究,包括利用伪卫星基站、uwb基站、5g通信基站以及声波基站的定位技术,利用特定无线电信号波形或声波低传播速率的特征实现复杂多径环境下的精确测量。但上述技术在应用中存在两个不足:一是由于无线电信号和声学信号在存在许多遮蔽体的室内和地下空间传播过程中,衍射、绕射等非视距传播信号相对于直射投射信号的衰减不大,致使接收机难以识别和区分非视距信号,特别是在存在大量移动人、物体的环境中,接收机到的非视距信号观测噪声方差存在较大波动,难以通过信号特征门限的方式准确识别。二是对于利用双向或多向无线测距获取基站和接收机几何距离的技术,由于需要区分不同接收机的回传信号并避免接收机间的远近效应,在定位网络中必然存在接收机容量和定位频率间的矛盾。
技术实现要素:
4.有鉴于此,本发明的目的在于提供一种基于红外基准点的室内与地下空间定位方法,本方法可面向可预先测绘安装点位置并可预先安装设施的室内、地下等应用场景,实现大容量、具有红外摄像头的接收机可连续获取自身的定位信息。
5.为了实现上述目的,本发明采用的技术方案为:
6.一种基于红外基准点的室内与地下空间定位方法,包括以下步骤:
7.(1)在室内或地下空间的顶部区域以非对称方式设置n个安装点,n≥4;每个安装点安装1个点状红外节点设备,观测区域内可观测到不低于4个点状红外节点设备;
8.(2)记录各安装点的空间坐标[x
i
,y
i
,z
i
]i=1~n,记为矩阵
[0009]
(3)将地点k处可观测到的点状红外节点的id号的集合记为可观测特征组a
k
,全部的可观测特征数组记为{a1~a
k
};
[0010]
(4)接收机通过内嵌的红外摄像头拍摄顶部区域,当接收机获取的实时热成像图像中存在m个点状红外节点设备且m不低于4时,检测m个节点在实时热成像图像的投影坐标
[x
j
,y
j
]j=1~m,记为转到步骤(5);若m小于4,则转到步骤(7);
[0011]
(5)设接收机位置为p=[x0,y0,z0],接收机基于{a1~a
k
}中包含有m个点状红外节点设备的可观测特征组子集{a
q
},遍历与全部潜在可观测到的点状红外节点设备的相对位置矩阵基于pnp映射关系检测是否存在有效解,当存在有效解时得到的[x0,y0,z0]即为接收机的空间定位解;
[0012]
(6)获取有效解后根据pnp映射算法得到的姿态信息对本地惯性器件进行校准,返回步骤(4)进行下一时刻定位;
[0013]
(7)通过惯性推算实现移动过程中定位,或将可观测到的点状红外节点设备作为特征点基于slam算法实现移动过程中定位,返回步骤(4)进行下一时刻定位。
[0014]
一种基于红外基准点的室内与地下空间定位方法,包括以下步骤:
[0015]
(1)在室内或地下空间的顶部区域以非对称方式设置n个安装点,每个安装点安装1个赋形红外节点设备,每个赋形红外节点设备具有多个发光体,观测区域内可观测到不低于1个赋形红外节点设备;
[0016]
(2)记录各安装点的空间坐标[x
i
,y
i
,z
i
]i=1~n,记为矩阵
[0017]
(3)记录赋形红外节点设备的f个发光体采样点在自身坐标系的空间矩阵以及安装在安装点后其自身坐标系和绝对坐标系的转换矩阵d;
[0018]
(4)接收机通过内嵌的红外摄像头拍摄顶部区域,当接收机获取的实时热成像图像中存在1个赋形红外节点设备时,检测赋形红外节点设备在实时热成像图像中所成图形的m个采样点的投影坐标[x
j
,y
j
]j=1~m,记为转到步骤(5);若未拍摄到完整的赋形红外节点设备,则转到步骤(7);
[0019]
(5)设接收机位置为p=[x0,y0,z0],接收机基于各赋形红外节点设备的空间矩阵c和转换矩阵d,遍历与全部潜在可观测到的赋形红外节点设备采样点的相对位置矩阵基于pnp映射关系检测是否存在有效解,当存在有效解时得到的[x0,y0,z0]即为接收机的空间定位解;
[0020]
(6)获取有效解后根据pnp映射算法得到的姿态信息对本地惯性器件进行校准,返回步骤(4)进行下一时刻定位;
[0021]
(7)通过惯性推算实现移动过程中定位,或将可观测到的赋形红外节点设备中多个采样点作为特征点基于slam算法实现移动过程中定位,返回步骤(4)进行下一时刻定位。
[0022]
本发明与现有技术相比所取得的有益效果为:
[0023]
(1)在室内/地下空间中,除存在积水、光滑地面、镜面等物体的环境中,红外信号的衍射、散射、绕射信号非常小,当红外节点和接收机的视距链路被遮蔽物遮挡时,接收机即检测不到信号,因此无需特别考虑抗多径问题。
[0024]
(2)红外基准点仅需要供电发热即可,无需发送信号,基准点之间不需要时间同步,因此红外基准点具有布设简单、成本低廉、使用方便、供电维护周期长的优势,同时在接收机上不存在容量限制。
[0025]
(3)红外成像摄像头价格低廉、市面产品已具备连接手机的通用接口,通过红外成像摄像头可直接获取红外基准点的轮廓,不受环境昼夜和光照影响,无需复杂的视觉处理算法和硬件,可更好适用于现有的手机等接收机平台。
[0026]
(4)相对于现有的红外信标定位方法,通过非对称布设的点状红外节点和非对称形状轮廓加热体的赋形红外节点实现定位,无需在红外设备上安装滤镜等其它配件,安装布设成本低廉。
附图说明
[0027]
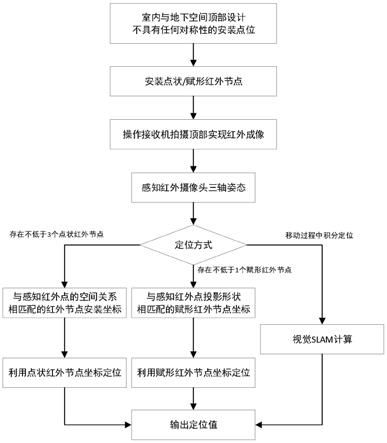
图1是本发明实例中基于红外基准点的室内与地下空间定位方法的流程图。
具体实施方式
[0028]
以下结合附图和具体实施方式对本发明做进一步的说明。
[0029]
一种基于红外基准点的室内与地下空间定位方法,包括以下步骤:
[0030]
(1)设计点状和赋形两种红外节点设备,两种设备均基于自身电池或外部供电以内部加热方式形成红外源,其中点状红外节点设备的内部加热体为点状形态,赋形红外节点设备的内部加热体具有非对称形状轮廓、且不同的赋形红外节点加热体的形状轮廓不同;
[0031]
(2)在室内或地下空间的顶部区域设置多个安装点,每个安装点安装1个红外节点设备,安装点的空间分布需要不具有任何对称特征,并且安装点的疏密程度需要保障观测区域至少观测到3个点状红外节点设备或1个赋形红外节点设备;
[0032]
(3)每个红外节点设备的单位坐标通过通信方式传递给接收机,或者作为已知数据信息存储在接收机内;
[0033]
(4)接收机通过红外摄像头感知红外节点,利用红外成像中红外成像点的空间分布、赋形红外点轮廓和状态变化计算获取自身的定位信息。具体包括:
[0034]
(401)当接收机获取的实时热成像图像内存在不低于3个点状红外节点时,基于多个点状红外节点在红外图像中的投影位置和节点之间的相对位置,以及摄像头自身的三轴姿态信息,计算室内/地下空间中部署的红外节点中哪些节点可得到相同的成像结果,再利用这些节点的坐标信息计算得到接收机的位置信息;
[0035]
(402)当接收机获取的实时热成像图像内存在不低于1个赋形红外节点时,基于赋形红外节点成像形状,从室内/地下空间部署红外节点信息中查找对应的节点及其坐标,结合其在红外图像中的投影位置以及摄像头的三轴姿态信息计算得到接收机的位置信息;
[0036]
(403)在接收机运动过程中,以热成像中的红外节点为特征点,结合摄像头的三轴姿态信息,通过视觉slam里程计计算方法获取定位结果。
[0037]
进一步的,所述接收机是指具有或可连接红外摄像头,能够感知红外基准点红外特征光谱、红外摄像头的三轴姿态信息,并具有定位计算能力的设备,包括专用检测设备、平台搭载的终端设备、通用手机设备等。
[0038]
具体来说,上述方法可分为以下两种情况:
[0039]
一种基于红外基准点的室内与地下空间定位方法,包括以下步骤:
[0040]
(1)设计一种点状红外节点设备,其特征为:基于自身电池或外部供电方式,对设备内部点状形态加热体进行通电加热;
[0041]
(2)在室内或地下空间的顶部区域设置n个安装点,每个安装点安装1个点状红外节点设备,安装点的空间分布需要不具有任何对称特征,并且安装点的疏密程度需要保障观测区域可观测到不低于4个点状红外节点设备;
[0042]
(3)安装点位空间坐标[x
i
,y
i
,z
i
]i=1~n通过通信方式传递给接收机,或者作为已知数据信息存储在接收机内,记为矩阵
[0043]
(4)定义点状红外节点设备的可观测特征组a
k
,其含义是不低于4个点状红外节点的id号的集合,使得在同一地点可观测到特征组a
k
包含的全部红外节点;根据点状红外节点布设情况计算得到n个点状红外节点对应的全部的可观测特征数组{a1~a
k
},通过通信方式传递给接收机,或者作为已知数据信息存储在接收机内;
[0044]
(5)接收机通过内嵌的红外摄像头拍摄顶部区域,当接收机获取的实时热成像图像内存m个点状红外节点且m不低于4时,检测m个节点在实时热成像图像的投影坐标[x
j
,y
j
]j=1~m,记为
[0045]
(6)设接收机位置为p=[x0,y0,z0],接收机基于{a1~a
k
}中包含有m个点状红外节点的可观测特征组子集{a
q
}a
q
包含m个节点id号,遍历与全部潜在可观测到的点状红外节点的相对位置矩阵基于pnp映射关系检测是否存在有效解,当存在有效解时得到的[x0,y0,z0]即为接收机的空间定位解;
[0046]
(7)获取有效解后根据pnp映射算法得到的姿态信息对本地惯性器件进行校准,在不符合(5)中所述观测条件时,通过惯性推算实现移动过程中定位,或将可观测到的点状红外节点作为特征点基于slam算法实现移动过程中定位。
[0047]
一种基于红外基准点的室内与地下空间定位方法,包括以下步骤:
[0048]
(1)设计一种赋形红外节点设备,其特征为:基于自身电池或外部供电方式,对设备内部具有一定形状且不具有任何对称特性的加热体进行通电加热;
[0049]
(2)在室内或地下空间的顶部区域设置n个安装点,每个安装点安装1个赋形红外节点设备,安装点的疏密程度需要保障观测区域可观测到不低于1个赋形红外节点设备;
[0050]
(3)安装点位空间坐标[x
i
,y
i
,z
i
]i=1~n通过通信方式传递给接收机,或者作为已知数据信息存储在接收机内,记为矩阵
[0051]
(4)定义n个赋形红外节点设备的特征组a1~a
n
,其含义是每个赋形红外节点设备发光体f个(f尽可能大)采样点在自身坐标系的空间矩阵以及安装在安装点后其自身坐标系和绝对坐标系的转换矩阵d;通过通信方式传递给接收机,或者作为已知数据信息存储在接收机内;
[0052]
(5)接收机通过内嵌的红外摄像头拍摄顶部区域,当接收机获取的实时热成像图像内存1个赋形红外节点时,检测赋形节点在实时热成像图像中所成图形m个采样点投影坐标[x
j
,y
j
]j=1~m,记为
[0053]
(6)设接收机位置为p=[x0,y0,z0],接收机基于{a1~a
n
},遍历与全部潜在可观测到的赋形红外节点采样点的相对位置矩阵基于pnp映射关系检测是否存在有效解,当存在有效解时得到的[x0,y0,z0]即为接收机的空间定位解;
[0054]
(7)获取有效解后根据pnp映射算法得到的姿态信息对本地惯性器件进行校准,在不符合(5)中所述观测条件时,通过惯性推算实现移动过程中定位,或将可观测到的赋形红外节点中多个采样点作为特征点基于slam算法实现移动过程中定位。
[0055]
以下为一个更具体的例子:
[0056]
图1为一种基于红外基准点的室内与地下空间定位方法的流程图。本方法可面向可预先测绘安装点位置并可预先安装设施的室内、地下等应用场景,实现大容量、具有红外摄像头的接收机可连续获取自身的定位信息。这里以人员利用具有红外摄像头的手机在室内或地下场景实现自身定位为例,详细描述实现步骤:
[0057]
(1)设计点状和赋形两种红外节点设备,两种设备均基于自身电池或外部供电以内部加热方式形成红外源,其中点状红外节点设备的内部加热体为点状形态,赋形红外节点设备的内部加热体具有非对称形状轮廓、且不同的赋形红外节点加热体的形状轮廓不同,如将加热丝围成三角、圆环、方块等形状;
[0058]
(2)在室内或地下空间的顶部区域设置多个安装点,每个安装点安装1个红外节点设备,安装点的空间分布需要不具有任何对称特征,并且安装点的疏密程度需要保障观测区域至少观测到3个点状红外节点设备或1个赋形红外节点设备;
[0059]
(3)每个红外节点设备的单位坐标通过通信方式传递给手机,或者作为已知数据信息存储在手机内;
[0060]
(4)人员操作手机通过红外摄像头朝向顶部区域拍摄感知红外节点,利用红外成像中红外成像点的空间分布、赋形红外点轮廓和状态变化计算获取自身的定位信息。具体包括:
[0061]
(401)当手机通过红外摄像头获取的实时热成像图像内存在不低于3个点状红外节点时,基于多个点状红外节点在红外图像中的投影位置和节点之间的相对位置,以及摄像头自身的三轴姿态信息,计算室内/地下空间中部署的红外节点中哪些节点可得到相同的成像结果,再利用这些节点的坐标信息计算得到手机的位置信息;
[0062]
(402)当手机通过红外摄像头获取的实时热成像图像内存在不低于1个赋形红外节点时,基于赋形红外节点成像形状,从室内/地下空间部署红外节点信息中查找对应的节点及其坐标,结合其在红外图像中的投影位置以及摄像头的三轴姿态信息计算得到手机的位置信息;
[0063]
(403)在人员手持手机向顶部拍摄并连续运动过程中,以热成像中的红外节点为特征点,结合摄像头的三轴姿态信息,通过视觉slam里程计计算方法获取手机的连续定位结果。
[0064]
总之,为了实现室内、地下等空间中的大容量接收机连续可靠定位,本发明设计一种利用静态红外基准点的室内/地下定位方法,通过在室内/地下空间中多个已测绘位置布设可自发热的红外节点(称为红外基准点),接收机通过红外摄像头识别红外节点,并根据红外节点的形状或在热成像图像中的分布来计算接收机自身的位置。
[0065]
本发明无需考虑室内或地下复杂多径环境对信号传播的影响,同时应用方式简易、设备建设和维护成本低、计算复杂度低。本发明可应用于可预先测绘安装点位置并可预先安装设施的室内、地下等定位应用场景,实现大容量、具有红外摄像头的接收机可连续获取自身的定位信息。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。