技术特征:
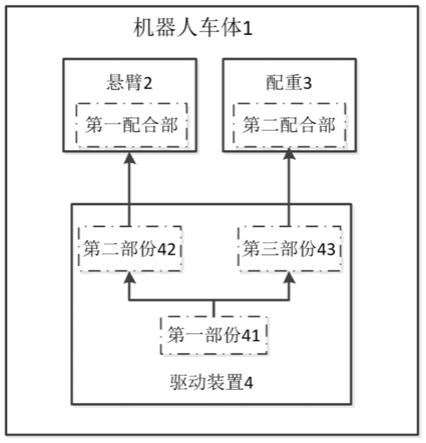
1.一种机器人,其中,所述机器人包括主体,在主体上设置有可伸展收缩的悬臂、配重以及驱动装置,所述驱动装置同时驱动所述悬臂和配重的动作,使得在悬臂伸展或收缩的同时,配重相对于机器人的重心的距离变大或变小,以平衡所述悬臂的变化带来的重心不稳。2.根据权利要求1所述的机器人,其特征在于:所述配重相对于机器人的重心的距离变大或变小通过配重的移动或转动来实现。3.根据权利要求1所述的机器人,其特征在于:所述驱动装置包括由电机或手动驱动的第一部分、与悬臂配合的第二部分和与配重配合的第三部分,所述第一部分同时驱动第二部分和第三部分动作。4.根据权利要求3所述的机器人,其特征在于:所述第三部分使得配重的动作至少存在一个与悬臂移动方向的相反的分量。5.根据权利要求3所述的机器人,其特征在于:所述悬臂上设置有与第二部分配合的第一配合部分,在配重设置有与第三部分配合的第二配合部分,在悬臂的端部还设置有工作器件。6.根据权利要求5所述的机器人,其特征在于:所述驱动装置和所述配重被构造为使得:工作器件的重力相对于第一部分的力矩由于工作器件的位移所产生的变化量与配重的重力相对于第一部分的力矩由于配重的位移所产生的变化量相等或接近。7.根据权利要求3-6中任一项所述的机器人,其特征在于:所述第一部分通过转动方式或移动方式驱动第二部分和第三部分动作。8.根据权利要求3-6中任一项所述的机器人,其特征在于:所述第一部分包括转轴,所述第二部分和第三部分均包括齿轮,第一配合部分和第二配合部分分别为可与齿轮配合的第一齿结构和第二齿结构,所述第一齿结构与悬臂固定连接,第二齿结构与配重固定连接。9.根据权利要求8所述的机器人,其特征在于:所述第二部分包括第一齿轮,所述第三部分包括第二齿轮,且第一齿轮和第二齿轮均安装在所述转轴上。10.根据权利要求9所述的机器人,其特征在于:将第一齿轮的直径与第二齿轮的直径的比值构造成等于或接近配重的重量与工作器件的重量之比。11.根据权利要求8所述的机器人,其特征在于:所述第二部分包括第一齿轮,所述第三部分包括第二齿轮和第三齿轮,且第一齿轮和第二齿轮均安装在所述转轴上;在配重的靠近第二齿结构的位置设置有第二轴,所述配重可围绕第二轴转动,第三齿轮同时与所述第二齿轮和第二齿结构啮合。12.根据权利要求3-6中任一项所述的机器人,其特征在于:所述第一部分包括转轴,所述第二部分和第三部分均包括螺纹驱动件,第一配合部分和第二配合部分具有与螺纹驱动件配合的第一螺纹配合件和第二螺纹配合件。13.根据权利要求12所述的机器人,其特征在于:所述第一螺纹驱动件和所述转轴形成第一螺杆,所述第二螺纹驱动件和所述转轴形成第二螺杆,所述第一螺纹配合件为第一螺母,第二螺纹配合件为第二螺母,第一螺杆和第一螺母形成第一丝杠,第二螺杆和第二螺母形成为第二丝杠,第一螺纹驱动件的导程与第二螺纹驱动件的导程的比值等于或接近配重的重量与所述工作器件的重量的比值。14.根据权利要求3-6中任一项所述的机器人,其特征在于:所述第一部分包括转轴,第
二部分和第三部分均包括曲柄和连杆;第一配合部分和第二配合部分具有与连杆铰接的第一滑块和第二滑块,所述第一滑块与悬臂固定连接,所述第二滑块与配重固定连接。
技术总结
本申请涉及一种机器人,其中,所述机器人包括主体,在主体上设置有可伸展收缩的悬臂、配重以及驱动装置,所述驱动装置同时驱动所述悬臂和配重的动作,使得在悬臂伸展或收缩的同时,配重相对于机器人的重心的距离变大或变小,以平衡所述悬臂的变化带来的重心不稳。采用这样的方案,悬臂和配重总是同时动作,且动作的位移满足了重心匹配的条件,实时进行了重心的平衡,相比于现有技术,使得机器人工作过程更加安全,延长了使用寿命。延长了使用寿命。延长了使用寿命。
技术研发人员:李元景 崔锦 胡斌 林东 吴华威
受保护的技术使用者:清华大学
技术研发日:2020.05.29
技术公布日:2021/12/2
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。