1.本发明属于结构健康监测领域,具体涉及一种基于分段圆弧拼接算法的构件横向位移监测方法。
背景技术:
2.在地基基础施工过程中,对桩基础、地连墙等竖向构件的施工监测至关重要,常用的水平位移检测手段为测斜管法,首先将测斜管绑扎固定于钢筋网,在浇筑混凝土的过程中测斜管被埋置于构件内部,或通过粘接剂固定于预制管桩内部,测量时将测斜仪探头放入测斜管并读取数据。目前,测斜管法存在诸多问题,其中最困扰工程人员的是堵管问题,在混凝土浇筑以及破除桩头过程中极易造成测斜管的堵塞和损坏,从而导致测斜管失效无法测取数据,此外,测斜仪采用电信号准确度受多种环境因素影响,人工测斜也花费较大的人力和物力。
3.此外,在上部结构的使用过程中,侧向位移变形监测也十分重要,比如悬臂梁的下挠变形、塔吊的垂直度等,一般采用点式位移计或全站仪测量上述位移变形,存在测量盲点,难以得到构件的变形曲线,且外置位移计的支座难以寻找落脚点,全站仪测量虽然精度高但无法实时监测。
4.上述结构健康监测所遇到的问题需要新的监测仪器以及分析方法,可实时监测、分布式监测、性能稳定、可得绝对位移曲线。分布式光纤传感技术具有体积小、抗电磁干扰、时分复用、空分复用、分布式传感、单延米成本低等优点,作为新兴的监测手段具有较大优势,特别是用于分布式应变监测具有明显优势;分段圆弧拼接算法可将分布式应变转换为绝对位移量,计算简单,可以实现实时监测。
技术实现要素:
5.为了解决上述技术问题,本发明公开了一种基于分段圆弧拼接算法的构件横向位移监测方法,该方法利用分布式光纤传感技术,特别是一种长标距光纤应变计,实现构件全长无盲区应变测量,具有分辨率高、可定位、性能稳定的优势;且可利用采集到的应变值得到构件各点的绝对位移值和位移变形曲线。
6.为了达到上述目的,本发明的技术方案如下:
7.一种基于分段圆弧拼接算法的构件横向位移监测方法,其特征在于,包括以下步骤:
8.步骤1、在被监测构件弯曲平面内设置两列相互平行的长标距光纤应变计,两列长标距光纤应变计之间距离记为h;
9.步骤2、采集两列长标距光纤应变计的应变数据,根据相对位置关系,左边的应变数据记为ε
左
,右边的应变数据记为ε
右
;
10.步骤3、通过长标距光纤应变计对被监测构件进行分段监测,每段首尾的两个点为长标距光纤的监测点,利用分段圆弧拼接算法将应变值转换为横向位移值。
11.进一步地,步骤3中所述分段圆弧拼接算法包括如下步骤:
12.步骤3.1、建立相对直角坐标系,以构件固定端的长标距光纤应变计一个端点为坐标原点 o,以构件弯曲平面为xoy平面,其中构件轴向为y轴,x轴与y轴垂直;
13.步骤3.2、根据长标距光纤应变计的标距将被监测构件分成段,分段数量n=l/δl,l为被监测构件沿着长标距光纤应变计方向的高度,δl为长标距光纤应变计的标距;长标距光纤应变计在每段内应变记为ε
i左
和ε
i右
;被监测构件上每段内长标距光纤应变计近似当做圆弧段;
14.步骤3.3、判断所有圆弧段的方向,判别式如下:
[0015][0016]
上式中,m
i
为第i个圆弧段方向判断指标,当m
i
= 1时,圆弧段向右弯曲,当m
i
=-1 时,圆弧段向左弯曲;
[0017]
步骤3.4、根据两列长标距光纤应变之间距离和标距依次求取第i段圆弧的弯曲半径r
i
和圆心角θ
i
;
[0018]
步骤3.5、利用弯曲半径r
i
和圆心角θ
i
计算第i段圆弧的圆心坐标o
i
(x
oi
,y
oi
);
[0019]
步骤3.6、利用弯曲半径r
i
、圆心角θ
i
和圆心坐标o
i
判别第i段圆弧轨迹为顺时针还是逆时针;
[0020]
步骤3.7、根据步骤3.6判断结果求取第i段圆弧起止半径的角度α
i起
、α
i止
;
[0021]
步骤3.8、绘制第i段圆弧,利用步骤3.5求得的o
i
(x
oi
,y
oi
)为圆心,以步骤3.4求得的r
i
为半径,以步骤3.7求得的α
i起
、α
i止
为起止半径角度来绘制圆弧;
[0022]
步骤3.9、重复步骤3.3~3.8即可求得被测构件的侧向位移数据及变形曲线。
[0023]
进一步地,步骤3.4中,弯曲半径r
i
和圆心角θ
i
的计算公式如下:
[0024][0025][0026]
进一步地,步骤3.5中,圆心坐标o
i
(x
oi
,y
oi
)计算公式如下:
[0027]
当i=1,即计算第一段圆弧的圆心坐标时,圆心坐标公式如下:
[0028]
x
oi
=m
i
×
r
i
[0029]
y
oi
=0
[0030]
当i>1,首先判断第i段圆弧的圆心纵坐标y
oi
与第i
‑
1段圆弧的圆心纵坐标y
oi
‑1的大小位置关系:
[0031][0032]
式中,j为位置相邻两端圆弧位置判断指标,当j= 1时,y
oi
>y
oi
‑1,当j=-1时,y
oi
<y
oi
‑1,
[0033]
则依据相似三角形原理,第i段圆弧的圆心纵坐标公式如下:
[0034][0035][0036]
x
ai
为第i个分段的起点横坐标,y
ai
为第i个分段的起点纵坐标。
[0037]
进一步地,步骤3.6中,第i段圆弧轨迹顺逆判断方法如下:
[0038][0039]
式中,k
i
=为判断指标,当k
i
=1时,第i段圆弧轨迹为顺时针,当k
i
=
‑
1时,第i段圆弧轨迹为逆时针。
[0040]
进一步地,步骤3.6中,第i段圆弧起止半径的角度判断方法如下:
[0041]
如果圆弧圆心o
i
与o
i
‑1位于圆弧轨迹的同侧,
[0042]
α
i起
=α
i
‑
1止
[0043]
如果圆弧圆心o
i
与o
i
‑1位于圆弧轨迹的异侧,
[0044]
α
i起
=α
i
‑
1止
π
[0045]
α
i止
=α
i起
‑
k
i
×
θ
i
[0046]
α
i起
为第i段圆弧开始角度;α
i止
第i段圆弧终止角度。
[0047]
进一步地,所述长标距光纤应变计为串接的应变计序列,包括光纤布拉格光栅技术应变计和布里渊光时域反射计/分析仪应变计。
[0048]
进一步地,所述长标距光纤应变计预埋在被监测构件内部或者采用结构胶粘贴于被测结构表面。
[0049]
进一步地,在被监测构件的同一个分段内,两个长标距光纤应变计认为相互平行,因此选取任意一个长标距光纤应变计的形状变化作为变形曲线。
[0050]
本发明首先将两列长标距光纤应变计沿轴向固定于被测构件表面或内部;在标距光纤上设置若干监测点,进行分段监测,采集分段的应变数据;然后将构件各段的应变值及相应初始参数输入分段圆弧拼接算法,得到构件各截面横向变形的位移值及构件变形后的位移变形曲线。其中,分段圆弧拼接算法将构件沿轴向划分为多段,每段的变形近似圆弧化,以各段的左右两个平均应变为输入变量计算圆弧参数,相邻段圆弧具有共同的切点和切线,通过圆弧与圆弧相连的方式延伸即可实现构件横向位移变形的计算。本发明将整根构件分段化,将分段变形圆弧化,并利用长标距光纤应变传感技术解决分布式应变采集问题,提出一种基于分段圆弧拼接算法的构件横向位移监测方法,方法简单、成本低廉、稳定可靠,在地连墙、桩基础、悬臂梁等构件或构筑物的侧向变形监测领域具有较好的应用前景。
[0051]
本发明的有益效果是:
[0052]
采用光纤传感技术,具有光纤体积小、抗电磁干扰、耐腐蚀、灵敏度高、可实现空分复用和编码等优点,对被测构件影响小、安装方便;长标距光纤应变计可解决测斜管易堵塞的问题,并可解放人力实现远程实施监测;分段圆弧拼接算法利用应变值得到位移值,且可得到构件变形前后的曲线,同时避免了外置位移计难以固定的问题。
附图说明
[0053]
图1为长标距光纤应变计结构图;
[0054]
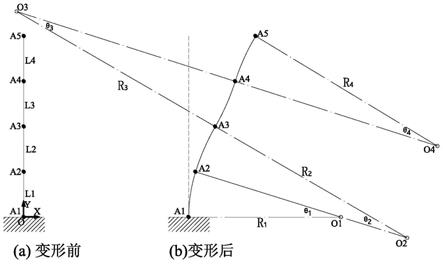
图2为分段圆弧拼接算法参数原理图;
[0055]
图3为matlab编程软件绘制的分析结果图。
具体实施方式
[0056]
结合附图,通过具体实施方式对本发明的技术方案进一步说明。
[0057]
一种基于分段圆弧拼接算法的构件横向位移监测方法,采用长标距光纤应变计采集构件各段的应变值,利用分段圆弧拼接算法将应变值转换为位移值,并得到构件变形前后的位移曲线。长标距光纤应变计监测原理包括两种,一是光纤布拉格光栅(fbg)技术,二是布里渊光时域反射计/分析仪(botdr/a)技术,两种传感技术均可满足监测需求,两种传感技术的应变计算公式分别如下:
[0058]
δλ=α
ε
ε
[0059]
δυ=c
ε
ε
[0060]
式中,ε为待求应变,α
ε
、c
ε
为已标定的应变灵敏度系数,δλ为采集到fbg中心波长变化量,δυ为采集到的布里渊频移变化量。
[0061]
如图1,所述长标距光纤应变计为串接的应变计串列,且在同一标距内有两个相互平行的光纤应变传感器,两个应变段的平行间距为h,可同时测得弯曲平面的两个应变值ε
左
、ε
右
。
[0062]
如图1,所述长标距光纤应变计安装方式包括两种,一是直接绑扎于被测结构的纵向钢筋,混凝土浇筑后埋置于构件内部;二是采用结构胶粘贴于被测结构表面;两种安装方式均需确保应变计串列位于被测构件的弯曲平面内。
[0063]
在获得应变数据后,结合图3说明所述分段圆弧拼接算法的分析步骤:
[0064]
st.1:采用上述应变计采集应变值并导入算法流程;
[0065]
st.2:如图2,建立相对直角坐标系,以构件固定端点为坐标原点o,以构件弯曲平面为 xoy平面,其中构件轴向为y轴,x轴与y轴垂直;
[0066]
st.3:依据应变计标距δl将被测构件分段化,每段首尾的两个点为长标距光纤的监测点,分段数量计算公式如下:
[0067]
n=l/δl
[0068]
长标距光纤应变计在每段内应变(也即是长标距光纤上两个监测点之间所监测到的应变) 记为ε
i左
和ε
i右
;被监测构件上每段内长标距光纤应变计近似当做圆弧段;
[0069]
st4:判别第i段圆弧的弯曲方向,判别式如下:
[0070][0071]
式中,当m
i
= 1时,圆弧段向x正方向弯曲,当m
i
=-1时,圆弧段向x负方向弯曲;
[0072]
st.5:如图2,依次求取第i段圆弧的弯曲半径r
i
和圆心角θ
i
:
[0073]
[0074][0075]
st.6:求取第i段圆弧的圆心坐标o
i
(x
oi
,y
oi
):
[0076]
①
当i=1,即计算第一段圆弧的圆心坐标时,圆心坐标公式如下:
[0077]
x
oi
=m
i
×
r
i
[0078]
y
oi
=0
[0079]
②
当i>1,首先判断第i段圆弧的圆心纵坐标y
oi
与第i
‑
1段圆弧的圆心纵坐标y
oi
‑1的大小位置关系:
[0080][0081]
式中,当j= 1时,y
oi
>y
oi
‑1,当j=-1时,y
oi
<y
oi
‑1,
[0082]
则依据相似三角形原理,第i段圆弧的圆心纵坐标公式如下:
[0083][0084][0085]
st.7:判别第i段圆弧轨迹为顺时针还是逆时针:
[0086][0087]
式中,当k
i
=1时,第i段圆弧轨迹为顺时针,当k
i
=
‑
1时,第i段圆弧轨迹为逆时针;
[0088]
st.8:求取第i段圆弧起止半径的角度α
i起
、α
i止
:
[0089]
如果圆弧圆心o
i
与o
i
‑1位于圆弧轨迹的同侧,
[0090]
α
i起
=α
i
‑
1止
[0091]
如果圆弧圆心o
i
与o
i
‑1位于圆弧轨迹的异侧,
[0092]
α
i起
=α
i
‑
1止
π
[0093]
α
i止
=α
i起
‑
k
i
×
θ
i
[0094]
st.9:绘制第i段圆弧,利用步骤6求得的o
i
(x
oi
,y
oi
)为圆心,以步骤5求得的r
i
为半径,以步骤8求得的α
i起
、α
i止
为起止半径角度来绘制圆弧;
[0095]
重复步骤4~9即可求得被测构件的侧向位移数据及如图2所示的变形曲线。
[0096]
为便于说明本实施例的应用效果,如图3,采用matlab软件实现以上算法并绘制了某竖向构件的位移监测结果图,图中给出了预警位移值,可以实现位移超限预警。
[0097]
本技术中的一种基于分段圆弧拼接算法的构件横向位移监测方法具有如下技术效果:
[0098]
该监测方法解决了测斜管容易堵塞以及电化学仪器测量值干扰因素多的问题。
[0099]
该监测方法可实现功能拓展,既可得到构件的应变分布,也可得到构件的位移变形,此外,还可以监测构件横向裂缝开展及分布。
[0100]
该监测方法可以实现远程实施在线监测,解决了人工采用测斜仪或全站仪必须现场测量的问题。
[0101]
该监测方法具有光纤的体积小、抗电磁干扰、耐腐蚀、灵敏度高、可实现空分复用和编码等优点。
[0102]
以上所述仅是本发明的优选实施方式,应当指出,对于本领域的普通技术人员来说,在不脱离本发明创造构思的前提下,还可以做出若干变形和改进,这些都属于本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。