1.本发明涉及污水处理技术领域,具体而言,涉及一种基于浮游生物的水污染预警系统。
背景技术:
2.目前,随着社会经济的高速发展,水体环境面临污染加剧的困境,现有的水污染处理中包括利用生物反应来评价环境的变化,其目的是希望在有害物质还未达到受纳系统之前,在工厂或现场就以最快的速度把它检测出来,以免破坏受纳系统的生态平衡,或是能侦察出潜在的毒性,但是普通的生物检测装置,通过生物的行为进行判断,由于生物的自然活动,容易造成误判,而如何根据水体内的浮游生物的含量进行水污染预警,成为急需解决的问题。
技术实现要素:
3.鉴于此,本发明提出了一种一种基于浮游生物的水污染预警系统,旨在解决根据水体内的浮游生物的变化,从而进行水污染预警的问题。
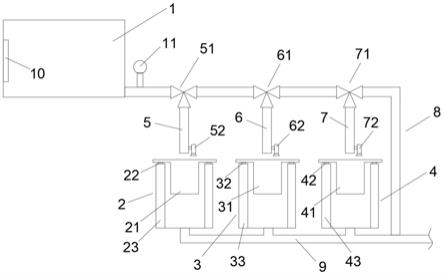
4.一个方面,本发明提出了一种基于浮游生物的水污染预警系统,包括:控制单元、储水箱、第一过滤单元、第二过滤单元和第三过滤单元,所述储水箱用于储存水源,所述储水箱内设置有液位传感器,所述储水箱下部的出水端设置有输送管道,所述输送管道上设置流量计,所述输送管道串联有第一电磁阀、第二电磁阀和第三电磁阀,所述第一电磁阀与第一管道连接,以向所述第一过滤单元内输送水源,所述第二电磁阀与第二管道连接,以向所述第二过滤单元内输送水源,所述第三电磁阀与第三管道连接,以向所述第三过滤单元内输送水源;
5.所述第一过滤单元包括第一滤网、第一称重单元和第一圆筒,所述第一称重单元设置在所述第一圆筒的上端,所述第一滤网插设在所述第一圆筒的内部,且所述第一滤网的边缘搭设在所述第一称重单元上,通过所述第一称重单元对所述第一滤网进行称重,所述第一滤网位于所述第一管道的正下方,所述第一管道上设置有第一图像采集单元,所述第一图像采集单元用于采集所述第一滤网的图像信息;
6.所述第二过滤单元包括第二滤网、第二称重单元和第二圆筒,所述第二称重单元设置在所述第二圆筒的上端,所述第二滤网插设在所述第二圆筒的内部,且所述第二滤网的边缘搭设在所述第二称重单元上,通过所述第二称重单元对所述第二滤网进行称重,所述第二滤网位于所述第二管道的正下方,所述第二管道上设置有第二图像采集单元,所述第二图像采集单元用于采集所述第二滤网的图像信息;
7.所述第三过滤单元包括第三滤网、第三称重单元和第三圆筒,所述第三称重单元设置在所述第三圆筒的上端,所述第三滤网插设在所述第三圆筒的内部,且所述第三滤网的边缘搭设在所述第三称重单元上,通过所述第三称重单元对所述第三滤网进行称重,所述第三滤网位于所述第三管道的正下方,所述第三管道上设置有第三图像采集单元,所述
第三图像采集单元用于采集所述第三滤网的图像信息;所述第一滤网的目数小于所述第二滤网的目数,所述第二滤网的目数小于所述第三滤网的目数;
8.所述控制单元包括处理模块、控制模块、采集模块和报警模块,所述采集模块分别与所述液位传感器、流量计、第一图像采集单元、第二图像采集单元、第三图像采集单元、第一称重单元、第二称重单元和第三称重单元电连接,以进行数据采集,所述控制模块与所述第一电磁阀、第二电磁阀和第三电磁阀电连接,以对其进行控制,所述处理模块用于获取所述采集模块采集的数据,根据获取的数据判断水源是否被污染,并输出报警指令,所述报警模块用于执行所述报警指令。
9.进一步地,所述处理模块还用于从所述采集模块采集的数据中,确定所述储水箱内的实时液位高度
△
l,并根据所述实时液位高度
△
l确定向所述第一过滤单元内注入的水量,记为第一水源注入量l1,在向第一过滤单元内注入第一水源注入量l1后,获取所述第一滤网上的浮游生物的第一质量
△
w1,并通过所述第一图像采集单元采集所述第一滤网上的浮游生物的图像信息,从所述图像信息中获取第一平均灰度值h1;
10.所述处理模块还用于设定标准浮游生物质量w0和标准平均灰度值h0,所述处理模块还用于根据所述第一质量
△
w1和第一平均灰度值h1判断水源是否被污染:
11.当
△
w1≤w0、h1≤h0时,则判断水源未被污染;
12.当
△
w1>w0、h1>h0时,则判断水源被污染,通过所述报警模块进行报警;
13.当
△
w1≤w0、h1>h0时,或者当
△
w1>w0、h1≤h0时,则判断水源可能被污染。
14.进一步地,所述处理模块还用于根据所述实时液位高度
△
l确定向所述第二过滤单元内注入的水量,记为第二水源注入量l2,在向第二过滤单元内注入第二水源注入量l2后,获取所述第二滤网上的浮游生物的第二质量
△
w2,并通过所述第二图像采集单元采集所述第二滤网上的浮游生物的图像信息,从所述图像信息中获取第二平均灰度值h2;所述处理模块还用于设定标准浮游生物质量差值a0;
15.所述处理模块还用于在当
△
w1≤w0、h1>h0或者当
△
w1>w0、h1≤h0,并判断水源可能被污染时,根据所述第一质量
△
w1和第二质量
△
w2之间的差值和第二平均灰度值h2再次判断水源是否被污染:
16.当|
△
w2
‑△
w1|≤a0、h2≤h0时,则判断水源未被污染;
17.当|
△
w2
‑△
w1|>a0、h2>h0时,则判断水源被污染,通过所述报警模块进行报警;
18.当|
△
w2
‑△
w1|≤a0、h2>h0时,或者当|
△
w2
‑△
w1|>a0、h2≤h0时,则判断水源可能被污染。
19.进一步地,所述处理模块还用于根据所述实时液位高度
△
l确定向所述第三过滤单元内注入的水量,记为第三水源注入量l3,在向第三过滤单元内注入第三水源注入量l3后,获取所述第三滤网上的浮游生物的第三质量
△
w3,并通过所述第三图像采集单元采集所述第三滤网上的浮游生物的图像信息,从所述图像信息中获取第三平均灰度值h3;所述处理模块还用于设定标准质量与灰度值比值b0;
20.所述处理模块还用于根据所述第三水源注入量l3和第三质量
△
w3之间的比值与所述标准质量与灰度值比值b0再次判断水源是否被污染:
21.当l3/
△
w3>b0时,则判断水源被污染,通过所述报警模块进行报警;
22.当l3/
△
w3≤b0时,则判断水源未被污染。
23.进一步地,所述处理模块还用于在设定所述标准质量与灰度值比值b0时,按下式确定:b0={(l1/
△
w1 l2/
△
w2 l1/
△
w2 l2/
△
w1 )/4 [(l1 l2)/(
△
w1
△
w2) (|l1
‑
l2|)/(|
△
w1
‑△
w2|)]/2}/2。
[0024]
进一步地,所述处理模块还用于设定第一预设液位高度l1、第二预设液位高度l2、第三预设液位高度l3和第四预设液位高度l4,且l1<l2<l3<l4;所述处理模块还用于设定第一预设水源注入量l01、第二预设水源注入量l02、第三预设水源注入量l03和第四预设水源注入量l04,且l01<l02<l03<l04;
[0025]
所述处理模块还用于根据所述储水箱内的实时液位高度
△
l与各所述预设液位高度之间的关系确定向所述第一过滤单元、第二过滤单元和第三过滤单元内注水时的注水量:
[0026]
当
△
l≤l1时,将所述第一预设水源注入量l01作为所述第一水源注入量l1、第二水源注入量l2和第三水源注入量l3;
[0027]
当l1≤
△
l<l2时,将所述第二预设水源注入量l02作为所述第一水源注入量l1、第二水源注入量l2和第三水源注入量l3;
[0028]
当l2≤
△
l<l3时,将所述第三预设水源注入量l03作为所述第一水源注入量l1、第二水源注入量l2和第三水源注入量l3;
[0029]
当l3≤
△
l<l4时,将所述第四预设水源注入量l04作为所述第一水源注入量l1、第二水源注入量l2和第三水源注入量l3。
[0030]
进一步地,所述处理模块还用于在获取到所述第一滤网、第二滤网或第三滤网的图像信后,从所述图像信息中截取一图像帧,对该图像帧进行灰度处理,获取该图像帧每一像素块的灰度值,在确定所有像素块的灰度值后,计算所有像素块的平均灰度值ha;
[0031]
所述处理模块还用于设定第一预设注水量m1、第二预设注水量m2、第三预设注水量m3和第四预设注水量m4,且m1<m2<m3<m4;所述处理模块内还设定有第一预设补偿系数c1、第二预设补偿系数c2、第三预设补偿系数c3和第四预设补偿系数c4,且1<c1<c2<c3<c4<1.2;
[0032]
所述处理模块还用于在选定所述第i预设水源注入量l0i作为所述第一水源注入量l1、第二水源注入量l2和第三水源注入量l3时,根据所述第i预设水源注入量l0i与各预预设注水量之间的关系选定补偿系数,以对所述像素块的平均灰度值ha进行补偿,并将补偿后的所述像素块的平均灰度值作为所述第一平均灰度值h1、第二平均灰度值h2或第三平均灰度值h3:
[0033]
当l0i<m1时,选定所述第一预设补偿系数c1对所述像素块的平均灰度值ha进行补偿,并将补偿后的平均灰度值ha*c1作为所述第一平均灰度值h1、第二平均灰度值h2或第三平均灰度值h3;
[0034]
当m1<l0i≤m2时,选定所述第二预设补偿系数c2对所述像素块的平均灰度值ha进行补偿,并将补偿后的平均灰度值ha*c2作为所述第一平均灰度值h1、第二平均灰度值h2或第三平均灰度值h3;
[0035]
当m2<l0i≤m3时,选定所述第三预设补偿系数c3对所述像素块的平均灰度值ha进行补偿,并将补偿后的平均灰度值ha*c3作为所述第一平均灰度值h1、第二平均灰度值h2或第三平均灰度值h3;
[0036]
当m3<l0i≤m4时,选定所述第四预设补偿系数c4对所述像素块的平均灰度值ha进行补偿,并将补偿后的平均灰度值ha*c4作为所述第一平均灰度值h1、第二平均灰度值h2或第三平均灰度值h3。
[0037]
进一步地,所述处理模块还用于获取所述第一滤网、第二滤网或第三滤网未进行水源过滤时的初始平均灰度值hb;
[0038]
所述处理模块还用于在获取到所述第一滤网、第二滤网或第三滤网的图像信后,从所述图像信息中截取一图像帧,对该图像帧进行灰度处理,获取该图像帧每一像素块的灰度值后,将所有像素块中灰度值与所述初始平均灰度值hb相等的像素块剔除,根据余下的像素块的灰度值计算所述平均灰度值ha。
[0039]
进一步地,所述第一圆筒、第二圆筒和第三圆筒的下端设置有出水口,且所述出水口与排水管道相连通,以通过所述排水管道将所述第一圆筒、第二圆筒和第三圆筒内的水源排出。
[0040]
进一步地,所述第一滤网、第二滤网和第三滤网均为一t型构件,所述t型构件的边缘搭设在称重单元上。
[0041]
与现有技术相比,本发明的有益效果在于,通过设置控制单元、储水箱、第一过滤单元、第二过滤单元和第三过滤单元,将采集的水源输送至储水箱内进行储存,并通过第一过滤单元、第二过滤单元和第三过滤单元分别对储水箱内水源进行过滤,并通过称重单元对过滤后的浮游生物的重量进行称量,同时,通过图像采集单元对过滤后的浮游生物进行图像采集,从而根据采集的数据判断水源是否被污染,并输出报警指令以进行水污染预警,能够有效地根据水源内的浮游生物的变化及时地对水源污染进行预警。
附图说明
[0042]
通过阅读下文优选实施方式的详细描述,各种其他的优点和益处对于本领域普通技术人员将变得清楚明了。附图仅用于示出优选实施方式的目的,而并不认为是对本发明的限制。而且在整个附图中,用相同的参考符号表示相同的部件。在附图中:
[0043]
图1为本发明实施例提供的基于浮游生物的水污染预警系统的结构示意图;
[0044]
图2为本发明实施例提供的基于浮游生物的水污染预警系统的功能框图。
具体实施方式
[0045]
下面将参照附图更详细地描述本公开的示例性实施例。虽然附图中显示了本公开的示例性实施例,然而应当理解,可以以各种形式实现本公开而不应被这里阐述的实施例所限制。相反,提供这些实施例是为了能够更透彻地理解本公开,并且能够将本公开的范围完整的传达给本领域的技术人员。需要说明的是,在不冲突的情况下,本发明中的实施例及实施例中的特征可以相互组合。下面将参考附图并结合实施例来详细说明本发明。
[0046]
参阅图1和2所示,本实施例提供了一种基于浮游生物的水污染预警系统,包括控制单元、储水箱1、第一过滤单元2、第二过滤单元2和第三过滤单元3,所述储水箱1为一箱体结构,且用于储存水源,可通过水泵将待检测水域的水体抽取至储水箱1内进行储存,以便于后续使用。
[0047]
具体而言,所述储水箱1内设置有液位传感器10,已检测储水箱1内的水位高度信
息或液位高度信息,液位传感器10与控制单元电连接,以将采集的水位高度信息或液位高度信息传输至控制单元内进行处理。
[0048]
具体而言,所述储水箱1下部的出水端设置有输送管道8,所述输送管道8上设置流量计11,流量计11靠近储水箱1下部的出水端设置。所述输送管道8串联有第一电磁阀51、第二电磁阀61和第三电磁阀71,所述第一电磁阀51与第一管道5连接,通过第一管道5向所述第一过滤单元2内输送水源,所述第二电磁阀61与第二管道6连接,通过第二管道6向所述第二过滤单元2内输送水源,所述第三电磁阀71与第三管道7连接,通过第三管道7向所述第三过滤单元3内输送水源。第一电磁阀51、第二电磁阀61和第三电磁阀71优选为三通电磁阀,其分别与控制单元电连接,通过控制单元对开关状态进行控制。
[0049]
具体而言,所述第一过滤单元2包括第一滤网21、第一称重单元22和第一圆筒23,所述第一称重单元22设置在所述第一圆筒23的上端,所述第一滤网21插设在所述第一圆筒23的内部,且所述第一滤网21的边缘搭设在所述第一称重单元22上,通过所述第一称重单元22对所述第一滤网21进行称重,所述第一滤网21位于所述第一管道5的正下方,所述第一管道5上设置有第一图像采集单元52,所述第一图像采集单元52用于采集所述第一滤网21的图像信息。第一滤网21为一t型构件,t型构件的中部为凹陷结构,以容纳过滤后的浮游生物,t型构件的边缘搭设在第一称重单元22上,且t型构件不与第一圆筒23内侧壁接触,通过第一称重单元22对第一滤网21上过滤后的浮游生物记性称重。同时,通过第一图像采集单元52采集第一滤网21上过滤后的浮游生物的图像信息。
[0050]
所述第二过滤单元2包括第二滤网31、第二称重单元32和第二圆筒33,所述第二称重单元32设置在所述第二圆筒33的上端,所述第二滤网31插设在所述第二圆筒33的内部,且所述第二滤网31的边缘搭设在所述第二称重单元32上,通过所述第二称重单元32对所述第二滤网31进行称重,所述第二滤网31位于所述第二管道6的正下方,所述第二管道6上设置有第二图像采集单元62,所述第二图像采集单元62用于采集所述第二滤网31的图像信息。第二滤网31为一t型构件,t型构件的中部为凹陷结构,以容纳过滤后的浮游生物,t型构件的边缘搭设在第二称重单元32上,且t型构件不与第二圆筒33内侧壁接触,通过第二称重单元32对第二滤网31上过滤后的浮游生物记性称重。同时,通过第二图像采集单元62采集第二滤网31上过滤后的浮游生物的图像信息。
[0051]
所述第三过滤单元3包括第三滤网41、第三称重单元42和第三圆筒43,所述第三称重单元42设置在所述第三圆筒43的上端,所述第三滤网41插设在所述第三圆筒43的内部,且所述第三滤网41的边缘搭设在所述第三称重单元42上,通过所述第三称重单元42对所述第三滤网41进行称重,所述第三滤网41位于所述第三管道7的正下方,所述第三管道7上设置有第三图像采集单元72,所述第三图像采集单元72用于采集所述第三滤网41的图像信息;所述第一滤网21的目数小于所述第二滤网31的目数,所述第二滤网31的目数小于所述第三滤网41的目数。第三滤网41为一t型构件,t型构件的中部为凹陷结构,以容纳过滤后的浮游生物,t型构件的边缘搭设在第三称重单元42上,且t型构件不与第三圆筒43内侧壁接触,通过第三称重单元42对第三滤网41上过滤后的浮游生物记性称重。同时,通过第三图像采集单元72采集第三滤网41上过滤后的浮游生物的图像信息。
[0052]
具体而言,所述第一圆筒23、第二圆筒33和第三圆筒43的下端设置有出水口,且所述出水口与排水管道9相连通,以通过所述排水管道9将所述第一圆筒23、第二圆筒33和第
三圆筒43内的水源排出。
[0053]
具体而言,第一称重单元22、第一图像采集单元52、第二称重单元32、第二图像采集单元62、第三称重单元42和第三图像采集单元72分别与控制单元电连接,以将其采集的重量数据和图像数据传输至控制单元进行处理。
[0054]
继续参阅图2所示,所述控制单元包括处理模块、控制模块、采集模块和报警模块,所述采集模块分别与所述液位传感器10、流量计11、第一图像采集单元52、第二图像采集单元62、第三图像采集单元72、第一称重单元22、第二称重单元32和第三称重单元42电连接,以进行数据采集,所述控制模块与所述第一电磁阀51、第二电磁阀61和第三电磁阀71电连接,以对其进行控制,所述处理模块用于获取所述采集模块采集的数据,根据获取的数据判断水源是否被污染,并输出报警指令,所述报警模块用于执行所述报警指令。
[0055]
具体而言,通过设置的流量计11能够检测水流数据,通过水流数据可以得出水源的输送量。
[0056]
具体而言,报警模块还与服务器或者监控终端连接,以将报警指令传输至服务器或者监控终端,以提醒工作人员水源污染情况。
[0057]
具体而言,在具体实施时,将待检测水源抽取至储水箱1内,并将储水箱1内的水源依次输送至第一过滤单元2、第二过滤单元2和第三过滤单元3进行过滤,从而根据第一过滤单元2、第二过滤单元2和第三过滤单元3过滤后的浮游生物的情况判断水体是否被污染。
[0058]
可以看出,本实施例通过设置控制单元、储水箱1、第一过滤单元2、第二过滤单元2和第三过滤单元3,将采集的水源输送至储水箱1内进行储存,并通过第一过滤单元2、第二过滤单元2和第三过滤单元3分别对储水箱1内水源进行过滤,并通过称重单元对过滤后的浮游生物的重量进行称量,同时,通过图像采集单元对过滤后的浮游生物进行图像采集,从而根据采集的数据判断水源是否被污染,并输出报警指令以进行水污染预警,能够有效地根据水源内的浮游生物的变化及时地对水源污染进行预警。
[0059]
具体而言,所述处理模块还用于从所述采集模块采集的数据中,确定所述储水箱内的实时液位高度
△
l,并根据所述实时液位高度
△
l确定向所述第一过滤单元内注入的水量,记为第一水源注入量l1,在向第一过滤单元内注入第一水源注入量l1后,获取所述第一滤网上的浮游生物的第一质量
△
w1,并通过所述第一图像采集单元采集所述第一滤网上的浮游生物的图像信息,从所述图像信息中获取第一平均灰度值h1;
[0060]
所述处理模块还用于设定标准浮游生物质量w0和标准平均灰度值h0,所述处理模块还用于根据所述第一质量
△
w1和第一平均灰度值h1判断水源是否被污染:
[0061]
当
△
w1≤w0、h1≤h0时,则判断水源未被污染;
[0062]
当
△
w1>w0、h1>h0时,则判断水源被污染,通过所述报警模块进行报警;
[0063]
当
△
w1≤w0、h1>h0时,或者当
△
w1>w0、h1≤h0时,则判断水源可能被污染。
[0064]
具体而言,所述处理模块还用于根据所述实时液位高度
△
l确定向所述第二过滤单元内注入的水量,记为第二水源注入量l2,在向第二过滤单元内注入第二水源注入量l2后,获取所述第二滤网上的浮游生物的第二质量
△
w2,并通过所述第二图像采集单元采集所述第二滤网上的浮游生物的图像信息,从所述图像信息中获取第二平均灰度值h2;所述处理模块还用于设定标准浮游生物质量差值a0;
[0065]
所述处理模块还用于在当
△
w1≤w0、h1>h0或者当
△
w1>w0、h1≤h0,并判断水源
可能被污染时,根据所述第一质量
△
w1和第二质量
△
w2之间的差值和第二平均灰度值h2再次判断水源是否被污染:
[0066]
当|
△
w2
‑△
w1|≤a0、h2≤h0时,则判断水源未被污染;
[0067]
当|
△
w2
‑△
w1|>a0、h2>h0时,则判断水源被污染,通过所述报警模块进行报警;
[0068]
当|
△
w2
‑△
w1|≤a0、h2>h0时,或者当|
△
w2
‑△
w1|>a0、h2≤h0时,则判断水源可能被污染。
[0069]
具体而言,所述处理模块还用于根据所述实时液位高度
△
l确定向所述第三过滤单元内注入的水量,记为第三水源注入量l3,在向第三过滤单元内注入第三水源注入量l3后,获取所述第三滤网上的浮游生物的第三质量
△
w3,并通过所述第三图像采集单元采集所述第三滤网上的浮游生物的图像信息,从所述图像信息中获取第三平均灰度值h3;所述处理模块还用于设定标准质量与灰度值比值b0;
[0070]
所述处理模块还用于根据所述第三水源注入量l3和第三质量
△
w3之间的比值与所述标准质量与灰度值比值b0再次判断水源是否被污染:
[0071]
当l3/
△
w3>b0时,则判断水源被污染,通过所述报警模块进行报警;
[0072]
当l3/
△
w3≤b0时,则判断水源未被污染。
[0073]
可以看出,通过第一过滤单元、第二过滤单元和第三过滤单元分别对水源进行过滤后,由于,第一过滤单元、第二过滤单元和第三过滤单元的滤网目数不同,可过滤出不同大小的浮游生物。根据过滤的不同大小的浮游生物,对水源污染情况进行判断,从而能够准确的根据浮游生物的变化,及时地获知水体的污染情况,从而极大地提高了结果的准确性,同时还能够极大地提高施工效率。
[0074]
具体而言,所述处理模块还用于在设定所述标准质量与灰度值比值b0时,按下式确定:b0={(l1/
△
w1 l2/
△
w2 l1/
△
w2 l2/
△
w1 )/4 [(l1 l2)/(
△
w1
△
w2) (|l1
‑
l2|)/(|
△
w1
‑△
w2|)]/2}/2。具体的,通过根据不同的水源注入量和浮游生物的第三质量进行标准比对值的确定,能够极大地提高了数据的准确性,以保证判断结果的准确性。
[0075]
具体而言,所述处理模块还用于设定第一预设液位高度l1、第二预设液位高度l2、第三预设液位高度l3和第四预设液位高度l4,且l1<l2<l3<l4;所述处理模块还用于设定第一预设水源注入量l01、第二预设水源注入量l02、第三预设水源注入量l03和第四预设水源注入量l04,且l01<l02<l03<l04;
[0076]
所述处理模块还用于根据所述储水箱内的实时液位高度
△
l与各所述预设液位高度之间的关系确定向所述第一过滤单元、第二过滤单元和第三过滤单元内注水时的注水量:
[0077]
当
△
l≤l1时,将所述第一预设水源注入量l01作为所述第一水源注入量l1、第二水源注入量l2和第三水源注入量l3;
[0078]
当l1≤
△
l<l2时,将所述第二预设水源注入量l02作为所述第一水源注入量l1、第二水源注入量l2和第三水源注入量l3;
[0079]
当l2≤
△
l<l3时,将所述第三预设水源注入量l03作为所述第一水源注入量l1、第二水源注入量l2和第三水源注入量l3;
[0080]
当l3≤
△
l<l4时,将所述第四预设水源注入量l04作为所述第一水源注入量l1、第二水源注入量l2和第三水源注入量l3。
[0081]
具体而言,所述处理模块还用于在获取到所述第一滤网、第二滤网或第三滤网的图像信后,从所述图像信息中截取一图像帧,对该图像帧进行灰度处理,获取该图像帧每一像素块的灰度值,在确定所有像素块的灰度值后,计算所有像素块的平均灰度值ha;
[0082]
所述处理模块还用于设定第一预设注水量m1、第二预设注水量m2、第三预设注水量m3和第四预设注水量m4,且m1<m2<m3<m4;所述处理模块内还设定有第一预设补偿系数c1、第二预设补偿系数c2、第三预设补偿系数c3和第四预设补偿系数c4,且1<c1<c2<c3<c4<1.2;
[0083]
所述处理模块还用于在选定所述第i预设水源注入量l0i作为所述第一水源注入量l1、第二水源注入量l2和第三水源注入量l3时,根据所述第i预设水源注入量l0i与各预预设注水量之间的关系选定补偿系数,以对所述像素块的平均灰度值ha进行补偿,并将补偿后的所述像素块的平均灰度值作为所述第一平均灰度值h1、第二平均灰度值h2或第三平均灰度值h3:
[0084]
当l0i<m1时,选定所述第一预设补偿系数c1对所述像素块的平均灰度值ha进行补偿,并将补偿后的平均灰度值ha*c1作为所述第一平均灰度值h1、第二平均灰度值h2或第三平均灰度值h3;
[0085]
当m1<l0i≤m2时,选定所述第二预设补偿系数c2对所述像素块的平均灰度值ha进行补偿,并将补偿后的平均灰度值ha*c2作为所述第一平均灰度值h1、第二平均灰度值h2或第三平均灰度值h3;
[0086]
当m2<l0i≤m3时,选定所述第三预设补偿系数c3对所述像素块的平均灰度值ha进行补偿,并将补偿后的平均灰度值ha*c3作为所述第一平均灰度值h1、第二平均灰度值h2或第三平均灰度值h3;
[0087]
当m3<l0i≤m4时,选定所述第四预设补偿系数c4对所述像素块的平均灰度值ha进行补偿,并将补偿后的平均灰度值ha*c4作为所述第一平均灰度值h1、第二平均灰度值h2或第三平均灰度值h3。
[0088]
具体而言,通过所述处理模块在选定所述第i预设水源注入量l0i作为所述第一水源注入量l1、第二水源注入量l2和第三水源注入量l3时,根据所述第i预设水源注入量l0i与各预预设注水量之间的关系选定补偿系数,以对所述像素块的平均灰度值ha进行补偿,并将补偿后的所述像素块的平均灰度值作为所述第一平均灰度值h1、第二平均灰度值h2或第三平均灰度值h3,从而能够极大地提高获取的平均灰度值的准确性。
[0089]
具体而言,所述处理模块还用于获取所述第一滤网、第二滤网或第三滤网未进行水源过滤时的初始平均灰度值hb;
[0090]
所述处理模块还用于在获取到所述第一滤网、第二滤网或第三滤网的图像信后,从所述图像信息中截取一图像帧,对该图像帧进行灰度处理,获取该图像帧每一像素块的灰度值后,将所有像素块中灰度值与所述初始平均灰度值hb相等的像素块剔除,根据余下的像素块的灰度值计算所述平均灰度值ha。
[0091]
具体而言,上述控制单元可以为一工控机、控制器或者计算机等具备数据处理以及控制能力的数据处理设备。
[0092]
本领域内的技术人员应明白,本技术的实施例可提供为方法、系统、或计算机程序产品。因此,本技术可采用完全硬件实施例、完全软件实施例、或结合软件和硬件方面的实
施例的形式。而且,本技术可采用在一个或多个其中包含有计算机可用程序代码的计算机可用存储介质(包括但不限于磁盘存储器、cd
‑
rom、光学存储器等)上实施的计算机程序产品的形式。
[0093]
本技术是参照根据本技术实施例的方法、设备(系统)、和计算机程序产品的流程图和/或方框图来描述的。应理解可由计算机程序指令实现流程图和/或方框图中的每一流程和/或方框、以及流程图和/或方框图中的流程和/或方框的结合。可提供这些计算机程序指令到通用计算机、专用计算机、嵌入式处理机或其他可编程数据处理设备的处理器以产生一个机器,使得通过计算机或其他可编程数据处理设备的处理器执行的指令产生用于实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能的装置。
[0094]
这些计算机程序指令也可存储在能引导计算机或其他可编程数据处理设备以特定方式工作的计算机可读存储器中,使得存储在该计算机可读存储器中的指令产生包括指令装置的制造品,该指令装置实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能。
[0095]
这些计算机程序指令也可装载到计算机或其他可编程数据处理设备上,使得在计算机或其他可编程设备上执行一系列操作步骤以产生计算机实现的处理,从而在计算机或其他可编程设备上执行的指令提供用于实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能的步骤。
[0096]
最后应当说明的是:以上实施例仅用以说明本发明的技术方案而非对其限制,尽管参照上述实施例对本发明进行了详细的说明,所属领域的普通技术人员应当理解:依然可以对本发明的具体实施方式进行修改或者等同替换,而未脱离本发明精神和范围的任何修改或者等同替换,其均应涵盖在本发明的权利要求保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。